一体化清根机器人的制作方法
本申请涉及焊接,尤其是涉及一种一体化清根机器人。
背景技术:
1、目前,现有的清根机器人多为等离子清根机器人,这类清根机器人系统通常由机器人的本体、控制柜、割炬、气刨电源、气源等部件组成,系统组成多,转运不变、线缆繁杂等问题,无法适应复杂现场环境工况。
技术实现思路
1、本申请的目的在于提供一种一体化清根机器人,以在一定程度上解决现有技术中存在的清根机器人的线缆繁杂,难以适应复杂作业现场的技术问题。
2、本申请提供了一种一体化清根机器人,包括:车体;
3、行走机构,所述行走机构设置于所述车体的底部;
4、电气组件,所述电气组件设置于所述车体内;所述电气组件与所述行走机构连接;
5、通信组件,所述通信组件设置于所述车体,所述电气组件与所述通信组件相连接;所述电气组件通过所述通信组件与设置于所述车体以外的终端设备无线连接;
6、执行机构,所述执行机构设置于所述车。
7、在上述技术方案中,进一步地,所述行走机构包括:
8、第一驱动件;
9、第一车轮组,所述第一驱动件与所述第一车轮组连接;
10、第二驱动件,所述第二驱动件与所述第一驱动件错位排布;
11、第二车轮组,所述第二驱动件与所述第二车轮组连接。
12、在上述任一技术方案中,进一步地,所述执行机构包括:
13、第一传动组件,所述第一传动组件设置于所述车体内,所述第一传动组件包括第三驱动件和与所述第三驱动件连接的推杆,所述推杆延伸至所述车体以外;所述第三驱动件能够驱动所述推杆沿第一方向运动;
14、第二传动组件,所述第二传动组件包括第四驱动件和夹持件,所述夹持件通过连接组件与所述第四驱动件转动连接,所述夹持件用于夹持气刨枪;
15、所述第四驱动件与所述推杆位于所述车体外部的部分连接,所述第四驱动件能够驱动所述夹持件沿与所述第一方向不同的第二方向运动。
16、在上述任一技术方案中,进一步地,所述电气组件至少包括:
17、主控板;
18、多个驱动器,所述第一驱动件、所述第二驱动件、所述第三驱动件和所述第四驱动件分别连接有对应的所述驱动器;
19、多个所述驱动器沿同一直线顺次排布,任意相邻的两个所述驱动器之间均设置有金属防护罩;
20、所述主控板与多个所述驱动器间隔设置,所述主控板与多个所述驱动器之间设置有另一个所述金属防护罩。
21、在上述任一技术方案中,进一步地,所述车体包括:
22、底盘,所述行走机构设置于所述底盘的底部;
23、围板,所述围板设置于所述底盘;
24、盖板,盖设在所述围板的上端开口。
25、在上述任一技术方案中,进一步地,所述通信组件包括:
26、遥控信号处理器,所述遥控信号处理器设置于所述车体内;
27、天线,所述天线设置于所述车体,所述天线与所述遥控信号处理器连接。
28、在上述任一技术方案中,进一步地,所述一体化清根机器人还包括散热组件,所述围板包括多个侧板,至少一个所述侧板的外板面设置有所述散热组件;
29、所述电气组件在所述车体内设置于所述散热组件的一侧。
30、在上述任一技术方案中,进一步地,所述气刨枪具有割嘴,所述割嘴形成有喷口,所述喷口具有水滴形结构,所述喷口包括第一弧形段和第二弧形段,所述第一弧形段的弧形半径小于所述第二弧形段的弧形半径。
31、在上述任一技术方案中,进一步地,所述割嘴的侧壁包括第一侧壁部和第二侧壁部,所述第一弧形段对应的所述割嘴的部分侧壁为所述第一侧壁部,所述第二弧形段对应的所述割嘴的部分侧壁为所述第二侧壁部,所述第一侧壁部的厚度大于所述第二侧壁部的厚度。
32、在上述任一技术方案中,进一步地,所述一体化清根机器人还包括柔性线缆夹持构件,所述柔性线缆夹持构件设置于所述车体。
33、与现有技术相比,本申请的有益效果为:
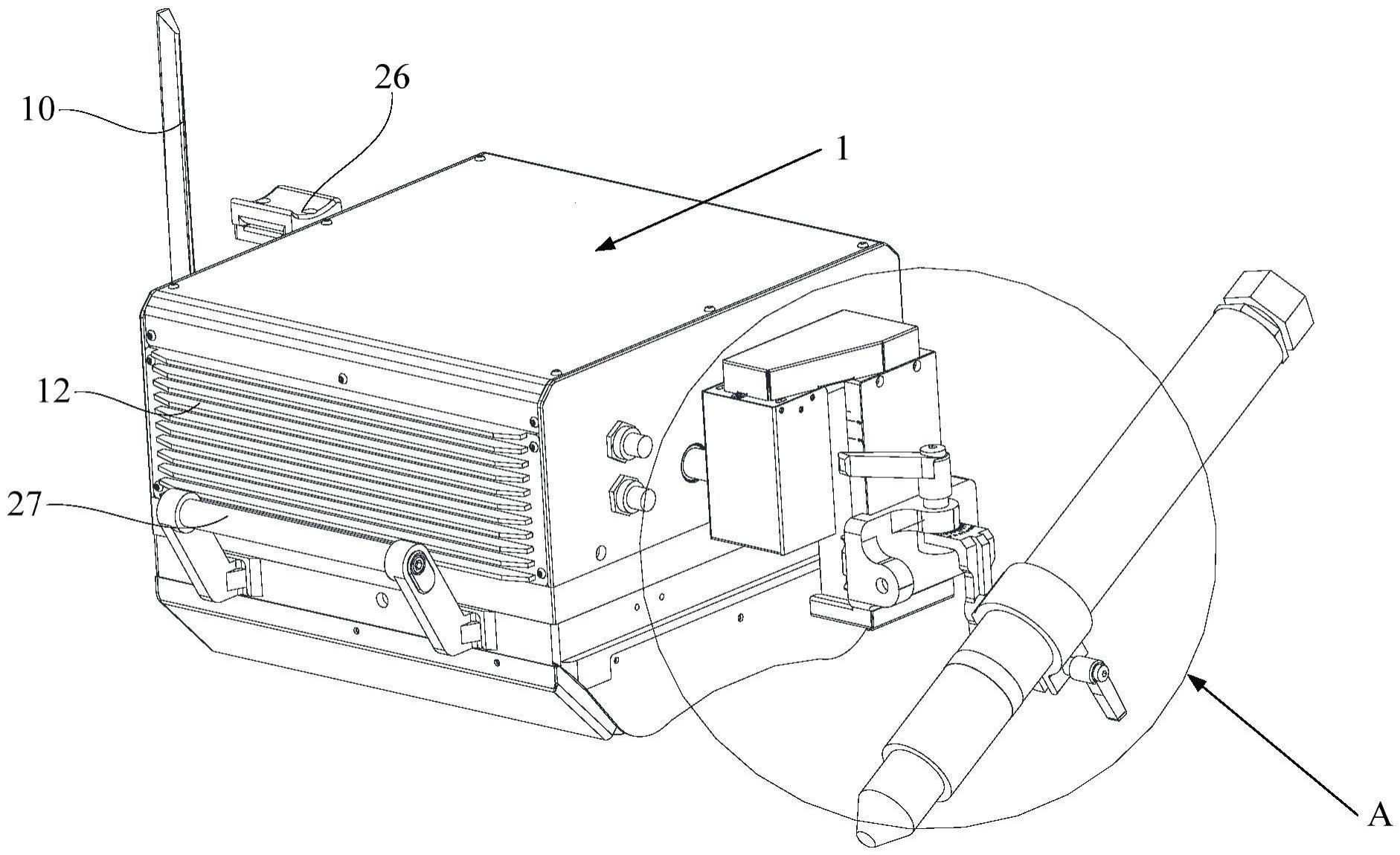
34、本申请提供的一体化清根机器人包括:车体;行走机构,行走机构设置于车体的底部;电气组件,电气组件设置于车体内;电气组件与行走机构连接;通信组件,通信组件设置于车体,电气组件与通信组件相连接;电气组件通过通信组件与设置于车体以外的终端设备无线连接;执行机构,执行机构设置于车体。
35、本申请提供的一体化清根机器人,将电气组件所包含的必要电子器件均设置于车体内,并在车体内完成连接,省去大量外接信号线缆,不需要对机器人专门配置控制柜,有效解决了本一体化清根机器人工作过程中拖线复杂问题,提高本一体化清根机器人在复杂工况下的适应能力。
技术特征:
1.一种一体化清根机器人,其特征在于,包括:
2.根据权利要求1所述的一体化清根机器人,其特征在于,所述行走机构包括:
3.根据权利要求2所述的一体化清根机器人,其特征在于;所述执行机构包括:
4.根据权利要求3所述的一体化清根机器人,其特征在于,所述电气组件至少包括:
5.根据权利要求1所述的一体化清根机器人,其特征在于,所述车体包括:
6.根据权利要求1所述的一体化清根机器人,其特征在于,所述通信组件包括:
7.根据权利要求5所述的一体化清根机器人,其特征在于,所述一体化清根机器人还包括散热组件,所述围板包括多个侧板,至少一个所述侧板的外板面设置有所述散热组件;
8.根据权利要求3所述的一体化清根机器人,其特征在于,所述气刨枪具有割嘴,所述割嘴形成有喷口,所述喷口具有水滴形结构,所述喷口包括第一弧形段和第二弧形段,所述第一弧形段的弧形半径小于所述第二弧形段的弧形半径。
9.根据权利要求8所述的一体化清根机器人,其特征在于,所述割嘴的侧壁包括第一侧壁部和第二侧壁部,所述第一弧形段对应的所述割嘴的部分侧壁为所述第一侧壁部,所述第二弧形段对应的所述割嘴的部分侧壁为所述第二侧壁部,所述第一侧壁部的厚度大于所述第二侧壁部的厚度。
10.根据权利要求1至9中任一项所述的一体化清根机器人,其特征在于,所述一体化清根机器人还包括柔性线缆夹持构件,所述柔性线缆夹持构件设置于所述车体。
技术总结
本申请涉及焊接技术领域,尤其是涉及一种一体化清根机器人,一体化清根机器人包括:车体;行走机构,行走机构设置于车体的底部;电气组件,电气组件设置于车体内;电气组件与行走机构连接;通信组件,通信组件设置于车体,电气组件与通信组件相连接;电气组件通过通信组件与设置于车体以外的终端设备无线连接;执行机构,设置于车体。本申请提供的一体化清根机器人,将电气组件所包含的必要电子器件均设置于车体内,并在车体内完成连接,省去大量外接信号线缆,不需要对机器人专门配置控制柜,有效解决了本一体化清根机器人工作过程中拖线复杂问题,提高本一体化清根机器人在复杂工况下的适应能力。
技术研发人员:冯消冰,袁俊强,魏然
受保护的技术使用者:北京博清科技有限公司
技术研发日:20230324
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!