一种新型自动焊钳的制作方法
本技术属于焊钳,涉及一种新型自动焊钳。
背景技术:
1、随着工业自动化的不断发展,特别是汽车工业的迅猛发展,对生产设备的自动化、标准化和节能性能提出了更高的要求,以适应现代化生产的需要。传统的伺服焊钳的结构复杂,种类繁多,千变万化,相互之间几乎没有可以共用的标准零件,设计制造都非常繁复,客户为了保证自动生产线的正常运行而备库的伺服焊钳和各种零部件种类多且数量大,成本高。
2、现有的焊钳中都是通过电缸或者气缸驱动电极移动,电缸和气缸在损坏后更换成本高。
技术实现思路
1、本实用新型的目的在于提供一种新型自动焊钳,通过同步带、配合丝杆实现第二电极的移动,降低了成本。
2、为实现上述目的,本实用新型提供如下技术方案:
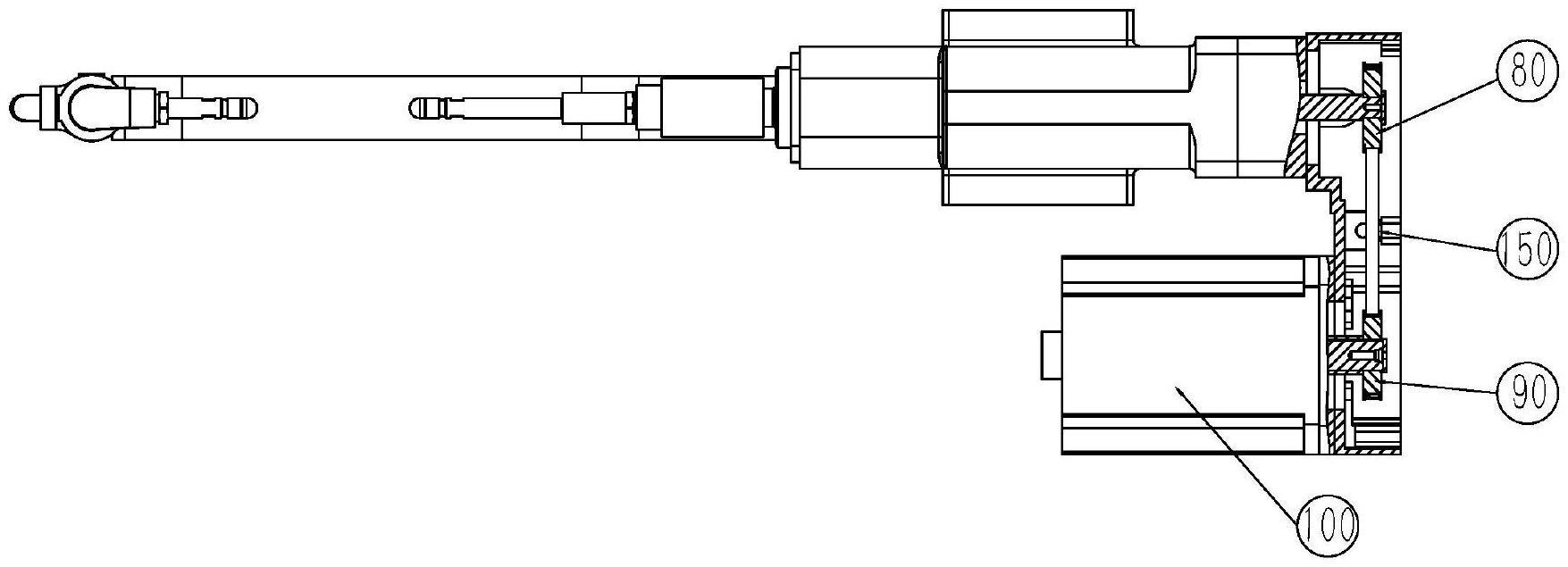
3、一种新型自动焊钳,其特征在于,包括焊钳本体以及钳臂,所述钳臂固定在所述焊钳本体上,所述钳臂的一端设置有第一电极,所述焊钳本体上设置有第二电极,所述第一电极和第二电极对中设置,所述第二电极连接有驱动轴,所述驱动轴内设置有丝杆,所述丝杆与所述驱动轴之间设置有旋转螺母,所述旋转螺母带动驱动轴移动并使得第二电极向第一电极一侧移动,所述丝杆连接有同步轮一,所述同步轮一连接通过皮带连接有同步轮二,所述同步轮二连接有同步电机,所述同步电机设置在电机固定板上,所述电机固定板固定在所述焊钳本体的一侧。
4、本实用新型进一步设置,所述驱动轴的一侧还设置有导向轴,所述导向轴与所述驱动轴之间通过连接板连接,所述驱动轴移动时所述导向轴与其同向移动。
5、本实用新型进一步设置,所述第一电极与所述钳臂之间通过转接管连接,所述转接管为弯管,所述第一电极包括转接杆、螺母套以及第一电极帽,所述转接杆通过所述螺母套与所述转接管连接,所述第一电极帽设置在转接杆的端部。
6、本实用新型进一步设置,所述第二电极包括电极杆、电极握杆、电极臂以及第二电极帽,所述电极握杆与所述驱动轴连接,所述电极臂与所述电极握杆连接,所述电极杆与所述电极臂连接,所述第二电极帽位于所述电极杆的端部,所述第一电极帽和第二电极帽正对设置。
7、本实用新型的有益效果:本实用新型中通过采用同步电机作用驱动源,配合同步带、丝杆以及旋转螺母,使得驱动轴能够带动第二电极移动,从而将第二电极和第一电极之间的焊件进行固定实现焊接,相比现有的电缸或者气缸能够有效地降低成本。同时设置了导向轴来保证驱动轴的定向移动时的导向效果。
技术特征:
1.一种新型自动焊钳,其特征在于,包括焊钳本体以及钳臂,所述钳臂固定在所述焊钳本体上,所述钳臂的一端设置有第一电极,所述焊钳本体上设置有第二电极,所述第一电极和第二电极对中设置,所述第二电极连接有驱动轴,所述驱动轴内设置有丝杆,所述丝杆与所述驱动轴之间设置有旋转螺母,所述旋转螺母带动驱动轴移动并使得第二电极向第一电极一侧移动,所述丝杆连接有同步轮一,所述同步轮一连接通过皮带连接有同步轮二,所述同步轮二连接有同步电机,所述同步电机设置在电机固定板上,所述电机固定板固定在所述焊钳本体的一侧。
2.根据权利要求1所述的一种新型自动焊钳,其特征在于,所述驱动轴的一侧还设置有导向轴,所述导向轴与所述驱动轴之间通过连接板连接,所述驱动轴移动时所述导向轴与其同向移动。
3.根据权利要求2所述的一种新型自动焊钳,其特征在于,所述第一电极与所述钳臂之间通过转接管连接,所述转接管为弯管,所述第一电极包括转接杆、螺母套以及第一电极帽,所述转接杆通过所述螺母套与所述转接管连接,所述第一电极帽设置在转接杆的端部。
4.根据权利要求3所述的一种新型自动焊钳,其特征在于,所述第二电极包括电极杆、电极握杆、电极臂以及第二电极帽,所述电极握杆与所述驱动轴连接,所述电极臂与所述电极握杆连接,所述电极杆与所述电极臂连接,所述第二电极帽位于所述电极杆的端部,所述第一电极帽和第二电极帽正对设置。
技术总结
本技术为一种新型自动焊钳,包括焊钳本体以及钳臂,钳臂固定在所述焊钳本体上,钳臂的一端设置有第一电极,焊钳本体上设置有第二电极,所述第一电极和第二电极对中设置,第二电极连接有驱动轴,所述驱动轴内设置有丝杆,所述丝杆与所述驱动轴之间设置有旋转螺母,所述旋转螺母带动驱动轴移动并使得第二电极向第一电极一侧移动,所述丝杆连接有同步轮一,所述同步轮一连接通过皮带连接有同步轮二,所述同步轮二连接有同步电机。本技术中通过采用同步电机作用驱动源,配合同步带、丝杆以及旋转螺母,使得驱动轴能够带动第二电极移动,从而将第二电极和第一电极之间的焊件进行固定实现焊接,相比现有的电缸或者气缸能够有效地降低成本。
技术研发人员:李绍军,熊小兵
受保护的技术使用者:乐清市浙南焊钳制造有限公司
技术研发日:20230227
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!