柔性可调的末端执行机构和焊接机器人的制作方法
本技术涉及焊接机器人,特别涉及一种柔性可调的末端执行机构和焊接机器人。
背景技术:
1、焊接机器人是从事焊接的工业机器人。工业机器人是一种多用途的、可重复编程的自动控制操作机,用于工业自动化领域。焊接机器人上安装有焊枪,通过焊枪进行焊接加工,焊枪上安装有用于定位的相机。然而,现有的焊接机器人不能灵活调整焊枪和相机的位置。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种柔性可调的末端执行机构和焊接机器人,能够解决现有的焊接机器人不能灵活调整焊枪和相机的位置的问题。
2、根据本实用新型第一方面实施例的柔性可调的末端执行机构,包括:焊枪;夹持单元,所述夹持单元安装在所述焊接机器人上,所述夹持单元夹持所述焊枪;位置调节机构,所述位置调节机构安装在所述焊枪上;视觉单元,所述视觉单元安装在所述位置调节机构上。
3、根据本实用新型第一方面实施例的柔性可调的末端执行机构,至少具有如下有益效果:
4、通过调整夹持单元夹持焊枪的部位,能整体调节焊枪和视觉单元的位置,调整位置调节机构,能进一步调节视觉单元的位置。根据本实用新型实施例的柔性可调的末端执行机构相较于传统的焊接机器人,能够灵活调整焊枪和视觉单元的位置。
5、根据本实用新型的一些实施例,所述夹持单元包括限位件、夹持件和连接件,所述限位件和所述夹持件通过所述连接件安装在所述焊接机器人上,所述夹持件夹持所述焊枪,所述限位件用于限制焊枪的径向位移。
6、根据本实用新型的一些实施例,所述夹持件包括第一夹持部和第二夹持部,所述第一夹持部和所述第二夹持部对应设置在所述焊枪的两侧以用于夹持所述焊枪。
7、根据本实用新型的一些实施例,所述第一夹持部为第一夹持块,所述第二夹持部为第二夹持块,所述第一夹持块的一侧铰接所述第二夹持块的一侧,所述第一夹持块的另一侧卡接所述第二夹持块的另一侧。
8、根据本实用新型的一些实施例,所述连接件包括连接块和连接板,所述连接块安装在所述焊接机器人上,所述夹持件安装在所述连接块上,所述连接板安装在所述连接块上,所述限位件安装在所述连接板上。
9、根据本实用新型的一些实施例,所述位置调节机构包括第三夹持部、第四夹持部和滑块,所述第三夹持部和所述第四夹持部相对设置在所述焊枪的两侧以用于夹持所述焊枪,所述第四夹持部上设置有滑槽,所述滑槽与所述滑块大小相应,所述滑块安装在所述滑槽内,所述视觉单元安装在所述滑块上。
10、根据本实用新型的一些实施例,所述第三夹持部为第三夹持块,所述第四夹持部为第四夹持块,所述第三夹持块和所述第四夹持块通过第一螺丝互相连接。
11、根据本实用新型的一些实施例,所述滑槽和所述滑块通过第二螺丝互相连接。
12、根据本实用新型的一些实施例,还包括弧光挡板,所述弧光挡板安装在所述视觉单元上。
13、根据本实用新型第二方面实施例的焊接机器人,包括上述的柔性可调的末端执行机构。
14、根据本实用新型第二方面实施例的焊接机器人,至少具有如下有益效果:
15、通过调整夹持单元夹持焊枪的部位,能整体调节焊枪和视觉单元的位置,调整位置调节机构,能进一步调节视觉单元的位置。根据本实用新型实施例的焊接机器人相较于传统的焊接机器人,能够灵活调整焊枪和视觉单元的位置。
16、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.柔性可调的末端执行机构,应用于焊接机器人,其特征在于,包括:
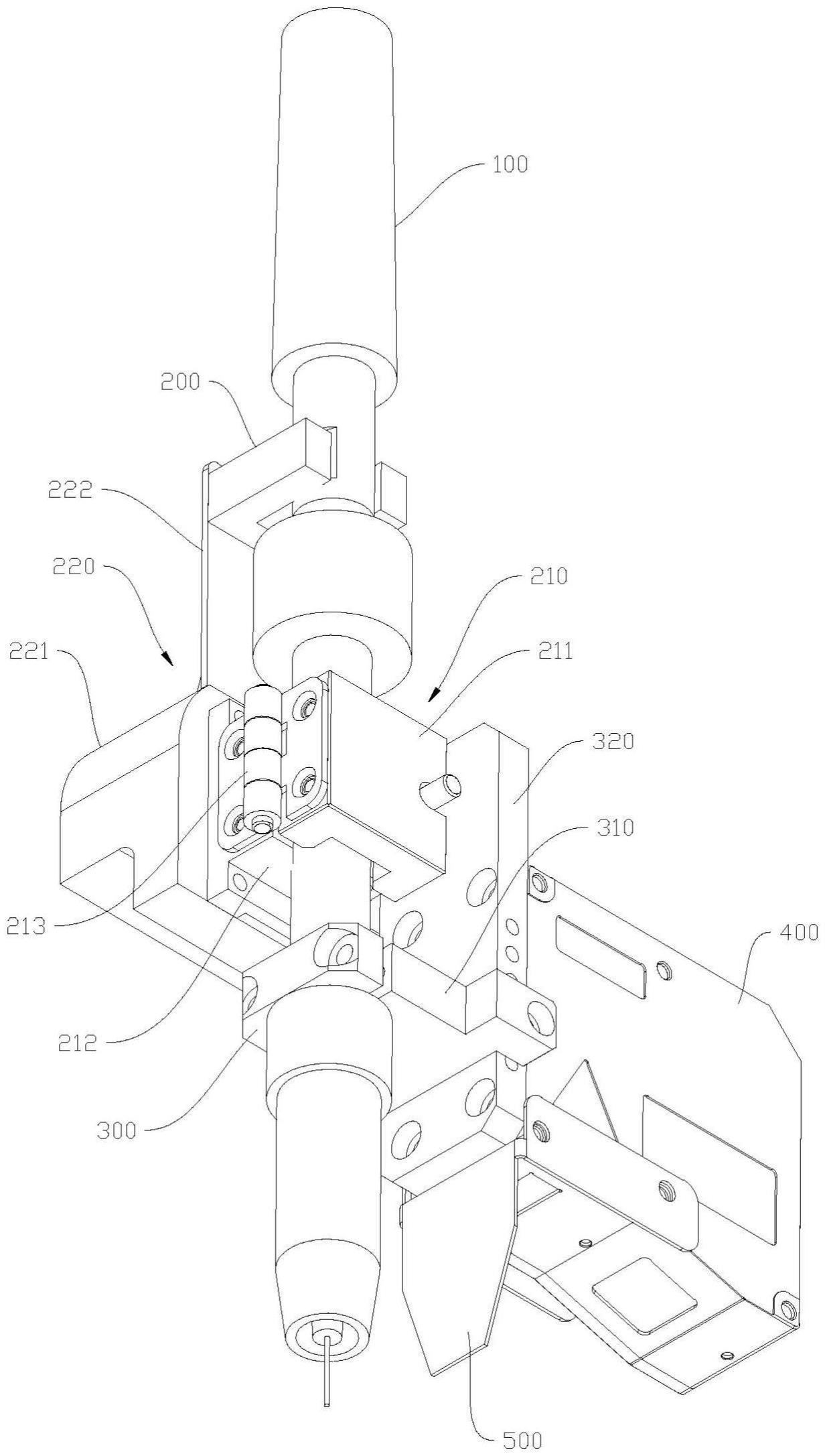
2.根据权利要求1所述的柔性可调的末端执行机构,其特征在于:所述夹持单元包括限位件(200)、夹持件(210)和连接件(220),所述限位件(200)和所述夹持件(210)通过所述连接件(220)安装在所述焊接机器人上,所述夹持件(210)夹持所述焊枪(100),所述限位件(200)用于限制焊枪(100)的径向位移。
3.根据权利要求2所述的柔性可调的末端执行机构,其特征在于:所述夹持件(210)包括第一夹持部(211)和第二夹持部(212),所述第一夹持部(211)和所述第二夹持部(212)对应设置在所述焊枪(100)的两侧以用于夹持所述焊枪(100)。
4.根据权利要求3所述的柔性可调的末端执行机构,其特征在于:所述第一夹持部(211)为第一夹持块,所述第二夹持部(212)为第二夹持块,所述第一夹持块的一侧铰接所述第二夹持块的一侧,所述第一夹持块的另一侧卡接所述第二夹持块的另一侧。
5.根据权利要求2所述的柔性可调的末端执行机构,其特征在于:所述连接件(220)包括连接块(221)和连接板(222),所述连接块(221)安装在所述焊接机器人上,所述夹持件(210)安装在所述连接块(221)上,所述连接板(222)安装在所述连接块(221)上,所述限位件(200)安装在所述连接板(222)上。
6.根据权利要求1所述的柔性可调的末端执行机构,其特征在于:所述位置调节机构包括第三夹持部(300)、第四夹持部(310)和滑块(320),所述第三夹持部(300)和所述第四夹持部(310)相对设置在所述焊枪(100)的两侧以用于夹持所述焊枪(100),所述第四夹持部(310)上设置有滑槽,所述滑槽与所述滑块(320)大小相应,所述滑块(320)安装在所述滑槽内,所述视觉单元安装在所述滑块(320)上。
7.根据权利要求6所述的柔性可调的末端执行机构,其特征在于:所述第三夹持部(300)为第三夹持块,所述第四夹持部(310)为第四夹持块,所述第三夹持块和所述第四夹持块通过第一螺丝互相连接。
8.根据权利要求6所述的柔性可调的末端执行机构,其特征在于:所述滑槽和所述滑块(320)通过第二螺丝互相连接。
9.根据权利要求1所述的柔性可调的末端执行机构,其特征在于:还包括弧光挡板(500),所述弧光挡板(500)安装在所述视觉单元上。
10.焊接机器人,其特征在于:包括权利要求1至9任意一项所述的柔性可调的末端执行机构。
技术总结
本技术公开了一种柔性可调的末端执行机构和焊接机器人,柔性可调的末端执行机构包括:焊枪、夹持单元、位置调节机构和视觉单元,夹持单元安装在焊接机器人上,夹持单元夹持焊枪,位置调节机构安装在焊枪上,视觉单元安装在位置调节机构上,通过调整夹持单元夹持焊枪的部位,能整体调节焊枪和视觉单元的位置,调整位置调节机构,能进一步调节视觉单元的位置。
技术研发人员:张燕鑫,刘国栋,陈春国,邓晓龙,黄潇,肖运通
受保护的技术使用者:中建钢构工程有限公司
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!