一种工业机器人制造用焊接固定装置的制作方法
本技术涉及工业机器人制造,具体是指一种工业机器人制造用焊接固定装置。
背景技术:
1、随着计算机、传感器和控制技术的不断发展,工业机器人的制造技术也得到了极大的提升和改进,机器人制造用焊接固定装置技术是工业制造领域中常用的一种技术,它可以有效提高生产效率和产品质量,申请号为202221559221.9的一种工业机器人制造用焊接固定装置,包括固定板和多个定位机构,固定板的内部开设有若干个定位孔,多个定位机构分别安装在其中多个定位孔的内部,定位机构包括有插接在任意一个定位孔内部的定位插杆,定位插杆的外侧设置有高度调节组件,定位插杆的内部安装有圆杆,圆杆的上端固定连接有夹持组件,定位插杆的外侧还设置有用以对圆杆进行夹持的紧固组件,但该实用新型是采用螺杆带动夹移动起到对机器人焊接部件固定的作用,而此固定装置同传统机械夹紧方式相同具有工作效率低的缺陷,由于机械夹紧是由手动或电机为驱动带动机械结构以调整,通常无法实现快速切换夹与松的状态,从而影响工作效率和产能。
技术实现思路
1、本实用新型为解决上述各种问题,提出了一种工业机器人制造用焊接固定装置。
2、为解决上述的技术问题,本实用新型提出的技术方案为:
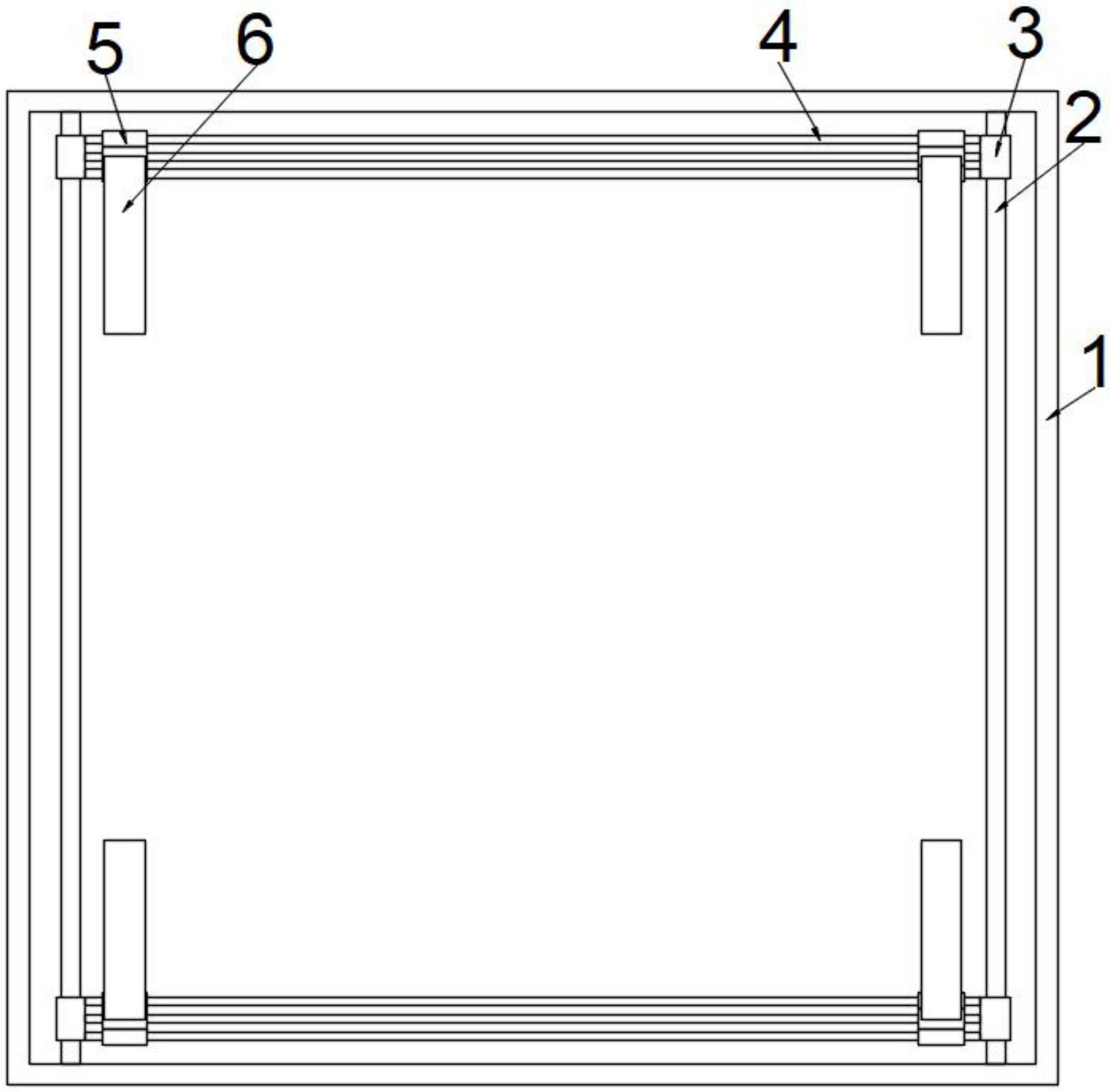
3、一种工业机器人制造用焊接固定装置,包括装置主体,所述装置主体内部左右部上下端面之间均连接有第一滑杆,两个所述第一滑杆外部均滑动套有第一滑块,上下两侧左右部两个所述第一滑块之间均固定连接有三个第二滑杆,上下两部所述第二滑杆外部均滑动套有两个第二滑块,四个所述第二滑块前端面均设有焊接固定装置,所述焊接固定装置包括机械手,所述机械手远离第二滑块一端固定连接有电磁固定夹具,所述电磁固定夹具包括固定框,所述固定框内部上下部前后端面之间均连接有第三滑杆,所述第三滑杆外部滑动套有两个夹块,两个所述夹块前后方向内侧端面均设有电磁块,内部处于固定框外部。
4、作为改进,所述第一滑块后端面固定连接有穿过装置主体内部后端面开槽的螺杆,所述螺杆穿过装置主体部分外部螺纹套有螺母,所述螺母前方设有圆环。
5、作为改进,所述第二滑块前端面上下部均螺纹插有翼型螺丝,所述翼型螺丝穿过第二滑块与第二滑杆贴合。
6、作为改进,所述机械手含有四个自由度,每个自由度的一端均由步进电机作为驱动。
7、作为改进,两个所述第三滑杆外部套有弹簧,所述弹簧位于两个夹块之间。
8、作为改进,所述固定框外侧端面设有控制器,所述控制器与电磁块之间为电信号连接。
9、本实用新型与现有技术相比优点在于:本实用新型是一种工业机器人制造用焊接固定装置,通过设置电磁固定夹具使得在对机器人部件焊接固定时,能够通过电磁固定夹具快速反应的特性使得能够快速切换对机器人部件的夹与松功能,大大提高工业机器人焊接效率和产能,设置机械手便于调整电磁固定夹具的角度、位置,大大增加了适用范围。
技术特征:
1.一种工业机器人制造用焊接固定装置,包括装置主体(1),其特征在于,所述装置主体(1)内部左右部上下端面之间均连接有第一滑杆(2),两个所述第一滑杆(2)外部均滑动套有第一滑块(3),上下两侧左右部两个所述第一滑块(3)之间均固定连接有三个第二滑杆(4),上下两部所述第二滑杆(4)外部均滑动套有两个第二滑块(5),四个所述第二滑块(5)前端面均设有焊接固定装置(6),所述焊接固定装置(6)包括机械手(7),所述机械手(7)远离第二滑块(5)一端固定连接有电磁固定夹具(8),所述电磁固定夹具(8)包括固定框(9),所述固定框(9)内部上下部前后端面之间均连接有第三滑杆(10),所述第三滑杆(10)外部滑动套有两个夹块(11),两个所述夹块(11)前后方向内侧端面均设有电磁块(12),内部处于固定框(9)外部。
2.根据权利要求1所述的一种工业机器人制造用焊接固定装置,其特征在于,所述第一滑块(3)后端面固定连接有穿过装置主体(1)内部后端面开槽的螺杆(13),所述螺杆(13)穿过装置主体(1)部分外部螺纹套有螺母(14),所述螺母(14)前方设有圆环(15)。
3.根据权利要求1所述的一种工业机器人制造用焊接固定装置,其特征在于,所述第二滑块(5)前端面上下部均螺纹插有翼型螺丝(16),所述翼型螺丝(16)穿过第二滑块(5)与第二滑杆(4)贴合。
4.根据权利要求1所述的一种工业机器人制造用焊接固定装置,其特征在于,所述机械手(7)含有四个自由度,每个自由度的一端均由步进电机作为驱动。
5.根据权利要求1所述的一种工业机器人制造用焊接固定装置,其特征在于,两个所述第三滑杆(10)外部套有弹簧(17),所述弹簧(17)位于两个夹块(11)之间。
6.根据权利要求1所述的一种工业机器人制造用焊接固定装置,其特征在于,所述固定框(9)外侧端面设有控制器(18),所述控制器(18)与电磁块(12)之间为电信号连接。
技术总结
本技术公开了一种工业机器人制造用焊接固定装置,包括装置主体,上下两侧左右部两个第一滑块之间均固定连接有三个第二滑杆,焊接固定装置包括机械手,电磁固定夹具包括固定框,固定框内部上下部前后端面之间均连接有第三滑杆,第三滑杆外部滑动套有两个夹块,两个夹块前后方向内侧端面均设有电磁块,本技术与现有技术相比优点在于:本技术是一种工业机器人制造用焊接固定装置,通过设置电磁固定夹具使得在对机器人部件焊接固定时,能够通过电磁固定夹具快速反应的特性使得能够快速切换对机器人部件的夹与松功能,大大提高工业机器人焊接效率和产能,设置机械手便于调整电磁固定夹具的角度、位置,大大增加了适用范围。
技术研发人员:虞静,黄陆君,唐海龙,黄贵余
受保护的技术使用者:四川显为智能装备有限公司
技术研发日:20230507
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!