一种钢结构高空平稳焊接机器人的制作方法
本技术涉及焊接机器人,更具体地说,涉及一种钢结构高空平稳焊接机器人。
背景技术:
1、焊接涉及机械制造各个领域,在智能建造、钢结构安装等行业占有重要地位,使用人工操作焊接是一项繁重且危险的任务,随着钢铁行业技术的不断革新,对于焊接的需求也越来越多,建造行业需要进行高空焊接作业,活动空间小,任务量大,劳动强度较高,人工操作具有一定的危险性,大部分高空作业要求工人进行双面焊接钢梁,整个作业环境有一定的安全隐患,随着人工成本的不断增加,焊接行业对于自动化的焊接需求十分迫切,实现机器人代替人工完成焊接任务是社会发展的趋势。
2、现阶段,普通的高空焊接机器人在进行钢梁焊接时,存在不能长距离沿直线焊接的问题,影响了焊接机器人的安全性和实用性。且普通的高空焊接机器人在进行下表面焊接时会因为重心的下降,可能发生倾倒的危险。经检索,中国专利号zl 2022207576799,授权公告日为2022年7月19日,发明创造名称为:一种六自由度工业机器人;该申请案包括安装台和移动台,所述安装台的一侧固定连接有支撑座,支撑座的一侧固定安装有电机,所述电机的输出端固定连接有丝杆,丝杆的外表面螺纹连接有空心连接管。该申请案使得机器人在安装后结构不再是固定式的,能够根据实际情况来对六自由度工业机器人进行小范围和大范围的移动。但该申请案机器人只能在移动台上进行一定范围的移动,安装台还是固定不动的,因此,该申请案并不适用于高空钢梁焊接。
技术实现思路
1、1.实用新型要解决的技术问题
2、针对钢结构建造行业往往需要人工在高空进行焊接,具有一定的危险性的问题,本实用新型提供了一种钢结构高空平稳焊接机器人,本实用新型在进行高空焊接时,能够自动识别焊缝并进行长距离平稳准确的焊接。
3、2.技术方案
4、为达到上述目的,本实用新型提供的技术方案为:
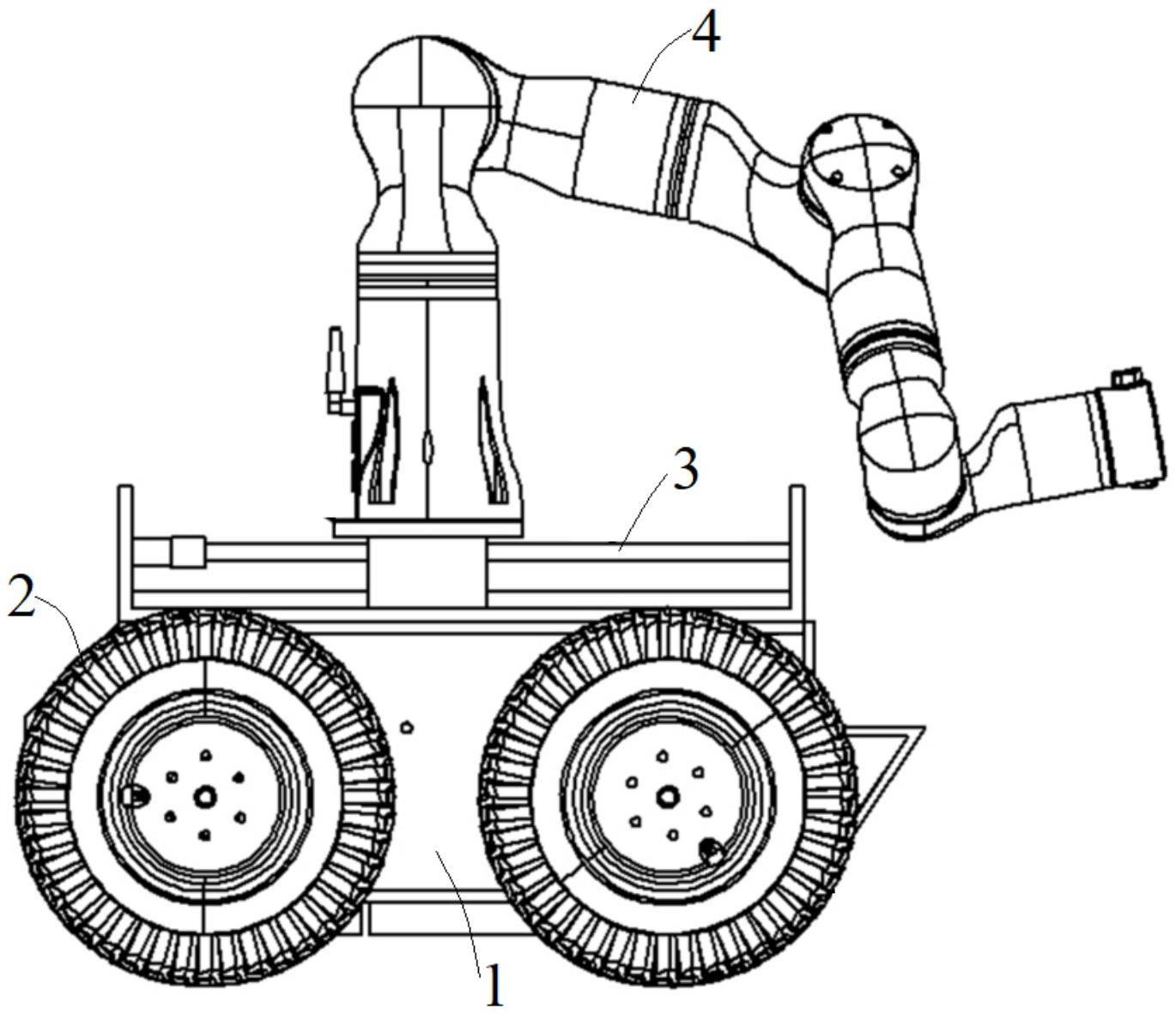
5、本实用新型的一种钢结构高空平稳焊接机器人,包括底盘、车轮、相机单元和焊枪,还包括滑动组件和机械臂,所述的滑动组件设置于底盘上,机械臂与滑动组件连接,滑动组件能够带动机械臂移动;所述的相机单元设于底盘上方,用于为车体提供导航和检测焊缝;所述的焊枪设置于机械臂一端,机械臂根据相机单元得到的信号控制焊枪进行焊接。
6、更进一步地,所述的滑动组件包括电机、导座、支撑座和丝杆,电机的输出端连接丝杆,电机驱动丝杆旋转,所述的支撑座连接导座,导座套于丝杆上,经丝杆驱动,导座带动支撑座移动,所述的机械臂设置于支撑座上,在丝杆进行移动时,机械臂保持平稳焊接。
7、更进一步地,所述的滑动组件还包括滑轨和导轨,导轨与丝杆平行设置,滑轨与支撑座连接,滑轨与导轨相配合,滑轨带动支撑座沿导轨移动。
8、更进一步地,所述的丝杆一端连接电机,另一端连接安装板,所述的相机单元安装于该安装板上。
9、更进一步地,所述的机械臂包括底座和多个依次连接的连接臂;所述底座固定在支撑座上,底座转动连接端部连接臂。
10、更进一步地,所述的机械臂包括依次连接的第一连接臂、第二连接臂、第三连接臂、第四连接臂、第五连接臂和第六连接臂;第一连接臂的底端通过第一转轴设于底座上;第二连接臂通过第二转轴与第一连接臂连接;第三连接臂通过第三转轴与第二连接臂连接;第四连接臂通过第四转轴与第三连接臂连接;第五连接臂通过第五转轴与第四连接臂连接;第六连接臂通过第六转轴与第五连接臂连接;第七转轴设于第六连接臂一端,焊枪设于第七转轴上。
11、更进一步地,第一连接臂与底座同轴设置;第二转轴与第一连接臂之间的夹角为90°,第三连接臂与第二连接臂同轴设置;第四转轴与第三连接臂之间的夹角为90°,第四连接臂与第五连接臂同轴设置;第六转轴与第五连接臂之间的夹角为90°,第七转轴与第六连接臂同轴设置。
12、更进一步地,所述的车轮采用麦克纳姆轮,底盘内部设置车轮的动力装置,车轮采用直流电机驱动。
13、更进一步地,所述的相机单元自带照明系统。
14、3.有益效果
15、采用本实用新型提供的技术方案,与已有的公知技术相比,具有如下有益效果:
16、(1)本实用新型的一种钢结构高空平稳焊接机器人,滑动组件设置于底盘上,机械臂与滑动组件连接,滑动组件能够带动机械臂移动,滑动组件中电机驱动丝杆旋转,利用丝杆的滑动距离和机械臂的自由延伸长度,保证了机器人长距离焊接,同时滑轨与导轨的配合,也能使机械臂移动保持平稳,弥补了小型移动焊接机器人焊接时不能保持长距离平稳焊接的缺点。
17、(2)本实用新型的一种钢结构高空平稳焊接机器人,其机械臂包括底座和多个依次连接的连接臂;连接臂之间通过转轴相连,通过对多个连接臂延伸方向的设置,使得整个机械臂在焊接过程中,重心适宜,不易发生倾倒。
技术特征:
1.一种钢结构高空平稳焊接机器人,包括底盘(1)、车轮(2)、相机单元和焊枪,其特征在于:还包括滑动组件(3)和机械臂(4),所述的滑动组件(3)设置于底盘(1)上,机械臂(4)与滑动组件(3)连接,滑动组件(3)能够带动机械臂(4)移动;所述的相机单元设于底盘(1)上方,用于为车体提供导航和检测焊缝;所述的焊枪设置于机械臂(4)一端;
2.根据权利要求1所述的一种钢结构高空平稳焊接机器人,其特征在于:所述的车轮(2)采用麦克纳姆轮,底盘(1)内部设置车轮(2)的动力装置,车轮(2)采用直流电机驱动。
3.根据权利要求2所述的一种钢结构高空平稳焊接机器人,其特征在于:所述的相机单元自带照明系统。
技术总结
本技术公开了一种钢结构高空平稳焊接机器人,属于机器人技术领域。本技术包括底盘、车轮、相机单元和焊枪,还包括滑动组件和机械臂,所述的滑动组件设置于底盘上,机械臂与滑动组件连接,滑动组件能够带动机械臂移动;所述的相机单元设于底盘上方,用于为车体提供导航和检测焊缝;所述的焊枪设置于机械臂一端,机械臂根据相机单元得到的信号控制焊枪进行焊接。本技术利用丝杆滑动装置和机械臂使焊枪能进行长距离水平焊接,同时能保证焊接时的平稳和准确,有利于焊接机器人长距离水平焊接的性能提升。
技术研发人员:金仁才,付金岗,钱元弟,宋江一,李丹,孔炯,房政,程安春
受保护的技术使用者:中国十七冶集团有限公司
技术研发日:20230412
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!