一种无轨智能焊接机器人的制作方法
本技术涉及焊接工具,具体而言,涉及一种无轨智能焊接机器人。
背景技术:
1、现有管道自动焊接主要采用轨道导向的方式来完成行走,即,在管道上预先架设轨道,让焊接小车带着焊枪在轨道上行走,从而实现管道的焊接;此种方式不仅轨道架设较为麻烦,且还需要根据不同的管径架设不同类型的轨道。
2、因此,为了避免轨道架设,管道自动焊接商家提出了无轨焊接方式,其主要是通过磁铁吸附,即,让磁力小车吸附在管道上行走,从而实现自动化焊接;但最初的磁力小车只能简单地进行直线行走,不能转弯,故其精度很大程度上依赖于在管道上放置磁力小车时的角度是否对齐,整个操作过程较为麻烦。随着科技的发展,虽然现在市场上出现了可以转弯的磁力小车,但磁力小车仍需要人工控制其行进方向。
3、因此,现急需一种可自动识别焊缝并调节车身行进方向无轨智能焊接机器人。
技术实现思路
1、本实用新型的目的在于提供一种无轨智能焊接机器人,不仅可自动识别焊缝,且使焊接小车在行走过程中可自动调节车身的行进方向,从而实现精准焊接。
2、为实现本实用新型目的,采用的技术方案为:一种无轨智能焊接机器人,包括小车车体,小车车体上安装有磁吸轮和驱动磁吸轮的电机;所述小车车体上还安装有平摆干伸运动机构,平摆干伸运动机构输出端安装有焊枪,平摆干伸运动机构可驱动焊枪沿y、z方向运动;所述小车车体前端安装有用于检测焊缝轨迹线的激光视觉传感器。
3、进一步的,所述小车车体呈u型,焊枪位于小车车体的投影几何中心。
4、进一步的,所述磁吸轮为4个,4个磁吸轮上均安装有磁轮罩,位于小车车体同一侧的两个磁轮罩上共同安装有把手。
5、进一步的,所述小车车体上还安装有送丝机构。
6、进一步的,所述激光视觉传感器外还罩设有安装罩。
7、进一步的,所述小车车体上还安装有指示灯。
8、进一步的,所述电机为直流无刷电机。
9、本实用新型的有益效果是:
10、1、通过采用激光视觉传感器对管道上的焊缝轨迹线进行检测,并根据激光视觉传感器反馈的视觉图形调节驱动磁吸轮的电机运动状态,从而让小车车体实现自动纠偏,使焊接小车在行走过程中可自动调节车身的行进方向,实现了精准焊接。
11、2、通过采用直流无刷电机对磁吸轮进行驱动,使本实用新型的负载能力更大,转弯半径更小,小车调节更为灵敏,适应性更强。
技术特征:
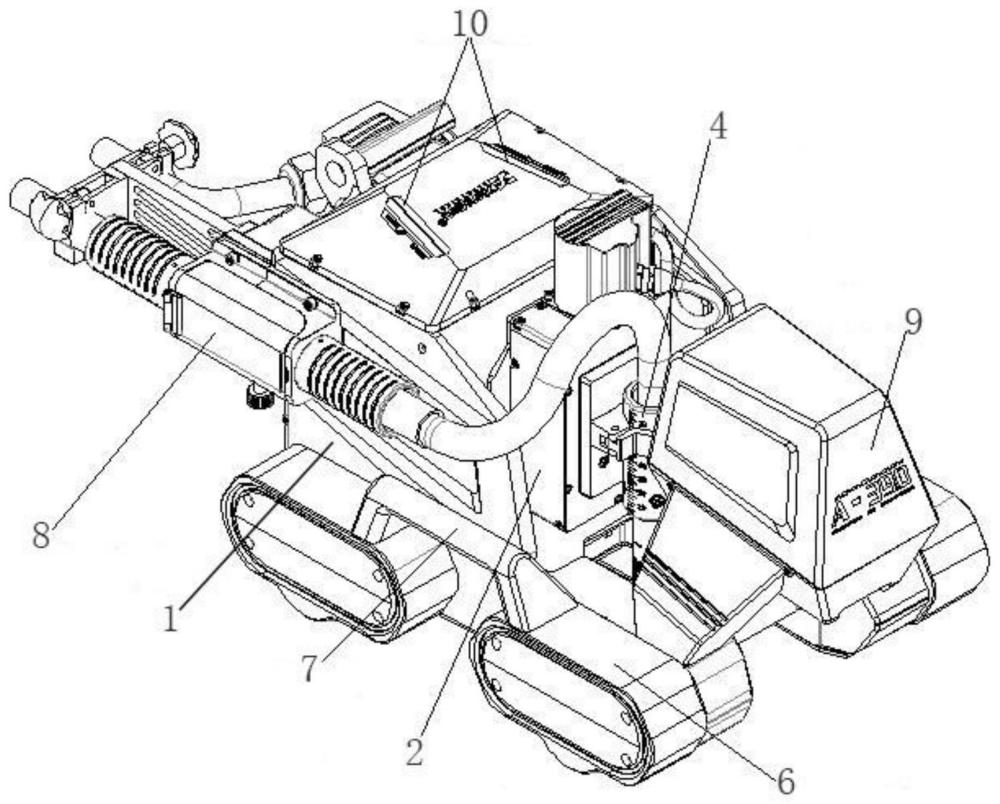
1.一种无轨智能焊接机器人,其特征在于,包括小车车体(1),小车车体(1)上安装有磁吸轮(3)和驱动磁吸轮(3)的电机;所述小车车体(1)上还安装有平摆干伸运动机构(2),平摆干伸运动机构(2)输出端安装有焊枪(4),平摆干伸运动机构(2)可驱动焊枪(4)沿y、z方向运动;所述小车车体(1)前端安装有用于检测焊缝轨迹线的激光视觉传感器(5);所述小车车体(1)呈u型,焊枪(4)位于小车车体(1)的投影几何中心。
2.根据权利要求1所述的无轨智能焊接机器人,其特征在于,所述磁吸轮(3)为4个,4个磁吸轮(3)上均安装有磁轮罩(6),位于小车车体(1)同一侧的两个磁轮罩(6)上共同安装有把手(7)。
3.根据权利要求1或2所述的无轨智能焊接机器人,其特征在于,所述小车车体(1)上还安装有送丝机构(8)。
4.根据权利要求3所述的无轨智能焊接机器人,其特征在于,所述激光视觉传感器(5)外还罩设有安装罩(9)。
5.根据权利要求3所述的无轨智能焊接机器人,其特征在于,所述小车车体(1)上还安装有指示灯(10)。
6.根据权利要求3所述的无轨智能焊接机器人,其特征在于,所述电机为直流无刷电机。
技术总结
本技术公开了一种无轨智能焊接机器人,涉及焊接工具技术领域,包括小车车体,小车车体上安装有磁吸轮和驱动磁吸轮的电机;所述小车车体上还安装有平摆干伸运动机构,平摆干伸运动机构输出端安装有焊枪,平摆干伸运动机构可驱动焊枪沿Y、Z方向运动;所述小车车体前端安装有用于检测焊缝轨迹线的激光视觉传感器。本技术通过采用激光视觉传感器对管道上的焊缝轨迹线进行检测,并根据激光视觉传感器反馈的视觉图形调节驱动磁吸轮的电机运动状态,从而让小车车体实现自动纠偏,使焊接小车在行走过程中可自动调节车身的行进方向,实现了精准焊接。
技术研发人员:杜成峰,李恒敏,熊刚
受保护的技术使用者:成都熊谷加世电器有限公司
技术研发日:20230523
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!