坡口切割工作站的制作方法
本申请涉及工业机器人,具体涉及一种坡口切割工作站。
背景技术:
1、坡口切割工作站是一种专门用于坡口切割的设备,可以对工件进行各种坡口切割。其中,自动切坡口作业多采用搬运机器人完成上料,并结合3d视觉系统、3d视觉系统形成的二次定位平台进行扫描精定位,以最终生成切割轨迹,再由搬运机器人将工件搬运至切割台,进行切割。但是,这种方式中,对工件的扫描定位是在到达切割台之前,且只能是逐一进行,各工序节奏慢,造成整体切割效率低。
技术实现思路
1、有鉴于此,本申请提供了一种坡口切割工作站,以解决现有技术中工件坡口切割作业切割效率低的问题。
2、为了达到上述目的,本申请提供如下技术方案:
3、一种坡口切割工作站,包括:
4、切割台,设有能够放置工件的多个切割工位;
5、切割机器人,能够对各个所述切割工位上的工件分别进行切割;
6、第一3d视觉系统,与所述切割机器人通信连接,设有多个且分别位于对应的所述切割工位上方,以对工件进行扫描并向所述切割机器人提供切割轨迹;
7、搬运机器人,能够转移工件,以对各个所述切割工位分别上料和下料。
8、可选的,所述切割台具有朝上的敞口,且所述敞口中设有安全网。
9、可选的,所述切割工位处设有用于架空工件的工件支架。
10、可选的,还包括除尘系统,所述除尘系统包括:
11、除尘通道,连接在所述切割台中,位于所述工件支架下方且与所述工件支架所在空间连通;
12、除尘机,能够向所述除尘通道提供负压,以将掉落的碎屑排走。
13、可选的,还包括设置在所述搬运机器人上且用于识别并定位工件的第二3d视觉系统,所述搬运机器人与所述第二3d视觉系统通信连接,以使所述搬运机器人的抓手精准抓取工件。
14、可选的,所述切割工位设有沿直线方向排列的2n个,其中n个所述切割工位与其余n个所述切割工位关于对称线对称分布,所述搬运机器人与所述切割机器人均位于所述对称线上且关于所述切割台相对;其中,n为大于等于1的正整数。
15、可选的,所述搬运机器人两侧的空间中设有关于所述对称线对称的运输区,所述运输区均包括上料区和下料区,所述搬运机器人能够夹持工件在所述上料区、所述切割工位以及所述下料区之间移动。
16、可选的,所述上料区与所述下料区上设有供工件放置的托盘,agv能够运输所述托盘。
17、可选的,所述第一3d视觉系统安装在相机支架上。
18、可选的,所述相机支架包括:
19、立杆,与所述切割台或地面连接;
20、横杆,与所述立杆滑动连接且位置能够固定;
21、其中,所述第一3d视觉系统与所述横杆滑动连接且位置能够固定。
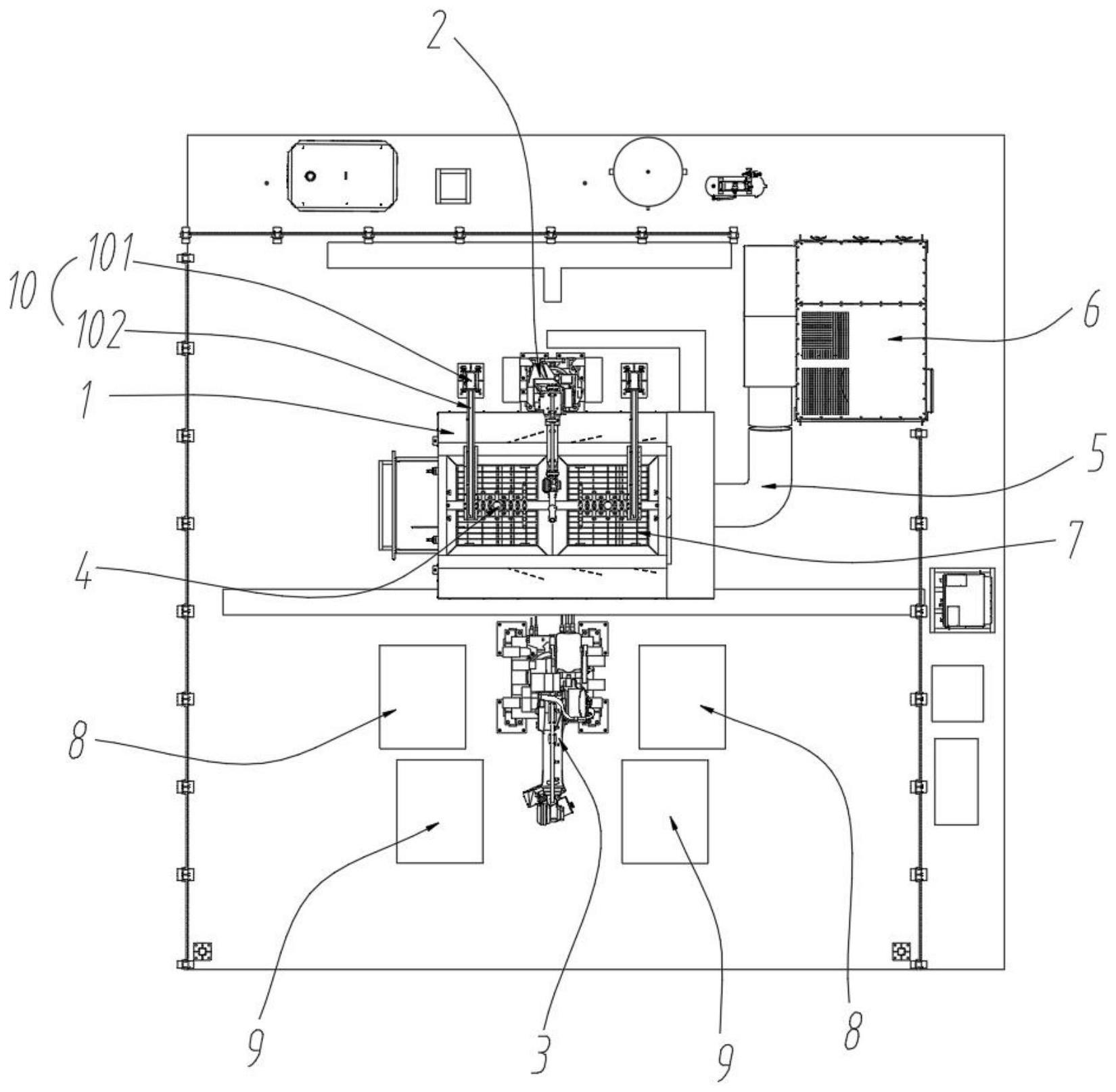
22、本申请提供的坡口切割工作站,包括有序集成的切割台、切割机器人、第一3d视觉系统以及搬运机器人,切割台上设有多个切割工位,搬运机器人进行上料以将工件放置在切割工位,各个切割工位上方均有对应的用于扫描工件的第一3d视觉系统,以完成对工件的定位、将生成的切割轨迹提供给切割机器人,实现各个切割工位上均能分别进行切割作业,最后由搬运机器人进行下料以将工件取走,其中,当某一个切割工位进行切割作业时,其他的切割工位上可进行对工件的扫描或工件的上下料,即其中一个切割工位的切割作业完成后,切割机器人可直接在另一个切割工位进行切割作业,多工位交替工作,节奏快,整体切割效率高,解决了现有技术中工件坡口切割作业切割效率低的问题。
技术特征:
1.一种坡口切割工作站,其特征在于,包括:
2.根据权利要求1所述的坡口切割工作站,其特征在于,所述切割台(1)具有朝上的敞口,且所述敞口中设有安全网(7)。
3.根据权利要求1所述的坡口切割工作站,其特征在于,所述切割工位处设有用于架空工件的工件支架(4)。
4.根据权利要求3所述的坡口切割工作站,其特征在于,还包括除尘系统,所述除尘系统包括:
5.根据权利要求1所述的坡口切割工作站,其特征在于,所述切割工位设有沿直线方向排列的2n个,其中n个所述切割工位与其余n个所述切割工位关于对称线对称分布,所述搬运机器人(3)与所述切割机器人(2)均位于所述对称线上;其中,n为大于等于1的正整数。
6.根据权利要求5所述的坡口切割工作站,其特征在于,所述运输区关于所述对称线对称。
7.根据权利要求1所述的坡口切割工作站,其特征在于,所述上料区(8)与所述下料区(9)上设有供工件放置的托盘,agv能够运输所述托盘。
8.根据权利要求1所述的坡口切割工作站,其特征在于,所述第一3d视觉系统安装在相机支架(10)上。
9.根据权利要求8所述的坡口切割工作站,其特征在于,所述相机支架(10)包括:
技术总结
本申请提供了一种坡口切割工作站,包括切割台、切割机器人、第一3D视觉系统以及搬运机器人;其中,切割台设有能够放置工件的多个切割工位;切割机器人能够对各个切割工位上的工件分别进行切割;第一3D视觉系统与切割机器人通信连接,设有多个且分别位于对应的切割工位上方,以对工件进行扫描并向切割机器人提供切割轨迹;搬运机器人能够转移工件,以对各个切割工位分别上料和下料。如此设置,其中一个切割工位的切割作业完成后,切割机器人可直接在另一个切割工位进行切割作业,多工位交替工作,节奏快,整体切割效率高,解决了现有技术中工件坡口切割作业切割效率低的问题。
技术研发人员:李玉玉,葛文彬
受保护的技术使用者:三一机器人科技有限公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!