一种水下破障装置的制作方法
本技术涉及水下清理,更具体地说,涉及一种水下破障装置。
背景技术:
1、在水下在遇到缠绕物等障碍时,需要进行破障作业,工作人员能够进行水下进行线缆切割,清理船舶螺旋桨缠绕物,破除码头水下部分障碍物等多种功能作业。
2、现有技术中大部分工作人员进行水下切割破障作业的工具是液压剪,然而液压剪在剪切线缆时对线缆直径及线缆硬度等都有一定限制,如果线缆直径过大,线缆硬度过硬,或者液压剪功率不够,都难以实现线缆的切割。并且液压剪在使用时也容易出现线缆夹入剪刀片中,剪刀片无法张开的问题,此时还需要潜水员进行水下排除故障。另外剪切片刀口磨损后更换困难。这样不仅增加工作人员的作业负担,而且难以保证工作人员在水下作业的安全性。
3、综上所述,如何提供一种能够在地面遥控操作的水下破障装置,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本实用新型的目的是提供一种水下破障装置,该水下破障装置可以在地面遥控操作,能够高效安全地作业。
2、为了实现上述目的,本实用新型提供如下技术方案:
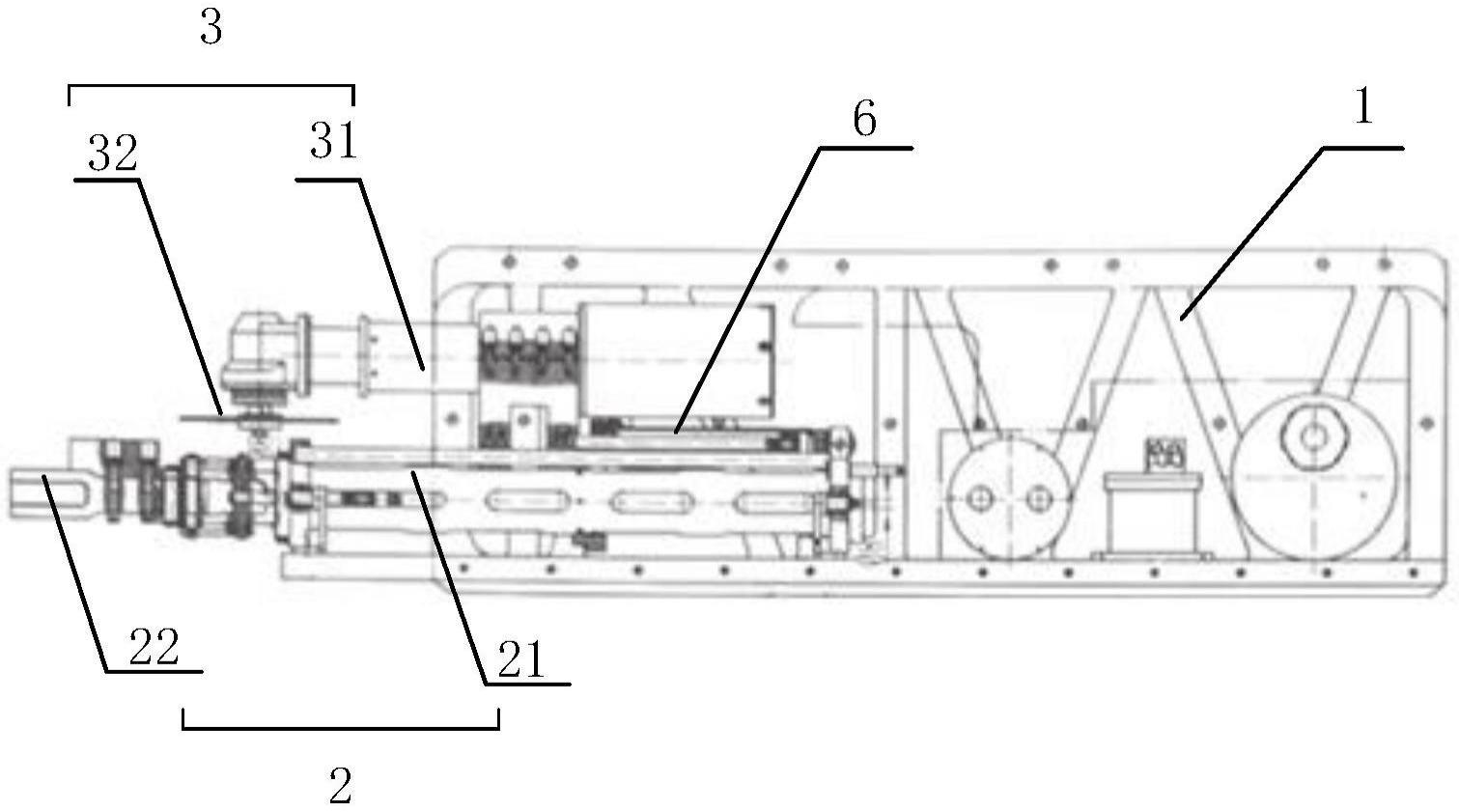
3、一种水下破障装置,设于水下机器人平台,包括:防撞框架,设为镂空的框架结构;机械臂模块,包括机械臂和卡爪,机械臂的一端固定设于防撞框架内,机械臂的另一端设有卡爪且可活动地设于防撞框架外,卡爪做张开闭合运动用于夹持固定障碍物;切割模块,包括第一液压传动机构和切割片,第一液压传动机构的一端固定设于机械臂模块的顶面,第一液压传动机构的另一端可活动地设于防撞框架外,第一液压传动机构的活动端沿竖直方向设有切割片,切割片做旋转运动用于切割障碍物。
4、一种水下破障装置,机械臂模块还包括用于驱动机械臂完成旋转、伸缩运动,以及用于驱动卡爪完成张开闭合运动的第二液压传动机构。
5、一种水下破障装置,还包括水密舱,水密舱的外壁与防撞框架的内壁固定连接。
6、一种水下破障装置,水密舱内设有液压控制机构,液压控制机构用于控制驱动第一液压传动机构和第二液压传动机构。
7、一种水下破障装置,水密舱内设有电器仓,电器仓内设有电路板,用于控制液压控制机构。
8、一种水下破障装置,液压控制机构和电器仓的两端均套设有喉箍,喉箍固定连接在水密舱的底面。
9、一种水下破障装置,水密舱内设有六联阀,六联阀设有与水下机器人平台连接的接口。
10、一种水下破障装置,水密舱的顶面设有浮力材料。
11、一种水下破障装置,机械臂模块的顶面和所述切割模块的底面之间设有夹持块。
12、一种水下破障装置,防撞框架包括侧板和底板,侧板设有两块分别沿竖直方向设于底板的两侧。
13、相对于背景技术,本实用新型所提供的水下破障装置,设于水下机器人平台,包括:防撞框架,设为镂空的框架结构;机械臂模块,包括机械臂和卡爪,机械臂的一端固定设于防撞框架内,机械臂的另一端设有卡爪且可活动地设于防撞框架外,卡爪做张开闭合运动用于夹持固定障碍物;切割模块,包括第一液压传动机构和切割片,第一液压传动机构的一端固定设于机械臂模块的顶面,第一液压传动机构的另一端可活动地设于防撞框架外,第一液压传动机构的活动端沿竖直方向设有切割片,切割片做旋转运动用于切割所述障碍物。
14、本实用新型所提供的水下破障装置能够安装在水下机器人平台上使用,通过机械臂模块和切割模块配合工作共同完成水下破障任务,卡爪设于机械臂的末端,机械臂能够完成伸缩和旋转运动,卡爪能够完成张开和闭合的运动,切割模块设置在机械臂模块的上方,能够随机械臂同步运动,切割片设置在第一液压传动机构的末端,第一液压传动机构能够完成伸缩运动,切割片能够完成旋转运动。当遇到障碍线缆时,机械臂能够旋转伸缩带动卡爪移动到合适的位置,卡爪能够闭合夹持固定线缆,切割片能够切割线缆,第一液压传动机构能够按照一定的速度带动切割片均匀移动,直到完成切割。防撞框架能够保护机械臂模块和切割模块,避免受到冲击,防撞框架设为镂空结构,能够减轻防撞框架的重量,进而降低能耗。
15、这样水下破障装置能够代替人员进行长时间水下障碍线缆切割的破除作业,其工作效率高,不仅能够减轻人员作业负担,还提高了水下作业的安全性,并且机械臂模块能够根据障碍物的硬度和直径调整切割速度,切割精度高,减少切割片的损坏,同时切割片的更换便捷,维护简单,经济效益好。
16、另外,本实用新型所提供的水下破障装置能够将切割模块拆卸后,单独使用机械臂模块完成夹持作业,该装置灵活多用,应用范围广。
技术特征:
1.一种水下破障装置,其特征在于,设于水下机器人平台(01),包括:
2.根据权利要求1所述的水下破障装置,其特征在于,所述机械臂模块(2)还包括用于驱动所述机械臂(21)完成旋转、伸缩运动,以及用于驱动所述卡爪(22)完成张开闭合运动的第二液压传动机构(23)。
3.根据权利要求2所述的水下破障装置,其特征在于,还包括水密舱(4),所述水密舱(4)的外壁与所述防撞框架(1)的内壁固定连接。
4.根据权利要求3所述的水下破障装置,其特征在于,所述水密舱(4)内设有液压控制机构(41),所述液压控制机构(41)用于控制驱动所述第一液压传动机构(31)和所述第二液压传动机构(23)。
5.根据权利要求4所述的水下破障装置,其特征在于,所述水密舱(4)内设有电器仓(42),所述电器仓(42)内设有电路板,用于控制所述液压控制机构(41)。
6.根据权利要求5所述的水下破障装置,其特征在于,所述液压控制机构(41)和所述电器仓(42)的两端均套设有喉箍(5),所述喉箍(5)固定连接在所述水密舱(4)的底面。
7.根据权利要求3所述的水下破障装置,其特征在于,所述水密舱(4)内设有六联阀(43),所述六联阀(43)设有与所述水下机器人平台(01)连接的接口。
8.根据权利要求3所述的水下破障装置,其特征在于,所述水密舱(4)的顶面设有浮力材料。
9.根据权利要求1所述的水下破障装置,其特征在于,所述机械臂模块(2)的顶面和所述切割模块(3)的底面之间设有夹持块(6)。
10.根据权利要求1所述的水下破障装置,其特征在于,所述防撞框架(1)包括侧板(11)和底板(12),所述侧板(11)设有两块分别沿竖直方向设于所述底板(12)的两侧。
技术总结
本申请公开了一种水下破障装置,设于水下机器人平台,包括:防撞框架,设为镂空的框架结构;机械臂模块,包括机械臂和卡爪,机械臂的一端固定设于防撞框架内,机械臂的另一端设有卡爪且可活动地设于防撞框架外,卡爪用于夹持固定障碍物;切割模块,包括第一液压传动机构和切割片,第一液压传动机构的一端固定设于机械臂模块的顶面,第一液压传动机构的另一端可活动地设于防撞框架外,第一液压传动机构的活动端沿竖直方向设有用于切割障碍物的切割片。上述水下破障装置能够代替人员进行长时间水下障碍线缆切割的破除作业,其工作效率高,不仅能够减轻人员作业负担,还提高了水下作业的安全性,同时切割片的更换便捷,维护简单。
技术研发人员:齐万江,夏吉修,韩学军,陶哲文
受保护的技术使用者:寿光正润机械有限公司
技术研发日:20230302
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!