一种用于机器人焊接的工件支撑架的制作方法
本技术涉及机器人焊接作业,具体为一种用于机器人焊接的工件支撑架。
背景技术:
1、焊接作业中,为方便对工件进行支撑,在支撑架上安装翻转夹具的方式被广泛应用,但目前的作业方式还存在以下缺陷;
2、1、目前的机器人焊接支撑架中的翻转夹具地对夹持部件的尺寸严格限制,无法灵活的对于不同尺寸的工件进行夹持焊接。
3、2、目前的机器人焊接支撑架中的翻转夹具无法针对重型部件和轻型部件切换夹持模式,使用不够灵活。
技术实现思路
1、本实用新型的目的在于提供一种用于机器人焊接的工件支撑架,以克服背景技术缺陷。
2、为解决上述问题,本实用新型采用如下的技术方案;
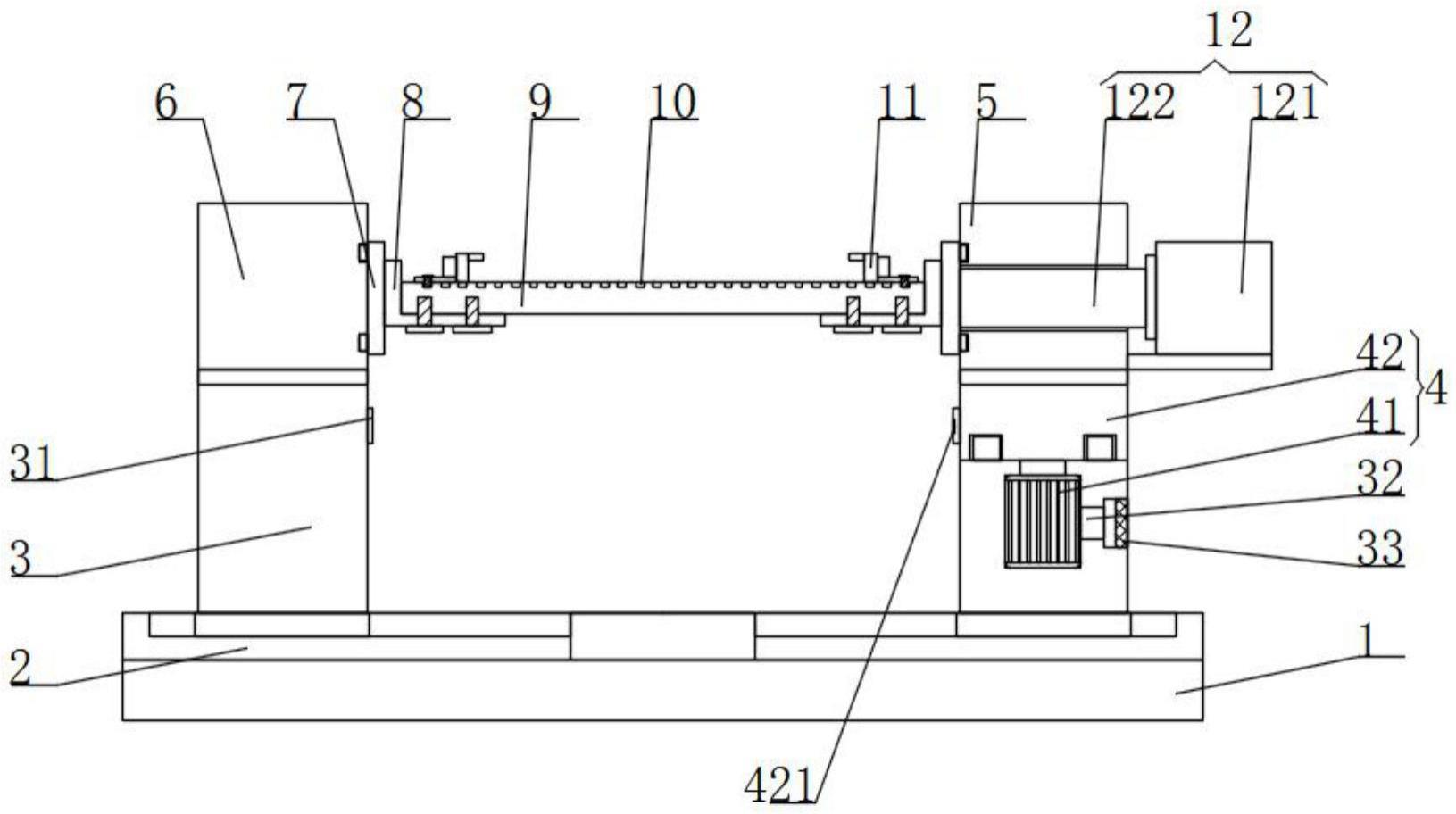
3、一种用于机器人焊接的工件支撑架,包括基座,所述基座的顶部安装有两个驱动轨,两个所述驱动轨之间通过连接块固定连接,两个所述驱动轨上均安装有支撑架,右侧的所述支撑架的上安装有第一驱动机构,所述第一驱动机构上固定安装有第一固定座,左侧所述支撑架的顶部安装有第二固定座,所述第一固定座和第二固定座相对的一侧均转动连接有转动盘,所述第二固定座上安装有第二驱动组件,所述第二驱动组件与右侧转动盘相配合,两个所述转动盘相对的一侧均固定连接有l形连接板,两个所述l形连接板通过螺栓固定连接有夹具座,所述夹具座的上开设有两排螺纹孔,所述夹具座上通过两排螺纹孔安装有两个气动夹具。
4、作为上述技术方案的进一步描述:所述第一驱动机构包括第一伺服电机和转动座,所述第一伺服电机安装至右侧的支撑架的内部,所述转动座的底部转动连接至右侧的支撑架的顶部,所述第一伺服电机的输出端通过联轴器与转动座固定连接,所述转动座的顶部与第一固定座固定连接。
5、作为上述技术方案的进一步描述:所述第二驱动组件包括第二伺服电机和传动杆,所述第二伺服电机安装至第一固定座上,所述第二伺服电机的输出端通过联轴器与传动杆固定连接,所述传动杆的另一端贯穿并转动连接至第一固定座的左侧,所述传动杆的左端与转动盘固定连接。
6、作为上述技术方案的进一步描述:所述转动座上固定连接有定位激光发生器,左侧的所述支撑架的右侧固定连接有激光接收器,所述定位激光发生器与激光接收器相配合。
7、作为上述技术方案的进一步描述:右侧所述支撑架上开设有散热孔,所述散热孔的内部固定连接有防尘网。
8、作为上述技术方案的进一步描述。
9、相比于现有技术,本实用新型的优点在于:
10、本方案通过第一驱动机构,第二驱动机构配合两个可更换的夹具座配合使用,从而实现了装置具备方便灵活对不同尺寸的工件进行夹持焊接,并且方便针对重型和轻型部件切换夹持模式,更加灵活的优点。
技术特征:
1.一种用于机器人焊接的工件支撑架,包括基座(1),其特征在于:所述基座(1)的顶部安装有两个驱动轨(2),两个所述驱动轨(2)之间通过连接块固定连接,两个所述驱动轨(2)上均安装有支撑架(3),右侧的所述支撑架(3)的上安装有第一驱动机构(4),所述第一驱动机构(4)上固定安装有第一固定座(5),左侧所述支撑架(3)的顶部安装有第二固定座(6),所述第一固定座(5)和第二固定座(6)相对的一侧均转动连接有转动盘(7),所述第二固定座(6)上安装有第二驱动组件(12),所述第二驱动组件(12)与右侧转动盘(7)相配合,两个所述转动盘(7)相对的一侧均固定连接有l形连接板(8),两个所述l形连接板(8)通过螺栓固定连接有夹具座(9),所述夹具座(9)的上开设有两排螺纹孔(10),所述夹具座(9)上通过两排螺纹孔(10)安装有两个气动夹具(11)。
2.根据权利要求1所述的一种用于机器人焊接的工件支撑架,其特征在于:所述第一驱动机构(4)包括第一伺服电机(41)和转动座(42),所述第一伺服电机(41)安装至右侧的支撑架(3)的内部,所述转动座(42)的底部转动连接至右侧的支撑架(3)的顶部,所述第一伺服电机(41)的输出端通过联轴器与转动座(42)固定连接,所述转动座(42)的顶部与第一固定座(5)固定连接。
3.根据权利要求1所述的一种用于机器人焊接的工件支撑架,其特征在于:所述第二驱动组件(12)包括第二伺服电机(121)和传动杆(122),所述第二伺服电机(121)安装至第一固定座(5)上,所述第二伺服电机(121)的输出端通过联轴器与传动杆(122)固定连接,所述传动杆(122)的另一端贯穿并转动连接至第一固定座(5)的左侧,所述传动杆(122)的左端与转动盘(7)固定连接。
4.根据权利要求2所述的一种用于机器人焊接的工件支撑架,其特征在于:所述转动座(42)上固定连接有定位激光发生器(421),左侧的所述支撑架(3)的右侧固定连接有激光接收器(31),所述定位激光发生器(421)与激光接收器(31)相配合。
5.根据权利要求1所述的一种用于机器人焊接的工件支撑架,其特征在于:右侧所述支撑架(3)上开设有散热孔(32),所述散热孔(32)的内部固定连接有防尘网(33)。
技术总结
本技术公开了一种用于机器人焊接的工件支撑架,包括基座,所述基座的顶部安装有两个驱动轨,两个所述驱动轨之间通过连接块固定连接,两个所述驱动轨上均安装有支撑架,右侧的所述支撑架的上安装有第一驱动机构,所述第一驱动机构上固定安装有第一固定座。该技术通过基座对装置进行支撑,通过两个驱动轨带动两个支撑架相对直线运行调节位置,以实现调节两者之间的距离,并且安装是适配的夹具座,将重型工件采用两个支撑架支撑的方式配合夹具座上设气动夹具进行夹持,使得装置对重型工件夹持稳定,从而实现了装置具备方便灵活对不同尺寸的工件进行夹持焊接,并且方便针对重型和轻型部件切换夹持模式,更加灵活的优点。
技术研发人员:张振岗,陈雪梅
受保护的技术使用者:常州泰翔自动化设备科技有限公司
技术研发日:20230120
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!