一种用于箱体顶部的自动锁附装置的制作方法
本技术涉及自动锁附,特别涉及一种用于箱体顶部的自动锁附装置。
背景技术:
1、箱体顶部一般会通过螺丝来固定各种部件,例如机箱顶部设有端子,端子通过螺栓固定在机箱上,机箱通过端子与外界电路连接。或者箱体顶部的盖板也需要通过螺钉与箱子本体固定在一起,这些通过螺丝固定的工序为锁附工序。传统锁附工序为人工锁附,手动用拧紧枪固定螺丝,但是人工锁附的工作效率低下,且锁附过程中会出现漏锁问题,导致产品的次品率升高。
2、目前,市面上出现了利用机器人进行锁附操作的自动锁附装置,工作效率大大提高。箱体在传送带上传送到锁附工位时,需要利用固定装置对箱体进行定位,由于箱体在传送带上的位置会出现偏差,定位的效果不是很好,锁附时,螺丝容易偏位。另外,箱体一般放置在载板上随传送带移动,由于不同载板在使用过程中产生的磨损不同,使得每个载板的厚度会发生变化,在自动锁附时,无法保证所有箱体上的螺孔高度保持一致,从而出现螺丝偏位、螺丝未锁紧等问题,导致次品率的增加。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种用于箱体顶部的自动锁附装置,实现锁附自动化操作,大大提高锁附效率,降低产品不良率。
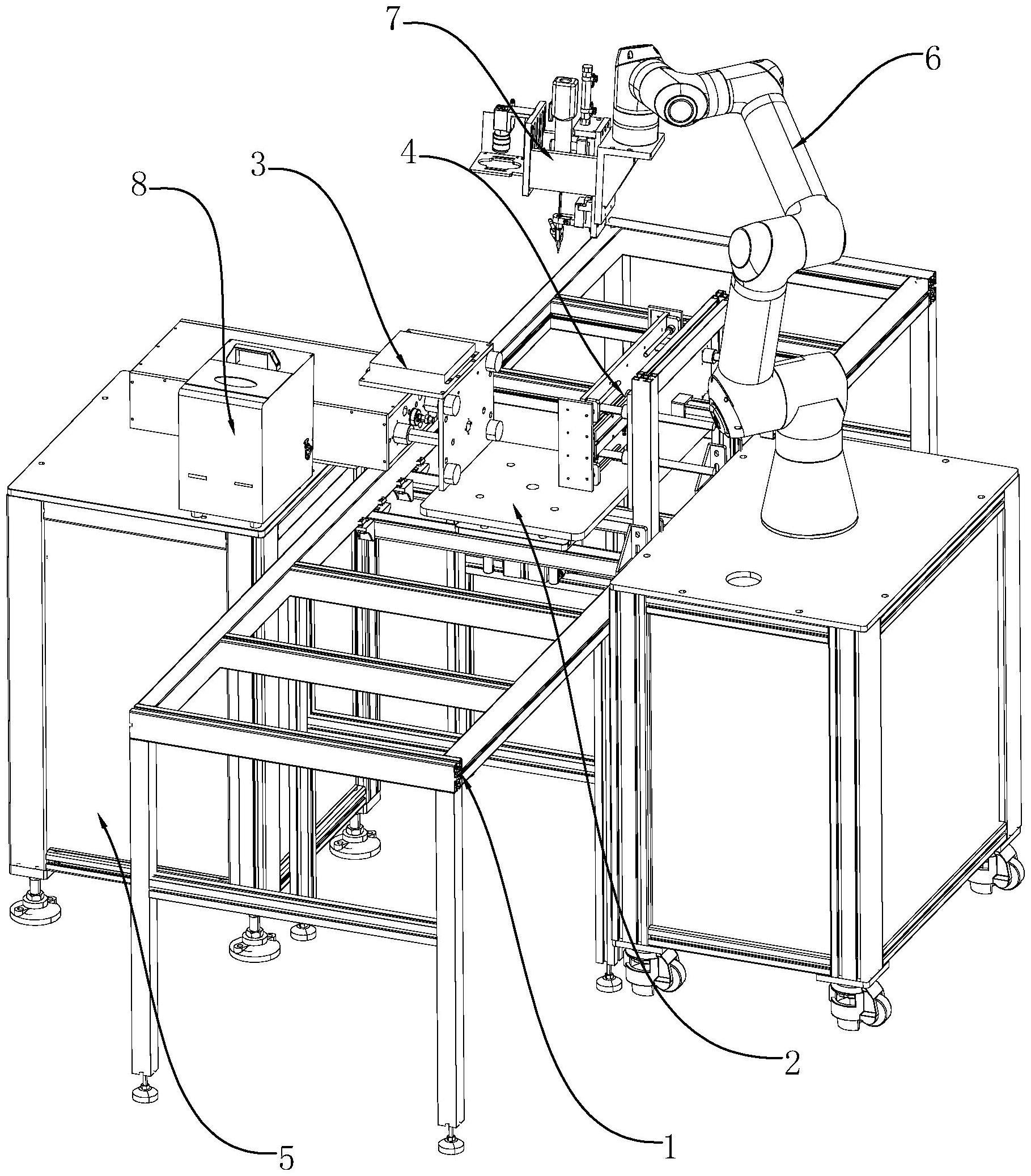
2、为此,本实用新型的技术方案是:一种用于箱体顶部的自动锁附装置,包括输送线,输送线上设有锁附工位,锁附工位侧面设有机器人,机器人末端安装有锁附组件,锁附组件包括拧紧系统、视觉检测系统和距离检测系统;所述锁附工位上设有定位夹持机构,定位夹持机构包括设置在输送线两侧的第一定位组件和第二定位组件,两者相向设置。
3、在上述方案的基础上并作为上述方案的优选方案:所述第一定位组件上设有一可移动的第一推动块,第一推动块上设有固定件和照明光源。
4、在上述方案的基础上并作为上述方案的优选方案:所述固定件为电磁吸附件。在第一推动块的推动过程中,固定件可以很好地吸附住箱体,使其在推动的过程中不会发生倾倒和左右移动。
5、在上述方案的基础上并作为上述方案的优选方案:所述固定件为真空吸附件。真空吸附件可选用真空吸盘,利用负压固定住箱体,使其在推动的过程中不会发生倾倒和左右移动。
6、在上述方案的基础上并作为上述方案的优选方案:所述拧紧系统包括拧紧枪和螺丝供料系统。拧紧枪为电动拧紧枪、气动拧紧枪、智能拧紧枪、伺服拧紧枪等;螺丝供料系统包括螺丝排列机、螺丝传统震动盘、螺丝柔性震动盘等,供料方式有吹钉式与吸钉式两种。
7、在上述方案的基础上并作为上述方案的优选方案:所述视觉检测系统包括但不限于ccd相机检测系统、cmos相机检测系统、tof相机检测系统。
8、在上述方案的基础上并作为上述方案的优选方案:所述距离检测系统包括但不限于激光检测传感器、超声波检测传感器、红外线检测传感器、毫米波雷达检测传感器。
9、在上述方案的基础上并作为上述方案的优选方案:所述锁附工位上还设有阻停机构,阻停机构包括可升降的阻停件。
10、在上述方案的基础上并作为上述方案的优选方案:所述第一定位组件上还包括驱使第一推动块朝向输送线移动的第一执行机构。
11、在上述方案的基础上并作为上述方案的优选方案:所述第二定位组件上设有可朝向输送线移动的第二推动块,且第二推动块上设有夹持组件。
12、在上述方案的基础上并作为上述方案的优选方案:所述第二定位组件上还包括驱使第二推动块朝向输送线移动的第二执行机构。
13、在上述方案的基础上并作为上述方案的优选方案:所述夹持组件包括两个可相向或相背移动的夹持板,两夹持板之间形成夹持位。
14、在上述方案的基础上并作为上述方案的优选方案:所述夹持组件还包括驱使两夹持板相向或相背移动的第三执行机构。
15、在上述方案的基础上并作为上述方案的优选方案:所述夹持组件包括一限位板,以及可相对限位板来回移动的夹持板,夹持板与限位板之间形成夹持位。
16、在上述方案的基础上并作为上述方案的优选方案:所述夹持板内侧设有防护垫,防护垫包括但不限于塑料材质和布料材质。塑料材质包括优力胶、硅胶、橡胶等,布料可选用带绒毛布料,可以防止夹紧机构会对箱体造成划伤。
17、视觉检测系统用于检测箱体顶部的螺纹孔位置,引导机器人移动到准确的位置拧紧;距离检测系统能检测每个箱体顶部离机器人末端工装的位置,从而对每个箱体锁附高度位置进行相应的补偿,使其锁附时不受其影响。
18、与现有技术相比,本实用新型的有益效果是:
19、1、采用全自动锁附工艺,生产效率高,出错率低,可有效避免人为状态因素引起的产能不稳定;整套设备一次性投入,不会产生后续额外费用,设备维护成本低,可靠性高,与人工成本日惭上涨的趋势相比,具有良好的经济效益。
20、2、箱体定位时,利用阻停机构使箱体停留在锁附工位上,利用定位夹持机构分别对箱体前后与左右进行限位固定,牢牢固定箱体,防止箱体在锁附工序中移位,保证锁附的精准性。
21、3、在机器人末端使用了距离检测系统,可有效解决了因箱体载板高度不同而引起锁附失败的问题。
22、4、第一定位组件上设置有固定件,在推动过程中,利用固定件可以很好地吸附住箱体,使其在推动的过程中不会发生倾倒和左右移动。
23、5、照明光源设置在第一推动块上,并随第一推动块伸入到箱体内部,从内部向上打光,使光透过螺纹孔而出,方便机器人末端的视觉检测系统捕捉,大大提高了锁附的成功率。
技术特征:
1.一种用于箱体顶部的自动锁附装置,包括输送线,输送线上设有锁附工位,锁附工位侧面设有机器人,机器人末端安装有锁附组件,其特征在于:锁附组件包括拧紧系统、视觉检测系统和距离检测系统;所述锁附工位上设有定位夹持机构,定位夹持机构包括设置在输送线两侧的第一定位组件和第二定位组件,两者相向设置。
2.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述第一定位组件上设有一可移动的第一推动块,第一推动块上设有固定件和照明光源。
3.如权利要求2所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述固定件为电磁吸附件。
4.如权利要求2所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述固定件为真空吸附件。
5.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述拧紧系统包括拧紧枪和螺丝供料系统。
6.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述视觉检测系统包括但不限于ccd相机检测系统、cmos相机检测系统、tof相机检测系统。
7.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述距离检测系统包括但不限于激光检测传感器、超声波检测传感器、红外线检测传感器、毫米波雷达检测传感器。
8.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述锁附工位上还设有阻停机构,阻停机构包括可升降的阻停件。
9.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述第一定位组件上还包括驱使第一推动块朝向输送线移动的第一执行机构。
10.如权利要求1所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述第二定位组件上设有可朝向输送线移动的第二推动块,且第二推动块上设有夹持组件。
11.如权利要求10所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述第二定位组件上还包括驱使第二推动块朝向输送线移动的第二执行机构。
12.如权利要求10所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述夹持组件包括两个可相向或相背移动的夹持板,两夹持板之间形成夹持位。
13.如权利要求12所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述夹持组件还包括驱使两夹持板相向或相背移动的第三执行机构。
14.如权利要求10所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述夹持组件包括一限位板,以及可相对限位板来回移动的夹持板,夹持板与限位板之间形成夹持位。
15.如权利要求12或14所述的一种用于箱体顶部的自动锁附装置,其特征在于:所述夹持板内侧设有防护垫,防护垫包括但不限于塑料材质和布料材质。
技术总结
本技术公开了一种用于箱体顶部的自动锁附装置,包括输送线,输送线上设有锁附工位,锁附工位侧面设有机器人,机器人末端安装有锁附组件,锁附组件包括拧紧系统、视觉检测系统和距离检测系统;所述锁附工位上设有定位夹持机构,定位夹持机构包括设置在输送线两侧的第一定位组件和第二定位组件,两者相向设置。本技术采用全自动锁附工艺,生产效率高,出错率低,可有效避免人为状态因素引起的产能不稳定;利用定位夹持机构分别对箱体前后与左右进行限位固定,牢牢固定箱体,防止箱体在锁附工序中移位,保证锁附的精准性。
技术研发人员:虞军
受保护的技术使用者:溱者(嘉兴)机器人科技有限公司
技术研发日:20230524
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!