一种视觉定位导引激光焊接方法及系统与流程
本发明涉及机器视觉领域,具体涉及一种视觉定位导引激光焊接方法及系统。
背景技术:
1、激光焊接是激光加工技术应用的重要方面之一,主要应用于微小零件的精密焊接。激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、功率密度和重复频率等参数,使工件融化,形成特定的熔池。
2、焊缝一般具有一定的宽度,在传统的焊接过程中,难以保证焊接头始终保持在焊缝的中心。当焊接头偏离焊接头中心时,会造成焊缝两侧受热不均,影响焊接质量。同时实际焊接应用中,焊缝两侧边缘形状可能不规则,存在锯齿状或是在一定长度内具有多个起伏的边缘,造成在短距离内具有多个中心点,焊接头在焊接过程中会出现频繁的抖动,即影响焊接效率,也影响焊接质量。
技术实现思路
1、本发明提供一种视觉定位导引激光焊接方法及系统,能够减少焊接头移动的距离,从而提高焊接效率和焊接质量。
2、为实现上述目的,本发明采用以下技术方案实现:
3、一种视觉定位导引激光焊接方法,包括以下步骤:
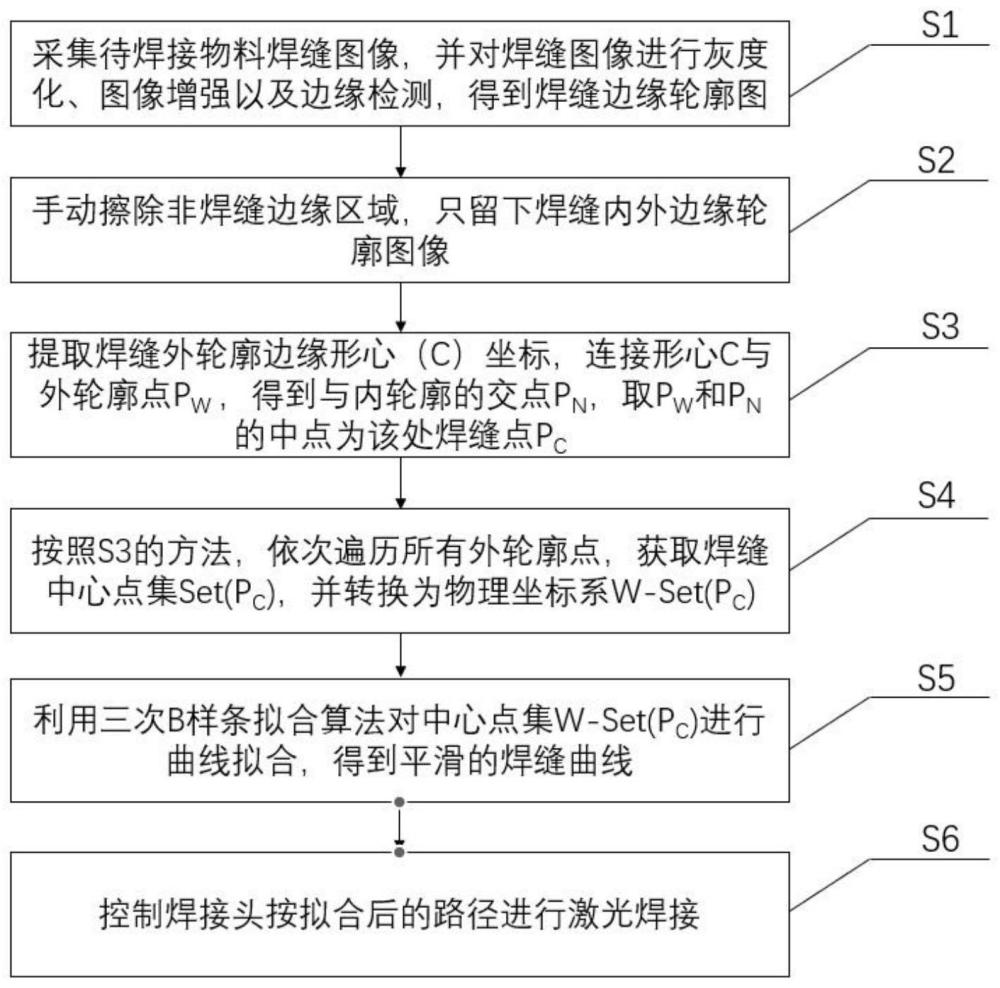
4、s1、相机采集待焊接物件焊缝表面图像,并对图像进行处理,得到焊缝边缘轮廓图;
5、s2、手动擦除非焊缝边缘区域,只留下焊缝内外边缘轮廓图像;
6、s3、提取焊缝外边缘轮廓形心c,连接形心c与外轮廓点pw,得到与内轮廓的交点pn,取pw与pn的中点为该处的焊缝点pc;
7、s4、按照步骤s3的方法,依次遍历所有外轮廓点,获取焊缝的中心点集set(pc),并将其转换成物理坐标点集w-set(pc);
8、s5、利用拟合算法对中心点集w-set(pc)进行曲线拟合,得到平滑的焊缝曲线;
9、s6、控制焊接头按拟合后的路径进行焊接。
10、作为上述方案的优选,步骤s1包括:首先控制高清ccd相机运动至待焊接物件上方,通过调节焦距,拍摄清晰的焊缝图像,并对图像进行预处理、灰度化、图像增强处理;对处理后的图像进行分割,将焊缝图像从背景中分割出来;对分割出来的焊缝图像进行边缘检测操作,并提取轮廓点,得到焊缝轮廓图片。
11、作为上述方案的优选,步骤s2包括:利用鼠标在图像上采用类似“橡皮擦”功能,将分割出来的焊缝图像中的其他干扰轮廓擦除,其原理为光标在图像上移动是获取图像像素坐标,当光标移动到干扰轮廓时,将以光标为中心一定区域内的像素置0,从而将白色的轮廓变为黑色,实现将干扰轮廓擦除。
12、作为上述方案的优选,步骤s3、s4包括:获取焊缝外轮廓的形心c坐标,连接形心与外轮廓点pw,连接与内轮廓相交于点pn,取pw和的pn中点作为该处的焊接点pc,采用同样的方式遍历所有的外轮廓点,得到焊接中心点集set(pc),该点集坐标为图像坐标,还需要将图像坐标转换为物理坐标,利用“九点标定”法,得到图像坐标系与物理坐标系之间的转换关系,通过对应的转换关系,推算出焊缝中心点的物理坐标w-set(pc)。
13、作为上述方案的优选,步骤s5包括:对离散的焊缝中心点集w-set(pc)进行三次b样条拟合,得到平滑的曲线。
14、作为上述方案的优选,步骤s6包括:将拟合后的曲线作为焊接路径传送给运动控制器,运动控制器控制焊接头按焊缝路径运动,完成激光焊接。
15、一种视觉定位导引激光焊接系统,包括存储器、处理器及存储在存储器上的计算机程序,处理器执行计算机程序以实现上述方法。
16、由于具有上述结构,本发明的有益效果在于:
17、通过视觉检测焊缝边缘,提取焊缝中心,确定焊接路径;同时采用三次b样条插值算法对焊接路径进行拟合,得到较为平滑的焊接路径。通过以上两点改进,即保证焊接过程中焊接头始终处于焊缝中心处,也保证了焊接过程中,焊接头不会出现频繁的抖动,减少焊接头移动的距离,从而提高焊接效率和焊接质量。
技术特征:
1.一种视觉定位导引激光焊接方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种视觉定位导引激光焊接方法,其特征在于:步骤s1包括:首先控制高清ccd相机运动至待焊接物件上方,通过调节焦距,拍摄清晰的焊缝图像,并对图像进行预处理、灰度化、图像增强处理;对处理后的图像进行分割,将焊缝图像从背景中分割出来;对分割出来的焊缝图像进行边缘检测操作,并提取轮廓点,得到焊缝轮廓图片。
3.根据权利要求1所述的一种视觉定位导引激光焊接方法,其特征在于:步骤s2包括:利用鼠标在图像上采用类似“橡皮擦”功能,将分割出来的焊缝图像中的其他干扰轮廓擦除,其原理为光标在图像上移动是获取图像像素坐标,当光标移动到干扰轮廓时,将以光标为中心一定区域内的像素置0,从而将白色的轮廓变为黑色,实现将干扰轮廓擦除。
4.根据权利要求1所述的一种视觉定位导引激光焊接方法,其特征在于:步骤s3、s4包括:获取焊缝外轮廓的形心c坐标,连接形心与外轮廓点pw,连接与内轮廓相交于点pn,取pw和的pn中点作为该处的焊接点pc,采用同样的方式遍历所有的外轮廓点,得到焊接中心点集set(pc),该点集坐标为图像坐标,还需要将图像坐标转换为物理坐标,利用“九点标定”法,得到图像坐标系与物理坐标系之间的转换关系,通过对应的转换关系,推算出焊缝中心点的物理坐标w-set(pc)。
5.根据权利要求1所述的一种视觉定位导引激光焊接方法,其特征在于:步骤s5包括:对离散的焊缝中心点集w-set(pc)进行三次b样条拟合,得到平滑的曲线。
6.根据权利要求1所述的一种视觉定位导引激光焊接方法,其特征在于:步骤s6包括:将拟合后的曲线作为焊接路径传送给运动控制器,运动控制器控制焊接头按焊缝路径运动,完成激光焊接。
7.一种视觉定位导引激光焊接系统,包括存储器、处理器及存储在存储器上的计算机程序,其特征在于:处理器执行计算机程序以实现权利要求1-6任意一项权利要求所述方法。
技术总结
本发明公开了一种视觉定位导引激光焊接方法及系统,包括采集待焊接物件焊缝表面图像并对图像进行处理,得到焊缝边缘轮廓图;擦除非焊缝边缘区域,获得焊缝内外边缘轮廓图像;提取焊缝外边缘轮廓形心坐标,连接形心C与外轮廓点P<subgt;w</subgt;,得到与内轮廓的交点P<subgt;N</subgt;,取P<subgt;w</subgt;与P<subgt;N</subgt;的中点为该处焊缝点P<subgt;C</subgt;;按照上述方法依次遍历所有外轮廓点,获取焊缝的中心点集Set(P<subgt;C</subgt;),并将其转换成物理坐标点集W<subgt;‑</subgt;Set(P<subgt;C</subgt;);利用拟合算法对中心点集进行曲线拟合,得到平滑的焊缝曲线;控制焊接头按拟合后的路径进行焊接。本发明获取焊缝内外边缘图形,得到焊缝中心路径作为焊接路径,提升焊接精度;同时采用三次B样条曲线拟合算法,得到较为平滑的焊接路径,减少焊接头的抖动,提升焊接质量。
技术研发人员:柳邦,李少寒,周鹏,周杰,余杨杰,汪伟
受保护的技术使用者:湖北三江航天红峰控制有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!