双凸轮驱动曲线轨迹的焊接机构的制作方法
本发明涉及焊接设备领域,特别涉及了一种双凸轮驱动曲线轨迹的焊接机构。
背景技术:
1、在航天、航空、船舶和石油化工等领域,大量存在各种具有曲线轮廓的设备。在设备的制造生产过程中,需要将工件沿曲线轮廓轨迹焊接起来。目前,由于曲线轨迹焊接比较难通过自动化实现,因此曲线轨迹的焊接多数采用人工焊接方式,少数也有采用多轴型工业机器人进行焊接。前者对工人的技术水平要求高且工人的劳动强度大、焊接效率低,焊接质量不易保证;后者设备复杂,生产和维护成本高。
2、本申请所要解决的技术问题为:如何通过机械结构实现曲线轨迹自动焊接。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种双凸轮驱动曲线轨迹的焊接机构,其能够实现自动沿曲线轨迹焊接,焊接质量和效率高的优点。
2、本发明所采用的技术方案为:
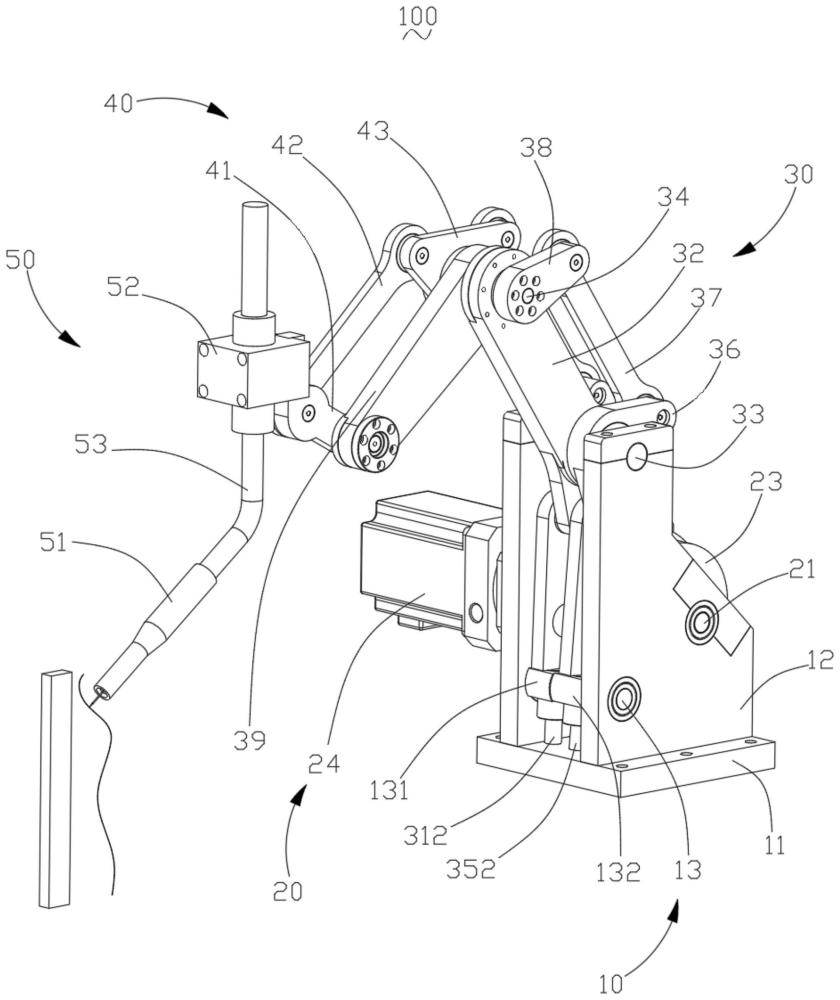
3、一种双凸轮驱动曲线轨迹的焊接机构,包括机座,还包括安装在机座上的动力组件、主传动组件、从传动组件及焊接组件;
4、动力组件包括驱动轴、第一凸轮及第二凸轮,驱动轴与机座旋转连接,第一凸轮与第二凸轮均与驱动轴传动连接;
5、主传动组件包括第一主动摇杆、第一连杆、第二主动摇杆、第一杠杆件、第二连杆、第三连杆及第四连杆,第一主动摇杆与第一凸轮传动连接,第一连杆与机座通过第一连接轴枢接,第一连杆的一端与第一主动摇杆枢接,另一端旋转连接有第二连接轴,第二主动摇杆与第二凸轮传动连接,第二连杆与第二主动摇杆通过第一杠杆件枢接,第一杠杆件与第一连接轴旋转连接,第三连杆的一端与第二连杆枢接,另一端通过第二连接轴与第四连杆的一端固定连接;
6、从传动组件包括安装杆、从动摇杆、第二杠杆件及第五连杆,安装杆与第四连杆的另一端枢接,从动摇杆的一端与安装杆枢接,另一端与第二杠杆件枢接,第二杠杆件与第二连接轴旋转连接,第五连杆的一端与第二杠杆件枢接,另一端与机座枢接;
7、焊接组件包括焊枪,焊枪安装在安装杆上。
8、本发明通过双凸轮分别驱动两个摇杆运动,再由两个摇杆驱动多个连杆协同运动使得焊枪能够按照预设的曲线轨迹对工件进行焊接;本机构通过纯机械结构实现了较为复杂的曲线轨迹焊接,整体设备具有结构简单、运行稳定而且成本低的特点,特别适用于批量同规格产品的焊接生产。
9、在一些实施方式中,第一主动摇杆上旋转连接有第一从动滚子,第一从动滚子与第一凸轮保持抵接;
10、第二主动摇杆上旋转连接有第二从动滚子,第二从动滚子与第二凸轮保持抵接。
11、通过设置第一从动滚子有利于第一主动摇杆与第一凸轮保持抵接,同理通过设置第二从动滚子有利于第二主动摇杆与第二凸轮保持抵接。
12、在一些实施方式中,机座上旋转设置有限位轴,限位轴包括第一插接块与第二插接块;
13、第一插接块上开设有第一插接孔,第一主动摇杆上设置有与第一插接孔对应的第一插接柱,第一插接柱穿设第一插接孔与第一插接块活动连接;
14、第二插接块上开设有第二插接孔,第二主动摇杆上设置有与第二插接孔对应的第二插接柱,第二插接柱穿设第二插接孔与第二插接块活动连接。
15、通过设置限位轴可以限制第一主动摇杆与第二主动摇杆沿限位轴的轴向发生位移;而通过第一插接块与第一插接柱配合可以使得第一主动摇杆可以沿限位轴的径向转动和沿第一插接孔的轴向滑动,从而确保第一主动摇杆可以与第一凸轮保持传动连接;同理通过设置第二插接块与第二插接柱可以确保第二主动摇杆与第二凸轮保持传动连接。
16、在一些实施方式中,安装杆的一端与第四连杆的一端枢接,另一端与焊枪连接,从动摇杆的一端与安装杆的中部枢接。这样设置可以使得焊枪可以在移动过程中保持与焊接点成一定的角度,以确保焊接质量。
17、在一些实施方式中,焊接组件还包括安装座,安装座与安装杆远离第四连杆的一端连接,焊枪安装在安装座上。通过设置安装座,方便于安装焊枪。
18、在一些实施方式中,焊接组件还包括调节件,调节件与安装座可拆卸连接,焊枪与调节件连接。通过设置调节件可以便于调节焊枪的位姿,使得焊枪的位姿与焊缝的轨迹相适应,提高焊接质量。
19、在一些实施方式中,动力组件还包括动力元件,动力元件与驱动轴传动连接。
20、在一些实施方式中,动力元件包括马达与变速器,马达的输出端与变速器的输入端传动连接,变速器的输出端与驱动轴传动连接。
21、在一些实施方式中,机座包括底板与立板,立板与底板连接,驱动轴与立板旋转连接,第一连接轴与立板固定连接,第五连杆与立板枢接,限位轴与立板旋转连接。
22、在一些实施方式中,立板的数量为两个,两个立板相对间隔设置,第一凸轮、第二凸轮、第一主动摇杆及第二主动摇杆设置在两个立板之间。通过设置两个立板,并将运动部件设置在两个立板之间可以起到防护的作用。
23、本发明的有益效果为:
24、本双凸轮驱动曲线轨迹的焊接机构,通过一个电机带动两个凸轮分别驱动两个主动摇杆,再由两个主动摇杆驱动多个连杆协同动作,最后由连杆驱动焊枪按照预定的曲线轨迹对工件进行自动焊接,来代替人工焊接;本机构采用机械结构协同传动实现曲线轨迹焊接,结构简洁,传动精度高,设备成本投入低;焊接不同曲线轨迹的工件只需更换相对应的凸轮即可,无需编程控制,操作简单方便。
技术特征:
1.一种双凸轮驱动曲线轨迹的焊接机构(100),包括机座(10),其特征在于,还包括安装在所述机座(10)上的动力组件(20)、主传动组件(30)、从传动组件(40)及焊接组件(50);
2.根据权利要求1所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述第一主动摇杆(31)上旋转连接有第一从动滚子(311),所述第一从动滚子(311)与第一凸轮(22)保持抵接;
3.根据权利要求1所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述机座(10)上旋转设置有限位轴(13),所述限位轴(13)包括第一插接块(131)与第二插接块(132);
4.根据权利要求1所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述安装杆(41)的一端与第四连杆(39)的一端枢接,另一端与焊枪(51)连接,所述从动摇杆(42)的一端与安装杆(41)的中部枢接。
5.根据权利要求4所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述焊接组件(50)还包括安装座(52),所述安装座(52)与安装杆(41)远离第四连杆(39)的一端连接,所述焊枪(51)安装在安装座(52)上。
6.根据权利要求5所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述焊接组件(50)还包括调节件(53),所述调节件(53)与安装座(52)可拆卸连接,所述焊枪(51)与调节件(53)连接。
7.根据权利要求1所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述动力组件(20)还包括动力元件(24),所述动力元件(24)与驱动轴(21)传动连接。
8.根据权利要求7所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述动力元件(24)包括马达与变速器,所述马达的输出端与变速器的输入端传动连接,所述变速器的输出端与驱动轴(21)传动连接。
9.根据权利要求3所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述机座(10)包括底板(11)与立板(12),所述立板(12)与底板(11)连接,所述驱动轴(21)与立板(12)旋转连接,所述第一连接轴(33)与立板(12)固定连接,所述第五连杆(44)与立板(12)枢接,所述限位轴(13)与立板(12)旋转连接。
10.根据权利要求9所述的双凸轮驱动曲线轨迹的焊接机构(100),其特征在于,所述立板(12)的数量为两个,两个所述立板(12)相对间隔设置,所述第一凸轮(22)、第二凸轮(23)、第一主动摇杆(31)及第二主动摇杆(35)设置在两个立板(12)之间。
技术总结
本发明属于焊接设备领域,提供了一种双凸轮驱动曲线轨迹的焊接机构,包括机座、及安装在机座上的动力组件、主传动组件、从传动组件及焊接组件;动力组件包括驱动轴、第一凸轮及第二凸轮,驱动轴与机座旋转连接,第一凸轮与第二凸轮均与驱动轴传动连接;主传动组件与从传动组件和第一凸轮与第二凸轮传动连接;焊接组件包括焊枪,焊枪由主传动组件与从传动组件协同驱动沿预设曲线轨迹对工件进行焊接。本双凸轮驱动曲线轨迹的焊接机构,通过凸轮驱动主动摇杆带动多个连杆协同动作,最后由连杆驱动焊枪按照预定的曲线轨迹对工件进行自动焊接,结构简洁可靠,设备成本投入低;焊接不同曲线轨迹的工件只需更换相对应的凸轮即可,操作简单方便。
技术研发人员:吴国章
受保护的技术使用者:广东益鼎机器人有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!