一种螺母自动焊接用拾取装置的制作方法
本技术涉及自动焊接,特别涉及一种螺母自动焊接用拾取装置。
背景技术:
1、螺母焊接是汽车白车身板件焊接生产的重要部分,自动化焊接时因为对焊缝质量要求较高,需要在焊接过程中对产品的焊接位置进行调整,而现有技术中,需要人工手动调整产品焊接位置,容易造成螺母焊接不良和焊接错误、漏焊的质量隐患,操作不方便,而且工作效率也不高。
技术实现思路
1、本实用新型的目的在于提供一种螺母自动焊接用拾取装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
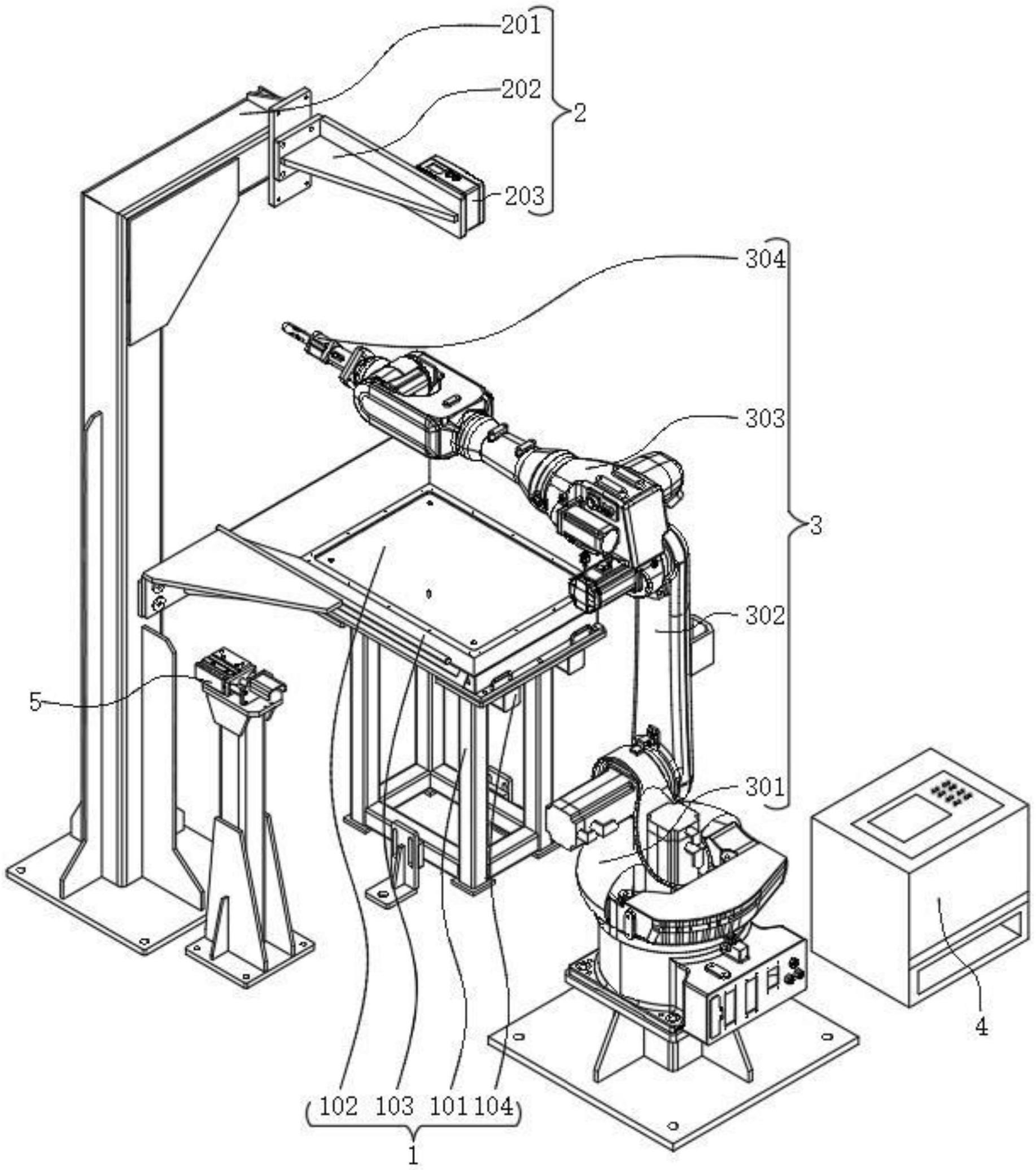
3、一种螺母自动焊接用拾取装置,包括振动平台,其中振动平台一侧设有视觉定位组件;所述振动平台前端设有上料机器人,其中上料机器人的机械臂可延伸至振动平台上方;所述上料机器人一侧设有plc控制器,其中plc控制器分别与视觉定位组件和上料机器人电性连接。
4、优选地,所述振动平台包括机架和设置在机架上方的柔性振动盘,其中柔性振动盘周边设有边框。
5、优选地,所述视觉定位组件包括支撑架,其中支撑架底部与地面固定连接;所述支撑架上端设有连接板,其中连接板设置在柔性振动盘上方。
6、优选地,所述连接板一端与支撑架固定连接,其中连接板另一端固定安装有3d视觉相机;所述3d视觉相机的摄像头与柔性振动盘上表面相对应,其中3d视觉相机与plc控制器电性连接。
7、优选地,所述上料机器人包括旋转底座、转臂和支撑臂,其中转臂下端与旋转底座连接;所述支撑臂一端与转臂上端连接,其中支撑臂另一端延伸至柔性振动盘上方,该支撑臂上设有抓手。
8、优选地,所述振动平台一侧设有检测相机,其中检测相机与plc控制器电性连接。
9、与现有技术相比,本实用新型的有益效果:本实用新型通过传输带将产品输送至振动平台内,使振动平台上方的柔性振动盘带动产品振动并平铺在振动盘表面,通过plc控制器控制3d视觉相机获取柔性振动盘内产品的图像信息,并将获取的图像信息反馈至plc控制器内,其中plc控制器将输入的产品图像信息处理成坐标信息,并将坐标信息发送至上料机器人,上料机器人接收坐标信息并处理,便于上料机器人精准抓取柔性振动盘上的产品,并将抓取的产品移动至检测相机处,通过检测相机记录产品精确位置,然后将产品送入下一个工序,通过3d视觉相机和检测相机的配合使用,无需人工手动调校,保证后续的焊接质量,提高工作效率。
技术特征:
1.一种螺母自动焊接用拾取装置,包括振动平台(1),其特征在于,所述振动平台(1)一侧设有视觉定位组件(2);所述振动平台(1)前端设有上料机器人(3),其中上料机器人(3)的机械臂可延伸至振动平台(1)上方;所述上料机器人(3)一侧设有plc控制器(4),其中plc控制器(4)分别与视觉定位组件(2)和上料机器人(3)电性连接。
2.根据权利要求1所述的一种螺母自动焊接用拾取装置,其特征在于,所述振动平台(1)包括机架(101)和设置在机架(101)上方的柔性振动盘(102),其中柔性振动盘(102)周边设有边框(103)。
3.根据权利要求1所述的一种螺母自动焊接用拾取装置,其特征在于,所述视觉定位组件(2)包括支撑架(201),其中支撑架(201)上端设有连接板(202),该连接板(202)设置在柔性振动盘(102)上方。
4.根据权利要求3所述的一种螺母自动焊接用拾取装置,其特征在于,所述连接板(202)一端与支撑架(201)固定连接,其中连接板(202)另一端固定安装有3d视觉相机(203);所述3d视觉相机(203)的摄像头与柔性振动盘(102)上表面相对应;所述3d视觉相机(203)与plc控制器(4)电性连接。
5.根据权利要求1所述的一种螺母自动焊接用拾取装置,其特征在于,所述上料机器人(3)包括旋转底座(301)、转臂(302)和支撑臂(303),其中转臂(302)下端与旋转底座(301)连接;所述支撑臂(303)一端与转臂(302)上端连接,其中支撑臂(303)另一端延伸至柔性振动盘(102)上方,该支撑臂(303)上设有抓手(304)。
6.根据权利要求1所述的一种螺母自动焊接用拾取装置,其特征在于,所述振动平台(1)一侧设有检测相机(5),其中检测相机(5)与plc控制器(4)电性连接。
技术总结
本技术公开了一种螺母自动焊接用拾取装置,包括振动平台,其中振动平台一侧设有视觉定位组件;所述振动平台前端设有上料机器人;所述上料机器人一侧设有PLC控制器,其中PLC控制器分别与视觉定位组件和上料机器人电性连接。本技术通过柔性振动盘带动产品产生振动并平铺在振动盘表面,通过PLC控制器控制3D视觉相机获取产品的图像信息,并将获取的图像信息处理成坐标信息,然后将坐标信息发送至上料机器人,使上料机器人精准抓取柔性振动盘上的产品,并将抓取的产品移动至检测相机处记录产品精确位置,通过3D视觉相机和检测相机的配合使用,无需人工手动调校,保证后续的焊接质量,提高工作效率。
技术研发人员:文祥,陈琪
受保护的技术使用者:武汉鹰革精密科技有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!