一种机器人焊枪调节装置的制作方法
本技术涉及机器人焊接,具体为一种机器人焊枪调节装置。
背景技术:
1、焊接是制造业中最重要的工艺技术之一,它的应用越来越广泛,传统手工焊接已不能满足现代高技术产品制造的质量、数量要求,因此,保证焊接端接器质量的稳定性、提高生产效率和改善劳动条件已成为现代焊接制造工艺发展亟待解决的问题。
2、机器人焊接时,在初始调试过程中,焊枪位姿是影响焊接质量的重要因素之一,现有的焊枪夹具一般为固定结构,连接之后不能调节焊枪位姿,往往需要通过调节机器人程序的方法来达到对焊枪位姿的调节,此法过于繁琐,在实际生产过程中不利于生产效率的提高。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种机器人焊枪调节装置,具备可多角度调节,且调节便捷等优点,解决了现有的焊枪夹具一般为固定结构,连接之后不能调节焊枪位姿,往往需要通过调节机器人程序的方法来达到对焊枪位姿的调节的问题。
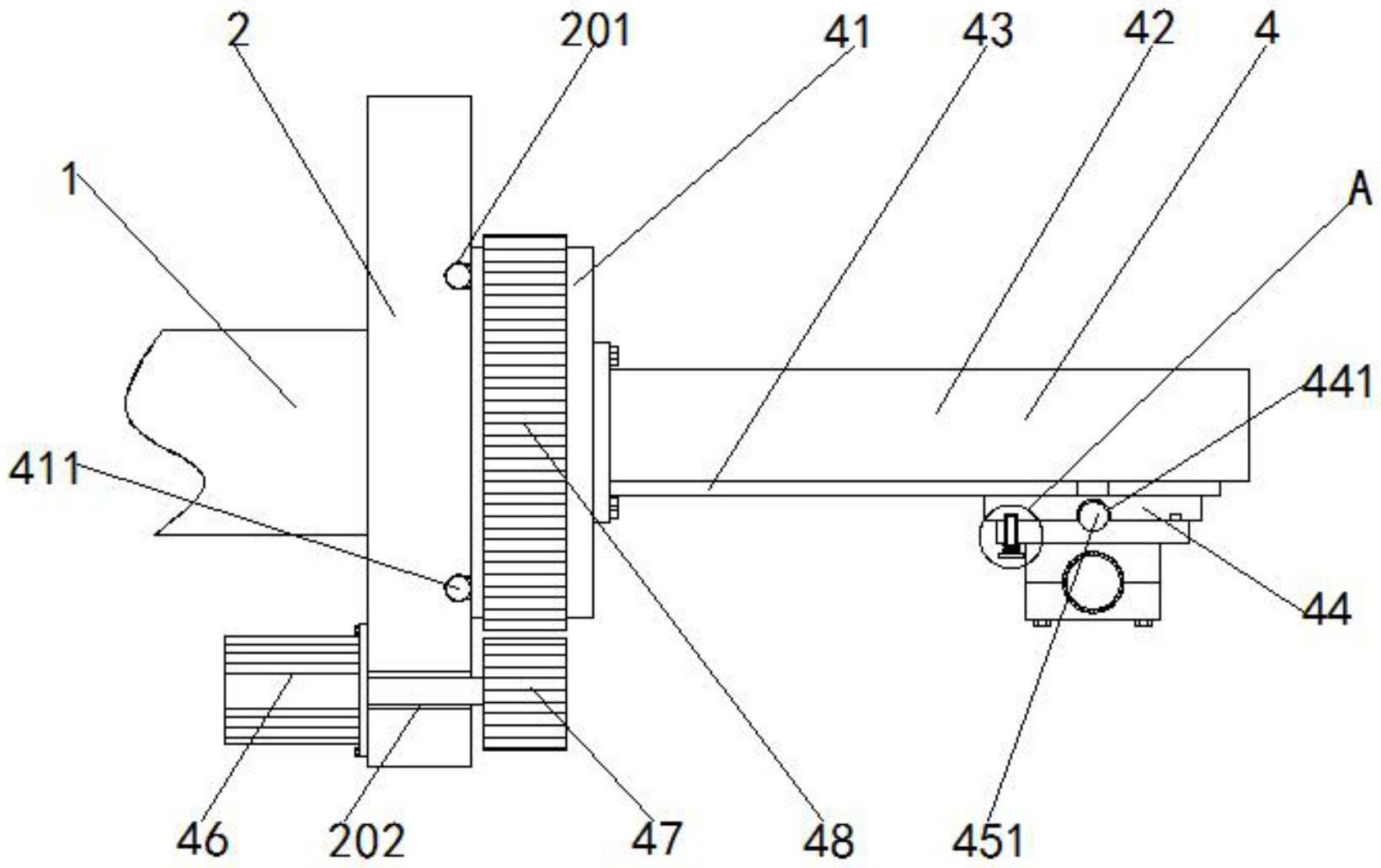
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人焊枪调节装置,包括机械臂,所述机械臂的右端固定连接有机械臂连接座,所述机械臂连接座上设置有焊枪夹座,所述焊枪夹座与机械臂连接座之间设置有调节组件,所述调节组件包括活动安装于机械臂连接座右端的转动座,转动座远离机械臂连接座的一端固定连接有固定柱,所述固定柱的下端安装有电动滑轨,所述电动滑轨上安装有安装座,所述安装座远离电动滑轨的一端活动连接有旋转座,所述机械臂连接座的左端固定连接有电机,电机的输出端固定连接有齿轮,所述转动座的外侧固定连接有齿条。
3、进一步,所述机械臂连接座远离机械臂的一端开设有转槽,所述机械臂连接座的表面开设有转孔。
4、进一步,所述转动座靠近机械臂连接座的一端固定连接有活动珠,所述活动珠的数量为两个,且活动珠位于转槽的内侧。
5、进一步,所述安装座远离电动滑轨的一端开设有旋转槽,所述安装座的下端开设有锁定槽,所述锁定槽的数量为若干个。
6、进一步,所述旋转座靠近安装座的一端固定连接有转珠,转珠位于旋转座的中间位置,所述转珠在旋转槽的内侧转动。
7、进一步,所述旋转座的内侧活动连接有锁定柱,所述锁定柱与旋转座之间固定连接有弹簧。
8、与现有技术相比,本申请的技术方案具备以下有益效果:
9、该机器人焊枪调节装置,通过设置了调节组件,通过电机的启动,电机带动齿轮进行转动,在转槽与活动珠的配合下,从而通过齿条啮合转动座进行旋转,从而使其焊枪夹座可带动焊枪进行角度调节,使其焊枪可进行三百六十度焊接;通过设置了电动滑轨,从而使其安装座可在固定柱上进行移动,使其焊枪可前后进行位置调节;拉动锁定柱,使其锁定柱与锁定槽进行分离,在转珠与旋转槽的配合下,焊枪夹座可带动焊枪进行倾斜角度调节。
技术特征:
1.一种机器人焊枪调节装置,包括机械臂(1),其特征在于:所述机械臂(1)的右端固定连接有机械臂连接座(2),所述机械臂连接座(2)上设置有焊枪夹座(3),所述焊枪夹座(3)与机械臂连接座(2)之间设置有调节组件(4);
2.根据权利要求1所述的一种机器人焊枪调节装置,其特征在于:所述机械臂连接座(2)远离机械臂(1)的一端开设有转槽(201),所述机械臂连接座(2)的表面开设有转孔(202)。
3.根据权利要求2所述的一种机器人焊枪调节装置,其特征在于:所述转动座(41)靠近机械臂连接座(2)的一端固定连接有活动珠(411),所述活动珠(411)的数量为两个,且活动珠(411)位于转槽(201)的内侧。
4.根据权利要求1所述的一种机器人焊枪调节装置,其特征在于:所述安装座(44)远离电动滑轨(43)的一端开设有旋转槽(441),所述安装座(44)的下端开设有锁定槽(442),所述锁定槽(442)的数量为若干个。
5.根据权利要求4所述的一种机器人焊枪调节装置,其特征在于:所述旋转座(45)靠近安装座(44)的一端固定连接有转珠(451),转珠(451)位于旋转座(45)的中间位置,所述转珠(451)在旋转槽(441)的内侧转动。
6.根据权利要求1所述的一种机器人焊枪调节装置,其特征在于:所述旋转座(45)的内侧活动连接有锁定柱(452),所述锁定柱(452)与旋转座(45)之间固定连接有弹簧(453)。
技术总结
本技术涉及一种机器人焊枪调节装置,包括机械臂,所述机械臂的右端固定连接有机械臂连接座,所述机械臂连接座上设置有焊枪夹座,所述焊枪夹座与机械臂连接座之间设置有调节组件。该机器人焊枪调节装置,通过设置了调节组件,通过电机的启动,电机带动齿轮进行转动,在转槽与活动珠的配合下,从而通过齿条啮合转动座进行旋转,从而使其焊枪夹座可带动焊枪进行角度调节,使其焊枪可进行三百六十度焊接;通过设置了电动滑轨,从而使其安装座可在固定柱上进行移动,使其焊枪可前后进行位置调节;拉动锁定柱,使其锁定柱与锁定槽进行分离,在转珠与旋转槽的配合下,焊枪夹座可带动焊枪进行倾斜角度调节。
技术研发人员:丁皞,吴杰,邢天鹏
受保护的技术使用者:上海芸志机械自动化有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!