一种智能管材切削机器人的制作方法
本发明属于智能管材切削,尤其涉及一种智能管材切削机器人。
背景技术:
1、例如专利号为cn202310303397.0的一种管材外壁切槽器及切槽装置,包括:切槽组件,包括呈倒置u型结构的安装架,安装架设有刀盘。定位组件包括安装板,安装板的底部设有两组支撑轮组,支撑轮组之间的间距可调,两组定位组件的安装板设于安装架的外壁。侧板的外壁设有两根导杆,导杆沿竖直方向移动设置,安装板的两端均开设有与导杆配合的条形孔,导杆的末端设有锁紧螺母,但是该技术方案的缺点是没有办法实现切削不同长度的智能管材。
技术实现思路
1、本发明目的在于提供一种智能管材切削机器人,以解决没有办法实现切削不同长度的智能管材的技术问题。
2、为实现上述目的,本发明的一种智能管材切削机器人的具体技术方案如下:
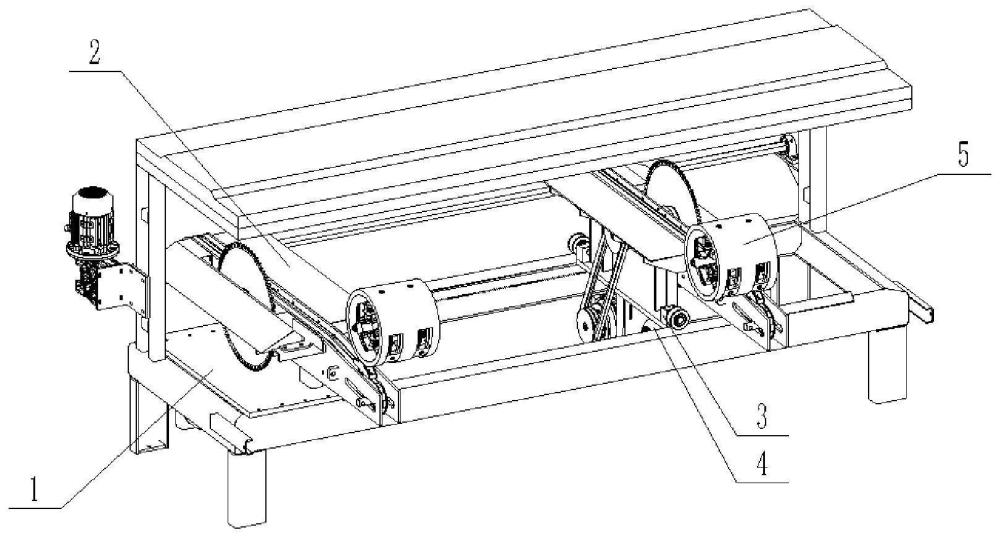
3、一种智能管材切削机器人,包括机架部件,还包括管材切削部、轨道部、位置调节部和套装部,所述机架部件上安装有管材切削部,管材切削部上安装有轨道部、位置调节部和套装部。
4、进一步,所述机架部件包括机架、执行电机一、多边形滑杆、减速器一、铰接架一,所述机架上安装有减速器一,减速器一上安装有执行电机一,减速器一的输出轴安装在多边形滑杆上,多边形滑杆通过铰接架一安装在机架上。
5、进一步,所述机架上同时固定安装有齿条杆和滑轨。
6、进一步,所述管材切削部包括管材切削支架、执行电机二、驱动带轮、连接皮带、传动带轮、切削盘转轴、切削盘、中端支架、传动履带、带轮a、带轮b、带轮c、转动安装套,所述管材切削支架上安装有执行电机二,执行电机二的输出轴上安装有驱动带轮,驱动带轮与传动带轮通过连接皮带连接,传动带轮固定安装在切削盘转轴一端,切削盘转轴另一端固定安装在切削盘上,管材切削支架上固定安装有中端支架,切削盘转轴转动安装在中端支架上,中端支架同时转动安装有带轮a、带轮b和带轮c,并且带轮a、带轮b和带轮c同时与传动履带配合连接,转动安装套固定安装在带轮c上,转动安装套与所述多边形滑杆滑动配合连接,管材切削部设置有两个,其中一个管材切削部中管材切削支架固定安装在所述机架上,其中另一个管材切削部通过轨道部和位置调节部与机架部件滑动安装。
7、进一步,所述转动安装套与所述多边形滑杆的滑动接触面为非圆形结构。
8、进一步,所述轨道部包括轨道安装座和轨道滚轮,所述轨道安装座上转动安装有轨道滚轮,轨道安装座固定安装在所述管材切削支架上,轨道滚轮与所述滑轨滚动配合。
9、进一步,所述位置调节部包括执行电机三、减速器三、输出转轴、滚齿,所述执行电机三安装在减速器三上,减速器三固定安装在所述管材切削支架上,减速器三上安装有输出转轴,输出转轴上安装有滚齿,滚齿与所述齿条杆啮合传动。
10、进一步,所述套装部包括安装套筒、履带安装块、弧形滑杆、定位卡槽二、弧形滑块、定位卡杆、定位卡杆推簧和运载结构,所述安装套筒上固定安装有履带安装块,履带安装块安装在所述传动履带上,安装套筒上安装有弧形滑杆,弧形滑杆上开有多个定位卡槽二,弧形滑杆上滑动安装有弧形滑块,弧形滑块内滑动安装有定位卡杆,定位卡杆和弧形滑块之间安装有定位卡杆推簧,定位卡杆与定位卡槽二配合连接,运载结构设置有多个,弧形滑块上安装有一个运载结构,安装套筒内固定安装有另外的运载结构。
11、进一步,多个所述的定位卡槽二沿着弧形滑杆的中轴线线性阵列设置。
12、进一步,所述运载结构包括滑动安装架、执行电机a、主动辊子、连接带、上端安装板、锁紧螺母、螺纹滑杆、缓冲弹簧、从动辊子,所述滑动安装架上安装有执行电机a,执行电机a的输出轴安装在主动辊子上,主动辊子和多个所述从动辊子同时转动安装在滑动安装架上,并且动辊子和多个所述从动辊子之间通过连接带连接,滑动安装架撒好难过固定安装有螺纹滑杆,螺纹滑杆与上端安装板滑动配合,并通过锁紧螺母锁紧限位,螺纹滑杆上套装有缓冲弹簧,并且缓冲弹簧设置在上端安装板和滑动安装架之间。
13、本发明的优点在于:
14、1.启动执行电机二,进而通过执行电机二驱动着驱动带轮运动,进而通过连接皮带带动着切削盘转轴转动,进而通过切削盘与智能管材的接触,进而完成对智能管材的切削;同时,通过位置调节部可以调节管材切削部在机架上的位置,进而使得两个管材切削部之间的间距发生变化,进而实现对不同长度的智能管材的切削;
15、2.启动执行电机三,并通过减速器三带动输出转轴转动,进而通过输出转轴带动着滚齿转动,通过滚齿与齿条杆啮合传动,进而使得两个管材切削部之间的间距发生变化;
16、3.将智能管材穿过多个运载结构之间,并通过运载结构实现对智能管材的运动,随着执行电机一的启动,进而通过减速器一带动着多边形滑杆转动,进而通过多边形滑杆驱动着转动安装套转动,进而通过转动安装套驱动着带轮c并连带着传动履带运动,进而通过传动履带驱动着履带安装块运动,使得履带安装块驱动着安装套筒并带动着智能管材向切削盘一端运动并使得切削盘与智能管材接触并完成切割;同时,通过相对弧形滑块在弧形滑杆上的位置,使得多个运载结构彼此之间的角度发生变化,进而方便通过不同位置的运载结构实现对不同规格结构的智能管材的运载,方便切削;
17、4.在缓冲弹簧的作用下,使得滑动安装架带动着主动辊子和多个从动辊子同时与智能管材的外壁接触,启动执行电机a,并通过主动辊子和从动辊子驱动着智能管材径向移动,方便一段智能管材完成切割时,后面的智能管材能继续完成切割,避免人工进行填料而导致人员受伤,并能提高工作效率。
技术特征:
1.一种智能管材切削机器人,包括机架部件(1),其特征在于,还包括管材切削部(2)、轨道部(3)、位置调节部(4)和套装部(5),所述机架部件(1)上安装有管材切削部(2),管材切削部(2)上安装有轨道部(3)、位置调节部(4)和套装部(5)。
2.根据权利要求1所述的一种智能管材切削机器人,其特征在于,所述机架部件(1)包括机架(1-1)、执行电机一(1-2)、多边形滑杆(1-3)、减速器一(1-4)、铰接架一(1-7),所述机架(1-1)上安装有减速器一(1-4),减速器一(1-4)上安装有执行电机一(1-2),减速器一(1-4)的输出轴安装在多边形滑杆(1-3)上,多边形滑杆(1-3)通过铰接架一(1-7)安装在机架(1-1)上。
3.根据权利要求2所述的一种智能管材切削机器人,其特征在于,所述机架(1-1)上同时固定安装有齿条杆(1-5)和滑轨(1-6)。
4.根据权利要求2所述的一种智能管材切削机器人,其特征在于,所述管材切削部(2)包括管材切削支架(2-1)、执行电机二(2-2)、驱动带轮(2-3)、连接皮带(2-4)、传动带轮(2-5)、切削盘转轴(2-6)、切削盘(2-7)、中端支架(2-8)、传动履带(2-9)、带轮a(2-10)、带轮b(2-11)、带轮c(2-12)、转动安装套(2-13),所述管材切削支架(2-1)上安装有执行电机二(2-2),执行电机二(2-2)的输出轴上安装有驱动带轮(2-3),驱动带轮(2-3)与传动带轮(2-5)通过连接皮带(2-4)连接,传动带轮(2-5)固定安装在切削盘转轴(2-6)一端,切削盘转轴(2-6)另一端固定安装在切削盘(2-7)上,管材切削支架(2-1)上固定安装有中端支架(2-8),切削盘转轴(2-6)转动安装在中端支架(2-8)上,中端支架(2-8)同时转动安装有带轮a(2-10)、带轮b(2-11)和带轮c(2-12),并且带轮a(2-10)、带轮b(2-11)和带轮c(2-12)同时与传动履带(2-9)配合连接,转动安装套(2-13)固定安装在带轮c(2-12)上,转动安装套(2-13)与所述多边形滑杆(1-3)滑动配合连接,管材切削部(2)设置有两个,其中一个管材切削部(2)中管材切削支架(2-1)固定安装在所述机架(1-1)上,其中另一个管材切削部(2)通过轨道部(3)和位置调节部(4)与机架部件(1)滑动安装。
5.根据权利要求4所述的一种智能管材切削机器人,其特征在于,所述转动安装套(2-13)与所述多边形滑杆(1-3)的滑动接触面为非圆形结构。
6.根据权利要求4所述的一种智能管材切削机器人,其特征在于,所述轨道部(3)包括轨道安装座(3-1)和轨道滚轮(3-2),所述轨道安装座(3-1)上转动安装有轨道滚轮(3-2),轨道安装座(3-1)固定安装在所述管材切削支架(2-1)上,轨道滚轮(3-2)与所述滑轨(1-6)滚动配合。
7.根据权利要求4所述的一种智能管材切削机器人,其特征在于,所述位置调节部(4)包括执行电机三(4-1)、减速器三(4-2)、输出转轴(4-3)、滚齿(4-4),所述执行电机三(4-1)安装在减速器三(4-2)上,减速器三(4-2)固定安装在所述管材切削支架(2-1)上,减速器三(4-2)上安装有输出转轴(4-3),输出转轴(4-3)上安装有滚齿(4-4),滚齿(4-4)与所述齿条杆(1-5)啮合传动。
8.根据权利要求4所述的一种智能管材切削机器人,其特征在于,所述套装部(5)包括安装套筒(5-1)、履带安装块(5-2)、弧形滑杆(5-3)、定位卡槽二(5-4)、弧形滑块(5-5)、定位卡杆(5-16)、定位卡杆推簧(5-17)和运载结构,所述安装套筒(5-1)上固定安装有履带安装块(5-2),履带安装块(5-2)安装在所述传动履带(2-9)上,安装套筒(5-1)上安装有弧形滑杆(5-3),弧形滑杆(5-3)上开有多个定位卡槽二(5-4),弧形滑杆(5-3)上滑动安装有弧形滑块(5-5),弧形滑块(5-5)内滑动安装有定位卡杆(5-16),定位卡杆(5-16)和弧形滑块(5-5)之间安装有定位卡杆推簧(5-17),定位卡杆(5-16)与定位卡槽二(5-4)配合连接,运载结构设置有多个,弧形滑块(5-5)上安装有一个运载结构,安装套筒(5-1)内固定安装有另外的运载结构。
9.根据权利要求8所述的一种智能管材切削机器人,其特征在于,多个所述的定位卡槽二(5-4)沿着弧形滑杆(5-3)的中轴线线性阵列设置。
技术总结
本发明属于智能管材切削技术领域,尤其涉及一种智能管材切削机器人,以解决没有办法实现切削不同长度的智能管材的技术问题,包括机架部件,还包括管材切削部、轨道部、位置调节部和套装部,所述机架部件上安装有管材切削部,管材切削部上安装有轨道部、位置调节部和套装部,启动执行电机二,进而通过执行电机二驱动着驱动带轮运动,进而通过连接皮带带动着切削盘转轴转动,进而通过切削盘与智能管材的接触,进而完成对智能管材的切削;同时,通过位置调节部可以调节管材切削部在机架上的位置,进而使得两个管材切削部之间的间距发生变化,进而实现对不同长度的智能管材的切削。
技术研发人员:吕黎红,朱政明,葛鹏河,梅坤,於春祥
受保护的技术使用者:天长市康弘石油管材有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!