一种锻压搬运的机械手的制作方法
本技术涉及机械手,具体来说涉及一种锻压搬运的机械手。
背景技术:
1、机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,在轴承环锻压车间中常使用机械手以对锻压成形的轴承环进行抓取下料。
2、根据公开号cn204108210u,公开(公告)日:2015.01.21,公开的及一种自动化机械手。锻压件上下料机械手,包括手臂和手爪;所述手爪固连于所述手臂的一端;所述手臂包括底板、丝杠、长导轨、方形滑块、螺母、伺服电机、联轴器;所述丝杠的一端活动连接有丝杠固定座、另外一端活动连接有丝杠支撑座,所述丝杠固定座和所述丝杠支撑座固定连接于所述底板上;所述丝杠和所述长导轨相互平行;所述手爪,包括滑块模组和手指;所述手指固连于所述滑块;所述滑块模组包括:手指体、导轨、活塞、柱塞销、滑块。导轨式机械手适用于机械制造过程中,实现物料的搬运传输,并且摩擦阻力小,运行平稳、精度高、寿命长。同时,对高温工件做淬火处理。
3、包括上述的专利的现有技术中,常使用机械手以替代人工的重复劳作,在锻压车间使用时,现有的机械手使用两个机械手指相对远离以其二者胀紧于轴承环的内环,随后机械手移动搬运轴承环以进行下料,由于轴承环锻压成形时本体温度较高,当机械手指接触轴承环时容易被热磨损而损坏,且机械手指与机械手通过螺栓连接成一体,致使机械手指不便于拆装和快速更换。
技术实现思路
1、本实用新型的目的是提供一种锻压搬运的机械手,用于解决机械手指与机械手通过螺栓连接成一体,致使机械手指不便于拆装和快速更换的问题。
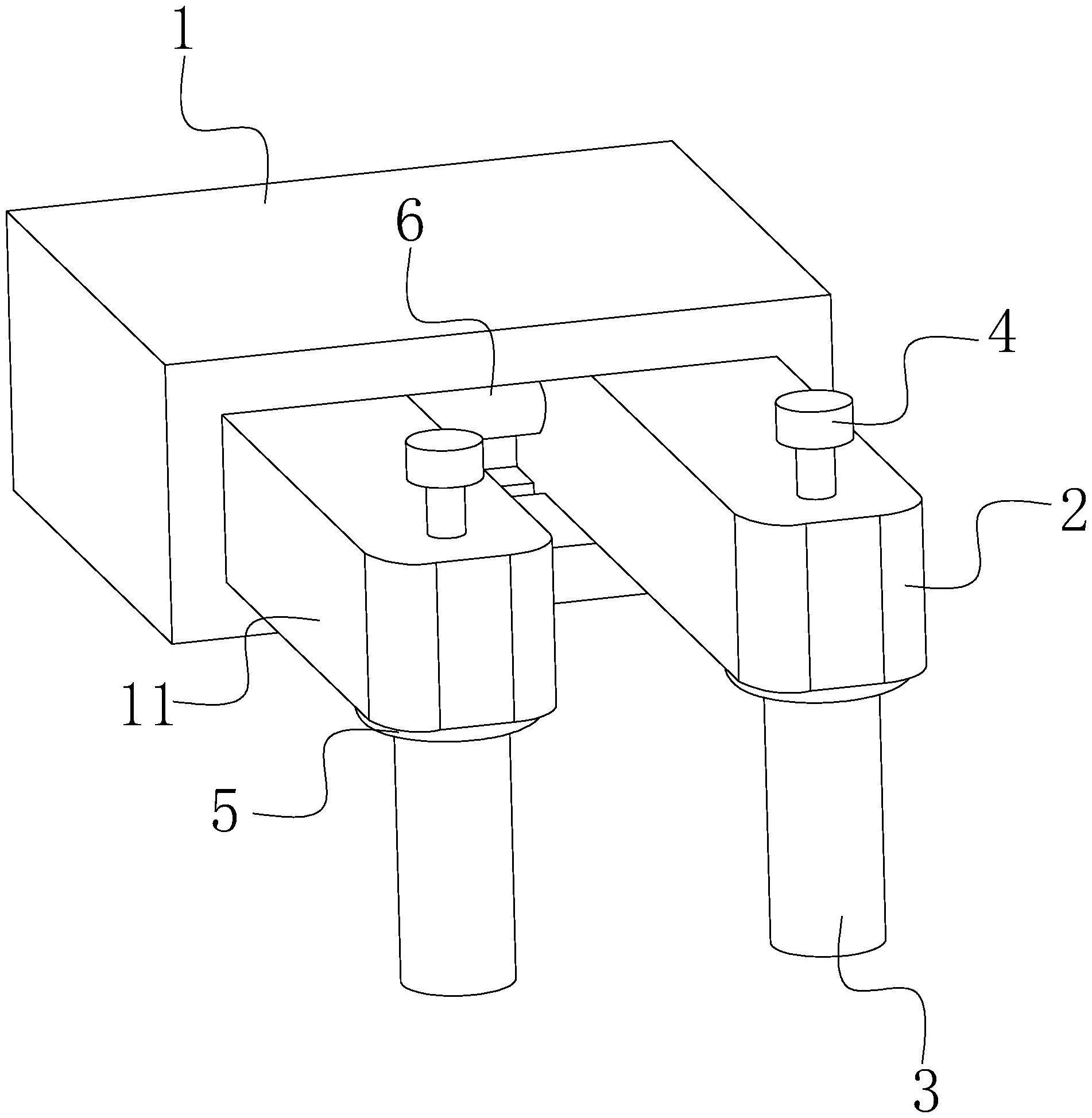
2、为了实现上述目的,本实用新型提供如下技术方案:一种锻压搬运的机械手,包括胀紧杆和用于安装至机械手末端的安装座,所述安装座上滑动设置有滑动爪,所述安装座上设置固定爪,所述固定爪和滑动爪上均开设有插入槽,所述插入槽内设置有均呈半球状的第一凸起部和第二凸起部,所述胀紧杆的第一端分别开设有呈环状的第一抵触槽和第二抵触槽,所述胀紧杆上还开设有第一连通槽和第二连通槽,所述第一抵触槽通过第一连通槽与胀紧杆的第一端相连通,所述第一抵触槽通过所述第二连通槽与第二抵触槽相连通,其中:
3、所述胀紧杆插入所述插入槽内使得所述第一凸起部和第二凸起部分别抵触于所述第一抵触槽和第二抵触槽内以锁止胀紧杆;
4、所述滑动爪受驱相对于固定爪滑动以使两个所述胀紧杆相对运动。
5、作为优选的,所述固定爪和滑动爪的第一侧面均固定连接有抵触件以使抵触件位于插入槽的外侧,所述抵触件呈环状,所述抵触件的横截面呈两个半圆形,所述抵触件环状弧面与所述插入槽内壁相切。
6、作为优选的,所述安装座内固定连接有用于驱使所述滑动爪滑动的伸缩缸。
7、作为优选的,所述固定爪和滑动爪上均螺纹连接有锁紧螺栓,所述锁紧螺栓的第一端位于所述插入槽内,所述锁紧螺栓受驱旋转使得其第一端抵推所述胀紧杆以使所述胀紧杆抵触所述第一凸起部和第二凸起部。
8、作为优选的,所述胀紧杆为钨钢件。
9、作为优选的,所述抵触件为耐高温橡胶件。
10、在上述技术方案中,本实用新型提供的一种锻压搬运的机械手,具备以下有益效果:利用固定爪和滑动爪上开设的插入槽及其内的第一凸起部和第二凸起部,当胀紧杆的第一端插入插入槽时,首先使第二凸起部沿第一连通槽进入胀紧杆的第一抵触槽,随后旋转胀紧杆以使第二凸起部与第二连通槽相对齐,第一凸起部与第一连通槽相对齐,随后继续将胀紧杆插入以使第二凸起部经过第二连通槽进入第二抵触槽内,第一凸起部经过第一连通槽进入第一抵触槽内,最后旋转胀紧杆以将第一凸起部与第一连通槽错开、第二凸起部与第二连通槽错开,此时胀紧杆由于受第一凸起部和第二凸起部的卡固抵触被竖直方向锁止以完成安装,即胀紧杆从不会插入槽内滑出脱离,利用第一凸起部和第二凸起部以不需要使用螺栓的情况下完成对胀紧杆的安装,避免了胀紧杆被磨损时不便于拆装和快速更换的问题。
技术特征:
1.一种锻压搬运的机械手,其特征在于,包括胀紧杆(3)和用于安装至机械手末端的安装座(1),所述安装座(1)上滑动设置有滑动爪(2),所述安装座(1)上设置固定爪(11),所述固定爪(11)和滑动爪(2)上均开设有插入槽(71),所述插入槽(71)内设置有均呈半球状的第一凸起部(72)和第二凸起部(73),所述胀紧杆(3)的第一端分别开设有呈环状的第一抵触槽(31)和第二抵触槽(32),所述胀紧杆(3)上还开设有第一连通槽(33)和第二连通槽(34),所述第一抵触槽(31)通过第一连通槽(33)与胀紧杆(3)的第一端相连通,所述第一抵触槽(31)通过所述第二连通槽(34)与第二抵触槽(32)相连通,其中:
2.根据权利要求1所述的一种锻压搬运的机械手,其特征在于,所述固定爪(11)和滑动爪(2)的第一侧面均固定连接有抵触件(5)以使抵触件(5)位于插入槽(71)的外侧,所述抵触件(5)呈环状,所述抵触件(5)的横截面呈两个半圆形,所述抵触件(5)环状弧面与所述插入槽(71)内壁相切。
3.根据权利要求1所述的一种锻压搬运的机械手,其特征在于,所述安装座(1)内固定连接有用于驱使所述滑动爪(2)滑动的伸缩缸(6)。
4.根据权利要求1所述的一种锻压搬运的机械手,其特征在于,所述固定爪(11)和滑动爪(2)上均螺纹连接有锁紧螺栓(4),所述锁紧螺栓(4)的第一端位于所述插入槽(71)内,所述锁紧螺栓(4)受驱旋转使得其第一端抵推所述胀紧杆(3)以使所述胀紧杆(3)抵触所述第一凸起部(72)和第二凸起部(73)。
5.根据权利要求1所述的一种锻压搬运的机械手,其特征在于,所述胀紧杆(3)为钨钢件。
6.根据权利要求2所述的一种锻压搬运的机械手,其特征在于,所述抵触件(5)为耐高温橡胶件。
技术总结
本技术公开了一种锻压搬运的机械手,一种锻压搬运的机械手,包括胀紧杆和安装座,安装座上滑动设置有滑动爪,安装座上设置固定爪,固定爪和滑动爪上均开设有插入槽,插入槽内设置有第一凸起部和第二凸起部,胀紧杆的第一端分别开设有第一抵触槽和第二抵触槽,胀紧杆上还开设有第一连通槽和第二连通槽,第一抵触槽通过第一连通槽与胀紧杆的第一端相连通,第一抵触槽通过第二连通槽与第二抵触槽相连通。该技术提供的锻压搬运的机械手,利用固定爪和滑动爪的插入槽内的第一凸起部和第二凸起部和张紧杆,在不需要使用螺栓的情况下完成对胀紧杆的安装,避免了胀紧杆被磨损时不便于拆装和快速更换的问题。
技术研发人员:谭广,薛荣强,裘晓龙,奉怀宇
受保护的技术使用者:杭州宏明精密机械有限公司
技术研发日:20230329
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!