一种动平衡换型尾座定位机构的制作方法
本技术涉及工件定位,特别涉及一种动平衡换型尾座定位机构。
背景技术:
1、风机、风扇或风轮等的零部件进行加工时,一般通过抱夹装置对工件进行夹紧,然后进行加工,例如中国专利文献号cn217397710u于2022年9月9日公开的一种风机主轴自动抱夹翻转装置,通过两个翻转机构的前滚轮架抱夹住风机主轴的前部,两个翻转机构的后滚轮架抱夹住风机主轴的后部,实现风机主轴的夹紧;但在上一个工位的工件(风机主轴)到这一工位(抱夹翻转装置)前,这一工位会先完成定位,一般通过人工手动定位及固定,但人工手动定位人工成本高,且定位不精确。
2、因此,有必要做进一步改进。
技术实现思路
1、本实用新型的目的旨在提供一种结构简单、定位精确、成本低、生产效率高、实用性强的动平衡换型尾座定位机构,以克服现有技术中的不足之处。
2、按此目的设计的一种动平衡换型尾座定位机构,其特征在于:包括第一底板、锁紧装置、定位移动装置、推动装置、顶料装置、抱夹装置和推料装置,定位移动装置设置在第一底板上,且定位移动装置传动连接推动装置,锁紧装置设置在第一底板的两侧,推动装置活动设置在第一底板上,推动装置和推料装置驱动连接抱夹装置,抱夹装置活动设置在推动装置上,顶料装置固定设置在推动装置上;定位机构工作时,定位移动装置驱动推动装置移动至目标位置,锁紧装置将推动装置锁紧在第一底板上,推动装置驱动抱夹装置移动至目标位置,顶料装置上顶工件,推料装置驱动抱夹装置移动至目标位置,抱夹装置将工件夹紧固定。
3、定位移动装置包括第一驱动器、传动组件和调节座,推动装置包括第二底板,第一驱动器驱动连接传动组件,传动组件与调节座传动连接,第一驱动器安装在调节座上,调节座与第二底板配合连接,第二底板活动设置在第一底板上。
4、传动组件包括第一齿轮、第二齿轮和齿条,第一驱动器驱动连接第一齿轮,第二齿轮分别与第一齿轮、齿条相互啮合,齿条固定在第一底板上,第二齿轮与调节座转动连接;第一驱动器为步进电机。
5、锁紧装置包括安装座组件、第二驱动器、锁紧手柄和锁紧座,安装座组件固定在锁紧座上,第二驱动器固定在安装座组件上,第二驱动器驱动连接锁紧手柄,锁紧手柄一端与锁紧座转动连接,锁紧座与第二底板配合连接;第二驱动器驱动锁紧手柄向上移动,以使锁紧手柄一端在锁紧座上转动,锁紧手柄一端转动时卡住第一底板,以将第二底板锁紧在第一底板上。
6、锁紧手柄一端设置有偏心轮,锁紧座上设置有转动轴,偏心轮与转动轴配合连接。
7、推动装置还包括第三驱动器和第三底板,第三驱动器固定在第二底板上,第三驱动器驱动连接第三底板,第三底板活动设置在第二底板上。
8、顶料装置包括固定座、第四驱动器和顶料座,固定座固定在第二底板上,第四驱动器固定在固定座上,第四驱动器驱动连接顶料座。
9、抱夹装置包括抱夹座、第五驱动器、设置在第五驱动器两侧的抱夹块,抱夹座固定在第三底板上,第五驱动器固定在抱夹座上,第五驱动器分别驱动连接两抱夹块,第五驱动器驱动两抱夹块作开合运动。
10、推料装置包括第六驱动器和连接板,第六驱动器驱动连接连接板,连接板与抱夹座配合连接。
11、抱夹装置还包括侧座板和防撞块,侧座板固定在第三底板上,且位于两抱夹块之间,防撞块设置在侧座板上。
12、本实用新型的定位机构在上一个工位的工件到这一工位(定位机构)前,定位机构对这一工位会先完成定位,具体通过步进电机带动推动装置运动,推动装置到达目标位置时,电机停止,此时上一个工位的工件就可以精确放到顶料装置上,然后推动装置将抱夹装置推到目标位置,顶料装置将工件顶起,推料装置将抱夹装置推到目标位置,抱夹装置抱紧固定住工件,然后就可以对工件进行加工,通过步进电机实现精确定位,替换了人工手动定位及固定,无需人工手动调节位置,节约了人力成本,定位更加精准,提高了换型效率和定位效率,节约了时间成本;此外,这一工位进行定位后,通过锁紧装置将推动装置(第二底板)锁紧在第一底板上,防止顶料装置、抱夹装置、推料装置工作时和工件加工时推动装置(第二底板)发生松动而导致定位失效。
技术特征:
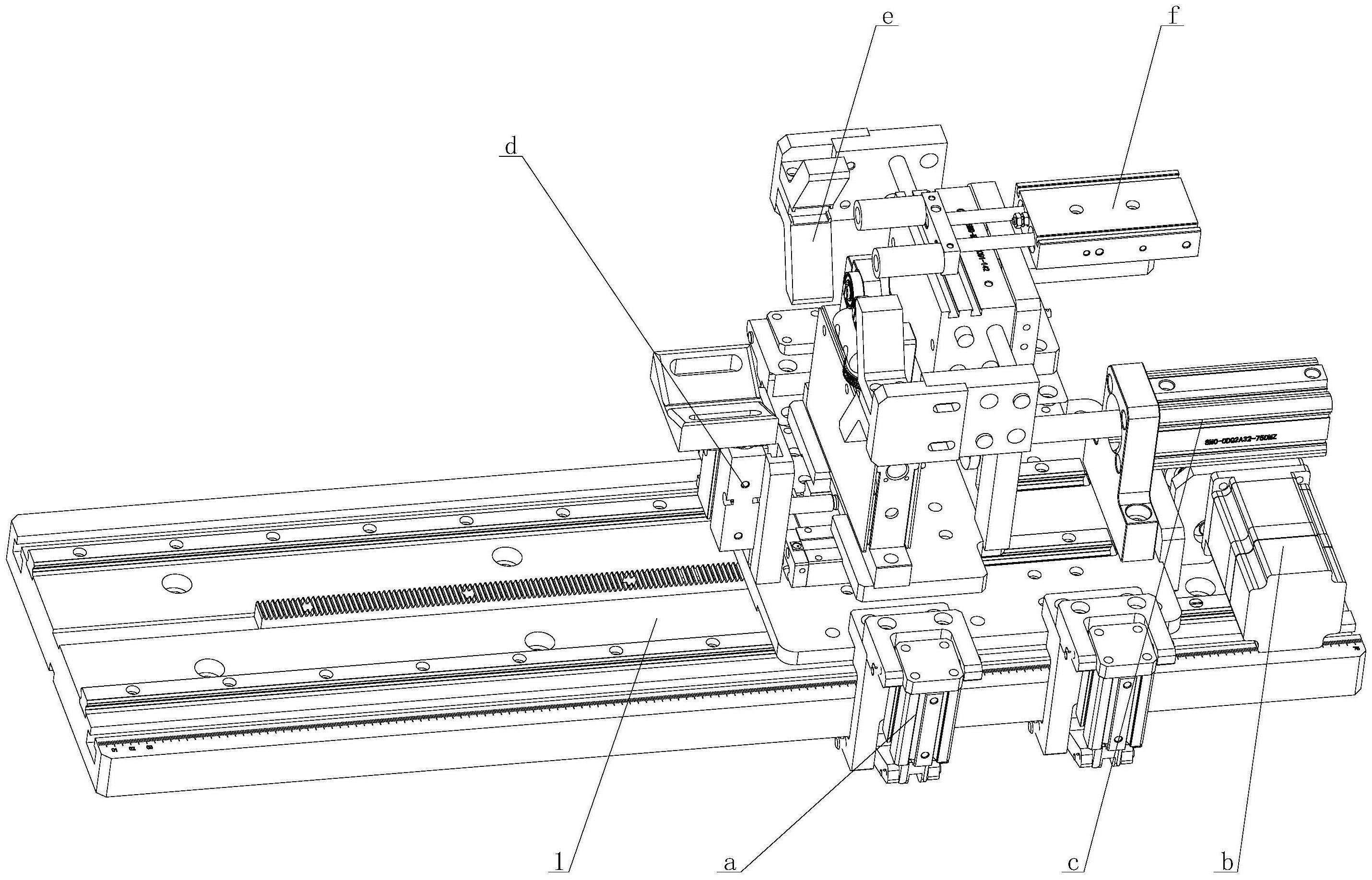
1.一种动平衡换型尾座定位机构,其特征在于:包括第一底板(1)、锁紧装置(a)、定位移动装置(b)、推动装置(c)、顶料装置(d)、抱夹装置(e)和推料装置(f),定位移动装置(b)设置在第一底板(1)上,且定位移动装置(b)传动连接推动装置(c),锁紧装置(a)设置在第一底板(1)的两侧,推动装置(c)活动设置在第一底板(1)上,推动装置(c)和推料装置(f)驱动连接抱夹装置(e),抱夹装置(e)活动设置在推动装置(c)上,顶料装置(d)固定设置在推动装置(c)上;定位机构工作时,定位移动装置(b)驱动推动装置(c)移动至目标位置,锁紧装置(a)将推动装置(c)锁紧在第一底板(1)上,推动装置(c)驱动抱夹装置(e)移动至目标位置,顶料装置(d)上顶工件,推料装置(f)驱动抱夹装置(e)移动至目标位置,抱夹装置(e)将工件夹紧固定。
2.根据权利要求1所述的动平衡换型尾座定位机构,其特征在于:定位移动装置(b)包括第一驱动器(2)、传动组件和调节座(6),推动装置(c)包括第二底板(7),第一驱动器(2)驱动连接传动组件,传动组件与调节座(6)传动连接,第一驱动器(2)安装在调节座(6)上,调节座(6)与第二底板(7)配合连接,第二底板(7)活动设置在第一底板(1)上。
3.根据权利要求2所述的动平衡换型尾座定位机构,其特征在于:传动组件包括第一齿轮(3)、第二齿轮(4)和齿条(5),第一驱动器(2)驱动连接第一齿轮(3),第二齿轮(4)分别与第一齿轮(3)、齿条(5)相互啮合,齿条(5)固定在第一底板(1)上,第二齿轮(4)与调节座(6)转动连接;第一驱动器(2)为步进电机。
4.根据权利要求2所述的动平衡换型尾座定位机构,其特征在于:锁紧装置(a)包括安装座组件(8)、第二驱动器(9)、锁紧手柄(10)和锁紧座(11),安装座组件(8)固定在锁紧座(11)上,第二驱动器(9)固定在安装座组件(8)上,第二驱动器(9)驱动连接锁紧手柄(10),锁紧手柄(10)一端与锁紧座(11)转动连接,锁紧座(11)与第二底板(7)配合连接;第二驱动器(9)驱动锁紧手柄(10)向上移动,以使锁紧手柄(10)一端在锁紧座(11)上转动,锁紧手柄(10)一端转动时卡住第一底板(1),以将第二底板(7)锁紧在第一底板(1)上。
5.根据权利要求4所述的动平衡换型尾座定位机构,其特征在于:锁紧手柄(10)一端设置有偏心轮(12),锁紧座(11)上设置有转动轴(13),偏心轮(12)与转动轴(13)配合连接。
6.根据权利要求2所述的动平衡换型尾座定位机构,其特征在于:推动装置(c)还包括第三驱动器(14)和第三底板(15),第三驱动器(14)固定在第二底板(7)上,第三驱动器(14)驱动连接第三底板(15),第三底板(15)活动设置在第二底板(7)上。
7.根据权利要求2所述的动平衡换型尾座定位机构,其特征在于:顶料装置(d)包括固定座(16)、第四驱动器(17)和顶料座(18),固定座(16)固定在第二底板(7)上,第四驱动器(17)固定在固定座(16)上,第四驱动器(17)驱动连接顶料座(18)。
8.根据权利要求6所述的动平衡换型尾座定位机构,其特征在于:抱夹装置(e)包括抱夹座(19)、第五驱动器(20)、设置在第五驱动器(20)两侧的抱夹块(21),抱夹座(19)固定在第三底板(15)上,第五驱动器(20)固定在抱夹座(19)上,第五驱动器(20)分别驱动连接两抱夹块(21),第五驱动器(20)驱动两抱夹块(21)作开合运动。
9.根据权利要求8所述的动平衡换型尾座定位机构,其特征在于:推料装置(f)包括第六驱动器(22)和连接板(23),第六驱动器(22)驱动连接连接板(23),连接板(23)与抱夹座(19)配合连接。
10.根据权利要求8所述的动平衡换型尾座定位机构,其特征在于:抱夹装置(e)还包括侧座板(24)和防撞块(25),侧座板(24)固定在第三底板(15)上,且位于两抱夹块(21)之间,防撞块(25)设置在侧座板(24)上。
技术总结
一种动平衡换型尾座定位机构,包括第一底板、锁紧装置、定位移动装置、推动装置、顶料装置、抱夹装置和推料装置,定位移动装置设置在第一底板上,且定位移动装置传动连接推动装置,锁紧装置设置在第一底板的两侧,推动装置活动设置在第一底板上,推动装置和推料装置驱动连接抱夹装置,抱夹装置活动设置在推动装置上,顶料装置固定设置在推动装置上。本技术的定位机构在上一个工位的工件到这一工位(定位机构)前,定位机构对这一工位会先完成定位,具体通过步进电机带动推动装置运动,推动装置到达目标位置时,电机停止,通过步进电机实现精确定位,替换了人工手动定位及固定,节约了人力成本,且定位更加精准。
技术研发人员:何兵,何锦章
受保护的技术使用者:广东顺威自动化装备有限公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!