一种用于车辆制造的机器人焊接装置的制作方法
本技术涉及车辆,特别涉及一种用于车辆制造的机器人焊接装置。
背景技术:
1、目前,在重型车辆中存在很多小型的支架类结构件,这些支架类结构件均是通过板材和管材焊接而成的,且往往需要承受较大的载荷且受力情况复杂,因此对焊接质量的要求较高。为了提高焊接质量,目前很多车辆制造企业均引入了多关节焊接机器人,多关节焊接机器人是一种通用设备,具有极好的灵活性,可完成各种复杂的焊接工作,而上述的小型的支架类结构件,结构往往比较简单,使用多关节焊接机器人进行焊接,装备结构复杂、加工以及后续维修成本高。
2、多关节焊接机器人是一种高度精密的先进制造设备,其关节处采用的谐波减速机等部件科技含量极高,有些国内甚至无法生产,因此,多关节焊接机器人关节处的机构运动损耗是使用成本的重要组成部分,如果能在焊接时减少多关节焊接机器人关节处的机构运动损耗,那么其使用成本将大幅降低,从而使采用多关节焊接机器人焊接上述的小型支架类结构件的成本大幅降低。
技术实现思路
1、本实用新型提供了一种用于车辆制造的机器人焊接装置,目的是,在采用多关节焊接机器人焊接小型支架类零件时,减少多关节焊接机器人关节处的机构运动,从而降低焊接机器人的使用成本,采用的技术方案如下:
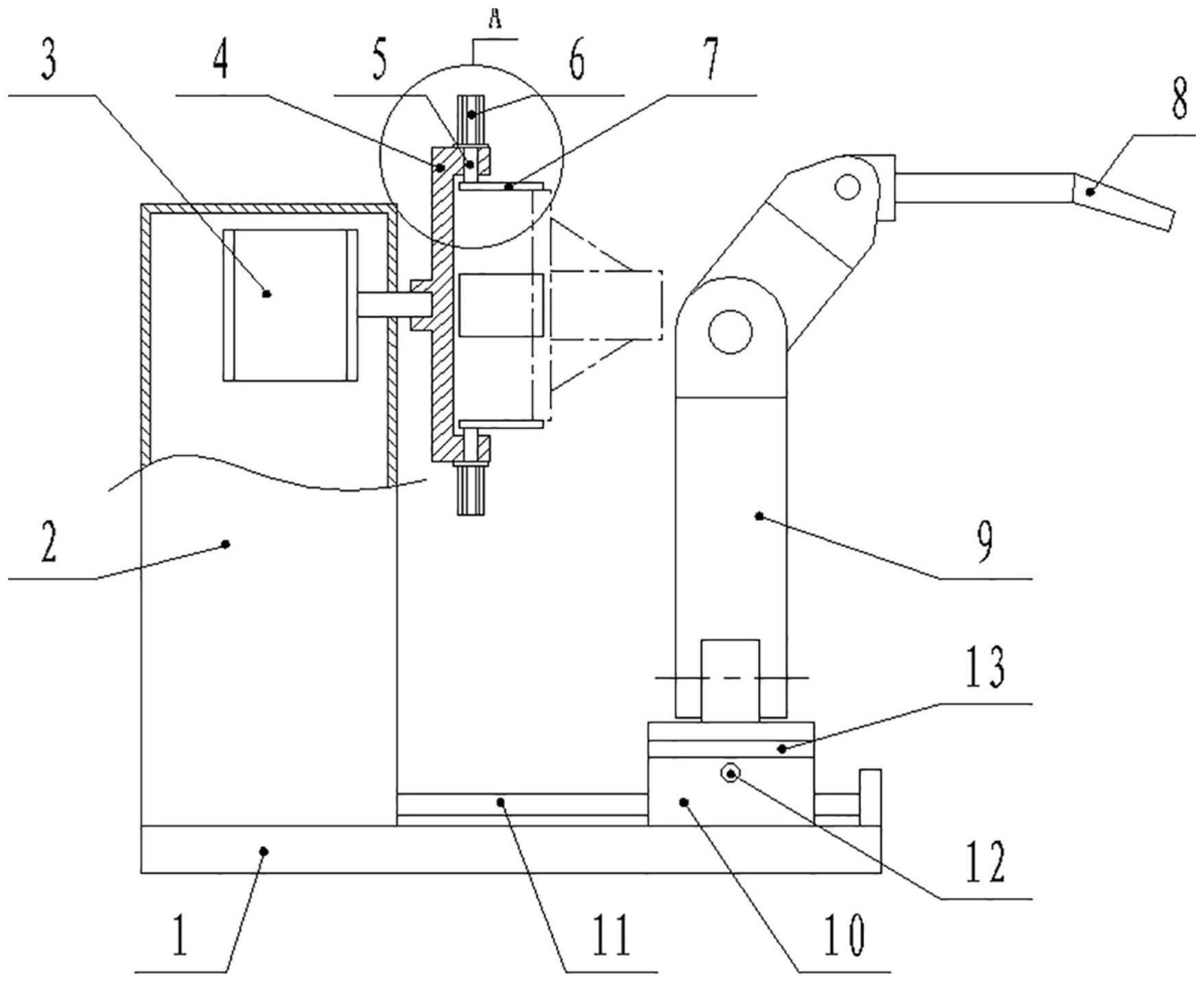
2、一种用于车辆制造的机器人焊接装置,其特征在于,包括:
3、底座;
4、主轴箱,所述主轴箱固定连接于底座上方,主轴箱内设置有主轴电机,所述主轴电机输出轴一端伸出至主轴箱外部;
5、卡盘,所述卡盘固定连接于主轴电机输出轴伸出主轴箱外部的一端,且卡盘上设置有用于装夹工件的夹紧机构;
6、十字拖板,包括横向滑座、横向丝杠、纵向滑座和纵向丝杠,所述横向滑座通过横向丝杠滑动连接于在底座上方,所述纵向滑座滑动通过纵向丝杠滑动连接于横向滑座上方,横向丝杠和纵向丝杠的端部均设置有用于驱动相应丝杠旋转的驱动电机。
7、进一步地,所述卡盘的圆周上均匀设置有至少三组夹紧机构,所述夹紧机构包括气缸和夹爪,所述气缸活塞杆一端固定连接有滑杆,所述滑杆长度沿垂直于主轴箱输出轴轴线方向分布且一端位于卡盘内部,位于卡盘内部的滑杆一端与夹爪固定连接。
8、进一步地,所述夹爪的边缘伸出至卡盘的外部。
9、进一步地,所述夹爪的内侧固定设置有用于固定工件的电磁吸盘。
10、进一步地,所述卡盘的轴线沿水平方向分布。
11、进一步地,所述卡盘的轴线沿竖直方向分布。
12、进一步地,所述卡盘的转动范围为±180度。
13、本实用新型的有益效果在于:
14、1、通过设置可旋转的卡盘使工件能够回转,通过设置十字拖板使焊接机器人能够横向和纵向移动,在焊接小型支架类结构件时,可大幅减少焊接机器人的关节运动,从而大幅降低焊接机器人在焊接小型支架类结构件时的使用成本;
15、2、通过十字拖板带动焊接机器人在底座上横向和纵向滑动,使工件和焊接机器人的相对位置变化更多样,极大地拓展了焊接机器人的适用场景。
技术特征:
1.一种用于车辆制造的机器人焊接装置,其特征在于,包括:
2.根据权利要求1所述的用于车辆制造的机器人焊接装置,其特征在于,所述卡盘(4)的圆周上均匀设置有至少三组夹紧机构,所述夹紧机构包括气缸(6)和夹爪(7),所述气缸(6)活塞杆一端固定连接有滑杆(5),所述滑杆(5)长度沿垂直于主轴箱(2)输出轴轴线方向分布且一端位于卡盘内部,位于卡盘(4)内部的滑杆(5)一端与夹爪(7)固定连接。
3.根据权利要求2所述的用于车辆制造的机器人焊接装置,其特征在于,所述夹爪(7)的边缘伸出至卡盘(4)的外部。
4.根据权利要求2所述的用于车辆制造的机器人焊接装置,其特征在于,所述夹爪(7)的内侧固定设置有用于固定工件(14)的电磁吸盘(15)。
5.根据权利要求1或2所述的用于车辆制造的机器人焊接装置,其特征在于,所述卡盘(4)的轴线沿水平方向分布。
6.根据权利要求1或2所述的用于车辆制造的机器人焊接装置,其特征在于,所述卡盘(4)的轴线沿竖直方向分布。
7.根据权利要求1或2所述的用于车辆制造的机器人焊接装置,其特征在于,所述卡盘(4)的转动范围为±180度。
技术总结
为了在降低多关节焊接机器人焊接小型支架类零件时的使用成本,本技术提供了一种用于车辆制造的机器人焊接装置,包括:底座、固定连接于底座上方的主轴箱、卡盘以及十字拖板,主轴箱内设置有主轴电机,卡盘固定连接于主轴电机输出轴伸出主轴箱外部的一端,卡盘上设置有用夹紧机构;十字拖板包括横向滑座、横向丝杠、纵向滑座和纵向丝杠,横向滑座通过横向丝杠滑动连接于在底座上方,纵向滑座滑动通过纵向丝杠滑动连接于横向滑座上方,横向丝杠和纵向丝杠端部均设置有用驱动电机,焊接小型支架类结构件时,可大幅减少焊接机器人的关节运动,从而大幅降低焊接机器人在焊接小型支架类结构件时的使用成本。
技术研发人员:曹先锋,李衬衬,曹志辉,刘树辉,叶彬,高春光,黄帅基,刘丽
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:20230525
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!