一种激光焊接夹取装置及机器人的制作方法
本技术涉及继电器,具体而言,涉及一种激光焊接夹取装置及机器人。
背景技术:
1、受益于全球电动化趋势,高压直流继电器作为新能源汽车核心零部件,其组件的密封焊接成为了影响质量的重要因素。高压直流继电器金属壳与动组件的轭铁板从前段工序下料后,须机械手取料后完成激光焊接上料。在现有的激光焊接夹取机构中,仅采用夹指夹紧产品后取放料,对金属壳与动组件轭铁板缺少压紧定位工序,进而会影响产品尺寸的一致性。
技术实现思路
1、本实用新型公开了一种激光焊接夹取装置,旨在改善上述技术问题。
2、本实用新型采用了如下方案:
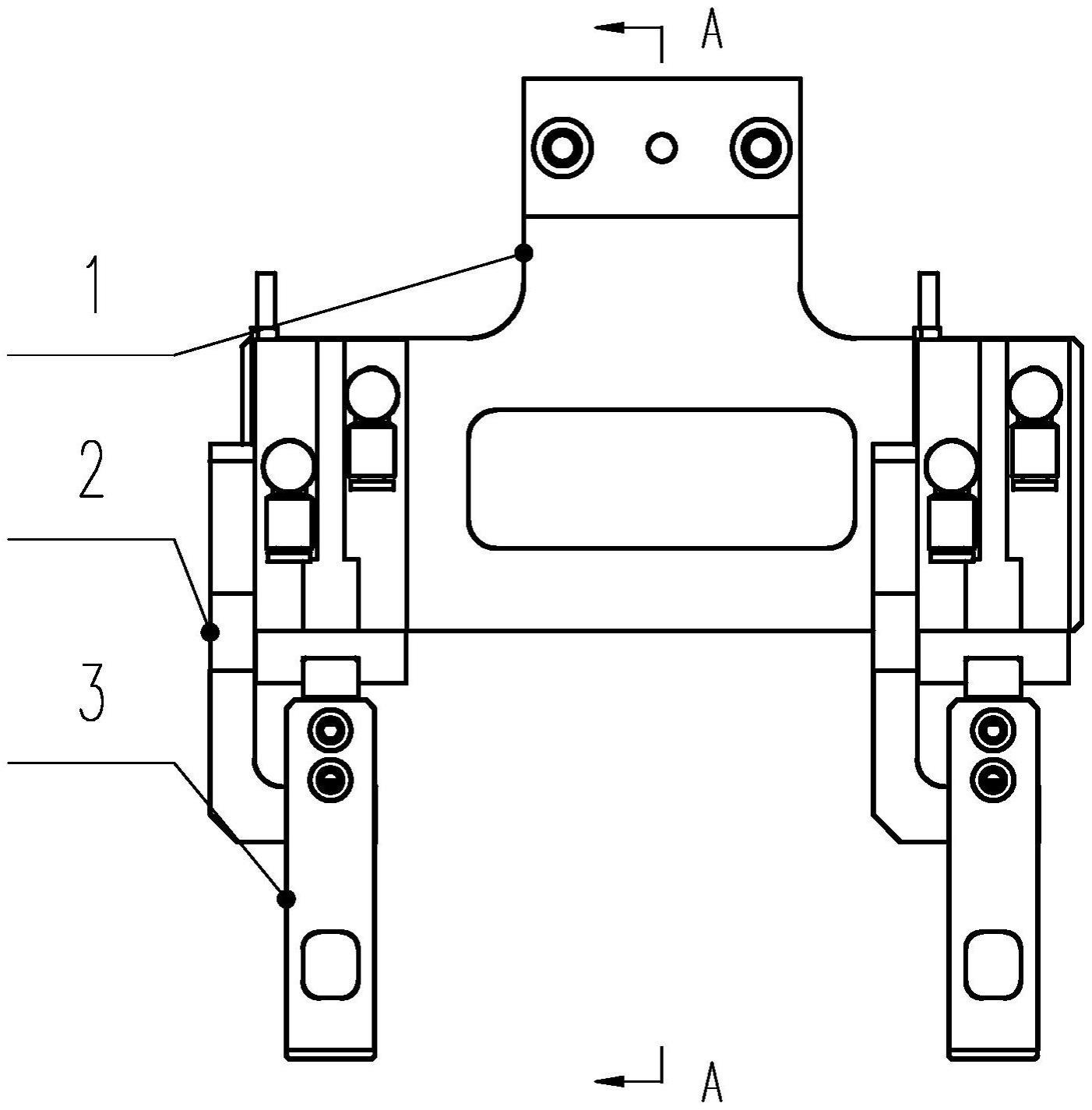
3、一种激光焊接夹取装置,包括底板、夹指、弹压机构及设有孔位的气爪,所述气爪安装在所述底板的相对两端上,且所述气爪和气爪的孔位上均安装有夹指和弹压机构;所述弹压机构包括上料压块和上料压杆,所述上料压块均锁紧在气爪的同侧上,所述上料压杆上套入有弹性件,并从下往上穿过上料压块上的通孔以固定在上料压块上。
4、作为进一步改进,所述气爪为双气爪,分别安装在底板的相对两端。
5、作为进一步改进,所述上料压杆顶端设有用于与双螺母连接的螺纹。
6、作为进一步改进,所述弹性件为压簧。
7、作为进一步改进,所述上料压杆底端设有防脱部,所述压簧连接在所述双螺母和所述防脱部之间,且其尺寸小于防脱部的尺寸。
8、作为进一步改进,包括四轴夹紧抱紧块,所述四轴夹紧抱紧块设置在所述底板的顶端上。
9、一种机器人,包括机器人主体及如上述任意一项所述的激光焊接夹取装置,所述激光焊接夹取装置中的底板和四轴夹紧抱紧块共同固定在所述机器人主体上。
10、通过采用上述技术方案,本实用新型可以取得以下技术效果:
11、本申请的激光焊接夹取装置,通过上料压块压住产品,上料压杆套配的弹性件提供压紧力,从而对工件实现自适应压紧,改善了现有激光焊接夹取机构中,仅采用夹指夹紧产品后取放料,对金属壳与动组件轭铁板缺少压紧定位工序,进而影响产品尺寸一致性的问题。
技术特征:
1.一种激光焊接夹取装置,其特征在于,包括底板、夹指、弹压机构及设有孔位的气爪,所述气爪安装在所述底板的相对两端上,且所述气爪和气爪的孔位上均安装有夹指和弹压机构;所述弹压机构包括上料压块和上料压杆,所述上料压块均锁紧在气爪的同侧上,所述上料压杆上套入有弹性件,并从下往上穿过上料压块上的通孔以固定在上料压块上。
2.根据权利要求1所述的激光焊接夹取装置,其特征在于,所述气爪为双气爪,分别安装在底板的相对两端。
3.根据权利要求1所述的激光焊接夹取装置,其特征在于,所述上料压杆顶端设有用于与双螺母连接的螺纹。
4.根据权利要求3所述的激光焊接夹取装置,其特征在于,所述弹性件为压簧。
5.根据权利要求4所述的激光焊接夹取装置,其特征在于,所述上料压杆底端设有防脱部,所述压簧连接在所述双螺母和所述防脱部之间,且其尺寸小于防脱部的尺寸。
6.根据权利要求1所述的激光焊接夹取装置,其特征在于,包括四轴夹紧抱紧块,所述四轴夹紧抱紧块设置在所述底板的顶端上。
7.一种机器人,其特征在于,包括机器人主体及如权利要求1-6任意一项所述的激光焊接夹取装置,所述激光焊接夹取装置中的底板和四轴夹紧抱紧块共同固定在所述机器人主体上。
技术总结
本技术提供一种激光焊接夹取装置,涉及继电器领域,包括底板、夹指、弹压机构及设有孔位的气爪,气爪安装在底板的相对两端上,且气爪和气爪的孔位上均安装有夹指和弹压机构;弹压机构包括上料压块和上料压杆,上料压块均锁紧在气爪的同侧上,上料压杆上套入有弹性件,并从下往上穿过上料压块上的通孔以固定在上料压块上。在夹取过程中,上料压块压住产品,上料压杆套配的弹性件提供压紧力,从而对工件实现自适应压紧,改善了现有激光焊接夹取机构中,仅采用夹指夹紧产品后取放料,对金属壳与动组件轭铁板缺少压紧定位工序,进而影响产品尺寸一致性的问题。本申请另提供一种机器人。
技术研发人员:方波,李康
受保护的技术使用者:厦门宏发工业机器人有限公司
技术研发日:20230213
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!