一种焊点修正方法、装置、计算机设备以及存储介质与流程
本申请涉及芯片焊接,更具体地,涉及一种焊点修正方法、装置、计算机设备以及存储介质。
背景技术:
1、在集成电路(ic)芯片焊接封装领域,晶元焊盘与配对引线管脚的自动识别与定位是其中至关重要的环节之一;由于ic复杂的结构,焊盘与管脚的数量与布局复杂程度远远超越了普通的半导体器件(如led等),在用户进行焊线机操作前的焊点位置修正时,仍旧采用用户手动识别的方式,不仅效率十分低下,还存在极大的出错可能。
技术实现思路
1、本申请实施例在于提供一种焊点修正方法、装置、计算机设备以及存储介质,用于解决现有技术中手动修正焊点,而导致的效率低、精度差的问题。
2、为了解决上述技术问题,本申请实施例提供一种焊点修正方法,采用了如下所述的技术方案:
3、一种焊点修正方法,用于修正引线框架上的焊点,所述引线框架包括焊盘和管脚,所述方法包括如下步骤:
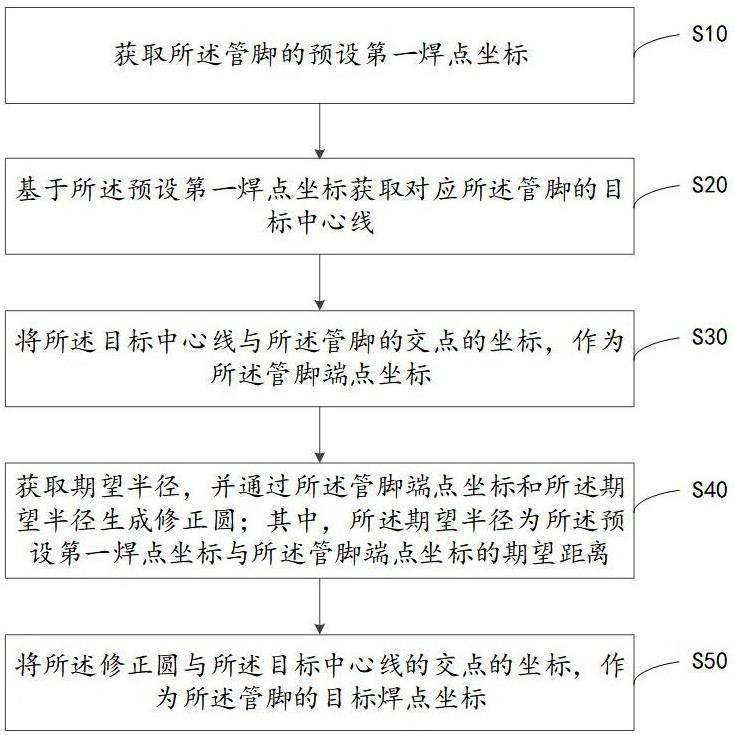
4、获取所述管脚的预设第一焊点坐标;
5、基于所述预设第一焊点坐标获取对应所述管脚的目标中心线;
6、将所述目标中心线与所述管脚的交点的坐标,作为所述管脚端点坐标;
7、获取期望半径,并通过所述管脚端点坐标和所述期望半径生成修正圆;其中,所述期望半径为所述预设第一焊点坐标与所述管脚端点坐标的期望距离;
8、将所述修正圆与所述目标中心线的交点的坐标,作为所述管脚的目标焊点坐标。
9、进一步地,所述将所述目标中心线与所述管脚的交点的坐标,作为所述管脚端点坐标的步骤,具体包括:
10、将所述目标中心线进行直线拟合得到向量v1;
11、确定所述目标中心线的朝向;
12、所述向量v1根据所述目标中心线的朝向延伸,直至向量v1与所述管脚相交,将所述向量v1与所述管脚的交点的坐标作为所述管脚端点坐标。
13、进一步地,所述确定所述目标中心线的朝向的步骤,具体包括:
14、获取所述焊盘的预设第二焊点坐标;
15、获取所述预设第一焊点坐标至所述预设第二焊点坐标的向量v0;
16、根据所述向量v0和所述向量v1,确定所述目标中心线的朝向。
17、进一步地,所述根据所述向量v0和所述向量v1,确定所述目标中心线的朝向的步骤,具体包括:
18、设所述向量v1的坐标为、所述向量v0的坐标为;
19、通过以下公式计算所述向量v0与所述向量v1内积:
20、;其中,p为所述向量v0与所述向量v1的内积;
21、当p大于0时,为所述目标中心线的朝向方向;
22、当p小于0时,为所述目标中心线的朝向方向。
23、进一步地,所述基于所述预设第一焊点坐标获取对应所述管脚的目标中心线的步骤,具体包括:
24、获取所述引线框架的图像;
25、对所述图像进行二值化处理和中心线提取,得到所述目标中心线。
26、进一步地,所述对所述图像进行中心线提取的步骤,具体包括:
27、使用二值化中心线提取算法,提取所述图像中所有管脚的中心线的集合;
28、将所有所述中心线与所述预设第一焊点坐标对比,将距离所述预设第一焊点坐标最近的所述中心线作为目标中心线。
29、进一步地,所述对所述图像进行二值化处理的步骤,具体包括:
30、计算所述图像的全局灰度分割阈值,并以此阈值对所述图像进行处理,将所述管脚与背景分开;
31、去除所述图像中的毛刺边界与噪点,并填充所述图像中的孔洞。
32、为了解决上述技术问题,本申请实施例还提供一种焊点修正装置,采用了如下所述的技术方案:
33、一种焊点修正装置,用于修正引线框架上的焊点,所述引线框架包括焊盘和管脚,包括:
34、获取模块,用于获取所述管脚的预设第一焊点坐标,基于所述预设第一焊点坐标获取对应所述管脚的目标中心线,以及获取期望半径;其中,所述期望半径为所述预设第一焊点坐标与管脚端点坐标的期望距离;
35、第一确定模块,将所述目标中心线与所述管脚的交点的坐标,作为所述管脚端点坐标;
36、生成模块,并通过所述管脚端点坐标和所述期望半径生成修正圆;
37、第二确定模块,将所述修正圆与所述目标中心线的交点的坐标,作为所述管脚的目标焊点坐标。
38、为了解决上述技术问题,本申请实施例还提供一种计算机设备,采用了如下所述的技术方案:
39、一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机可读指令,所述处理器执行所述计算机可读指令时实现如上所述的焊点修正方法的步骤。
40、为了解决上述技术问题,本申请实施例还提供一种计算机可读存储介质,采用了如下所述的技术方案:
41、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机可读指令,所述计算机可读指令被处理器执行时实现如上所述的焊点修正方法的步骤。
42、与现有技术相比,本申请实施例主要有以下有益效果:本申请在引线框架中的管脚上提前设置预设第一焊点坐标,当对待焊样品进行定位时,则自动寻找预设第一焊点坐标对应的管脚端点坐标,并进一步修正后,获得管脚的目标焊点坐标,基于管脚的目标焊点坐标,对管脚与焊盘进行引线键合;因此采用本申请提供的焊点修正方法可以提升ic焊线机的自动化操作水平,减少人为出错的概率,并进一步提高生产效率。
技术特征:
1.一种焊点修正方法,其特征在于,用于修正引线框架上的焊点,所述引线框架包括焊盘和管脚,所述方法包括如下步骤:
2.根据权利要求1所述的焊点修正方法,其特征在于,所述将所述目标中心线与所述管脚的交点的坐标,作为所述管脚端点坐标的步骤,具体包括:
3.根据权利要求2所述的焊点修正方法,其特征在于,所述确定所述目标中心线的朝向的步骤,具体包括:
4.根据权利要求3所述的焊点修正方法,其特征在于,所述根据所述向量v0和所述向量v1,确定所述目标中心线的朝向的步骤,具体包括:
5.根据权利要求1至4任一项所述的焊点修正方法,其特征在于,所述基于所述预设第一焊点坐标获取对应所述管脚的目标中心线的步骤,具体包括:
6.根据权利要求5所述的焊点修正方法,其特征在于,所述对所述图像进行中心线提取的步骤,具体包括:
7.根据权利要求5所述的焊点修正方法,其特征在于,所述对所述图像进行二值化处理的步骤,具体包括:
8.一种焊点修正装置,其特征在于,用于修正引线框架上的焊点,所述引线框架包括焊盘和管脚,包括:
9.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器中存储有计算机可读指令,所述处理器执行所述计算机可读指令时实现如权利要求1至7中任一项所述的焊点修正方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机可读指令,所述计算机可读指令被处理器执行时实现如权利要求1至7中任一项所述的焊点修正方法的步骤。
技术总结
本申请属于芯片焊接技术领域,涉及一种焊点修正方法、装置、计算机设备以及存储介质。所述焊点修正方法包括如下步骤:获取所述管脚的预设第一焊点坐标;基于所述预设第一焊点坐标获取对应所述管脚的目标中心线;将所述目标中心线与所述管脚的交点的坐标,作为所述管脚端点坐标;获取期望半径,并通过所述管脚端点坐标和所述期望半径生成修正圆;其中,所述期望半径为所述预设第一焊点坐标与所述管脚端点坐标的期望距离;将所述修正圆与所述目标中心线的交点的坐标,作为所述管脚的目标焊点坐标。本申请提供的技术方案能够可以提升IC焊线机的自动化操作水平,减少人为出错的概率,并进一步提高生产效率。
技术研发人员:陈健桦,朱绍德,李峥嵘,罗波
受保护的技术使用者:深圳市大族封测科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!