一种平衡力臂机构的制作方法
本技术涉及机械加工相关,尤其涉及一种平衡力臂机构。
背景技术:
1、冰箱压缩机是一种将低压气体提升为高压气体的从动的流体机械,是制冷系统的心脏。它从吸气管吸入低温低压的制冷剂气体,通过电机运转带动活塞对其进行压缩后,向排气管排出高温高压的制冷剂气体,为制冷循环提供动力。压缩机在加工过程中一般是装在托盘内在流水线上运行的,在到达了加工工站之后需要用到抓取机构进行上料处理。
2、经过海量检索,发现现有技术公开号为cn205310256u,公开了一种用于压缩机圆周焊接的上料机械手,包括门形支架、活动支架、升降臂及气缸,所述活动支架通过第一滑轨设置在门形支架的横梁的一侧,活动支架沿第一滑轨横向滑动。活动支架远离横梁的一侧安装有竖向的第二滑轨,升降臂通过第二滑轨设置在活动支架上,升降臂相对于活动支架竖向滑动。升降臂的下端具有下横梁,气缸有两个,左右对称安装在下横梁的底部,每个气缸的底部设置有一对端板,每对端板由气缸控制,沿其导向轴横向相互靠近或远离。每个端板的下端固定安装有一个夹爪,气缸控制其下方的一对夹爪张开或闭合。该上料机械手结构简单,成本较低,维修方便,性能稳定,提高生产效率,保证产品品质,降低产品不良率。
3、综上所述,现有的上料机械手仅仅可以实现夹取机构在水平方向和竖直方向上的移动,活动范围有限,在使用过程中的适用性较差。
4、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种平衡力臂机构,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本实用新型的目的是提供一种平衡力臂机构。
2、为实现上述目的,本实用新型采用如下技术方案:
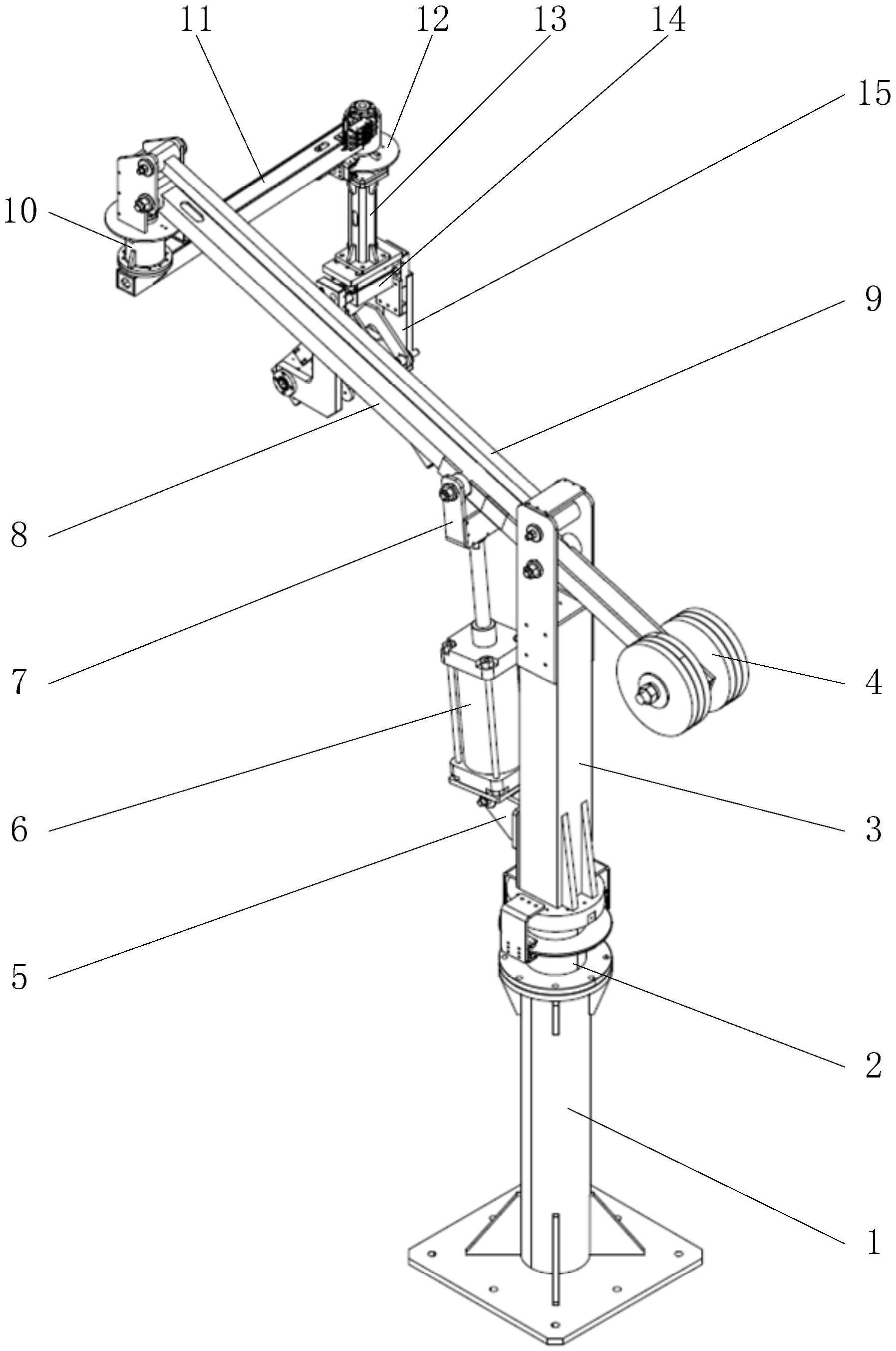
3、一种平衡力臂机构,包括机构固定柱、旋转机械臂机构和夹取机构,机构固定柱上安装有旋转机械臂机构,旋转机械臂机构上安装有夹取机构;
4、旋转机械臂机构包括第一旋转臂、横梁臂、第二旋转臂和第三旋转臂,第一旋转臂的底部通过第一旋转支撑轴承和第一旋转支撑座安装在机构固定柱上,第一旋转臂的顶部铰接有横梁臂,第一旋转臂上靠近横梁臂的一侧安装有顶升气缸,顶升气缸的底部通过顶升气缸座安装在第一旋转臂上,顶升气缸顶部的顶升气缸浮动接头与上方的横梁臂铰接,横梁臂的第一端与第二旋转支撑座铰接,第二旋转支撑座通过第二旋转支撑轴承与第二旋转臂的第一端相连接,第三旋转支撑座通过第三旋转支撑轴承与第二旋转臂的第二端相连接,第三旋转支撑座的底部安装有第三旋转臂,第三旋转臂的底部安装有夹取机构;
5、夹取机构包括夹爪气缸、夹紧活动板和夹爪,夹爪气缸安装在第三旋转臂的底部,夹爪气缸为双向气缸,夹爪气缸两侧的驱动端分别安装有夹紧活动板,夹紧活动板的底部安装有夹爪,夹爪通过夹爪旋转轴座安装在夹紧活动板的底部。
6、作为本实用新型的进一步改进,横梁臂的第二端安装有配重块。
7、作为本实用新型的进一步改进,两个夹爪之间通过夹爪同步连杆连接在一起,夹爪同步连杆上远离夹爪的一侧设置有扶手杆。
8、作为本实用新型的进一步改进,横梁臂的上方设置有拉杆臂,拉杆臂的第一端与第一旋转臂的顶部铰接,拉杆臂的第二端与第二旋转支撑座铰接。
9、作为本实用新型的进一步改进,第一旋转支撑轴承和第一旋转支撑座之间设置有第一刹车机构,第二旋转支撑轴承和第二旋转支撑座之间设置有第二刹车机构,第三旋转支撑轴承和第三旋转支撑座之间设置有第三刹车机构。
10、作为本实用新型的进一步改进,第一刹车机构包括第一刹车片和第一刹车气缸,第一旋转支撑轴承上沿着圆周方向均匀的安装有若干个第一支架,第一支架的底部安装有第一刹车气缸,第一旋转支撑座上设置有第一刹车片,第一刹车气缸的两个刹车夹块分别位于第一刹车片的上方和下方位置;
11、第二刹车机构包括第二刹车片和第二刹车气缸,第二旋转支撑座上设置有第二刹车片,第二刹车片一侧的第二旋转臂上设置有第二支架,第二支架靠近第二刹车片一侧的顶部安装有第二刹车气缸,第二刹车气缸的两个刹车夹块分别位于第二刹车片的上方和下方位置;
12、第三刹车机构包括第三刹车气缸和第三刹车片,第三旋转支撑座上设置有第三刹车片,第三刹车片一侧的第二旋转臂的底部设置有第三支架,第三支架靠近第三刹车片一侧的底部安装有第三刹车气缸,第三刹车气缸的两个刹车夹块分别位于第三刹车片的上方和下方位置。
13、借由上述方案,本实用新型至少具有以下优点:
14、本实用新型的旋转机械臂机构通过第一旋转臂、横梁臂、第二旋转臂1和第三旋转臂的组合结构,可以实现夹取机构升降以及多轴移动和旋转处理,增加了活动范围,提高了适用性;本实用新型的夹爪可旋转设计,同时通过扶手杆的结构,可以方便在压缩机下料时进行人工辅助调节处理。
15、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种平衡力臂机构,包括机构固定柱(1)、旋转机械臂机构和夹取机构,所述机构固定柱(1)上安装有旋转机械臂机构,所述旋转机械臂机构上安装有夹取机构;其特征在于:
2.如权利要求1所述的一种平衡力臂机构,其特征在于,所述横梁臂(8)的第二端安装有配重块(4)。
3.如权利要求1所述的一种平衡力臂机构,其特征在于,两个所述夹爪(17)之间通过夹爪同步连杆(31)连接在一起,所述夹爪同步连杆(31)上远离夹爪(17)的一侧设置有扶手杆(18)。
4.如权利要求1所述的一种平衡力臂机构,其特征在于,所述横梁臂(8)的上方设置有拉杆臂(9),所述拉杆臂(9)的第一端与第一旋转臂(3)的顶部铰接,所述拉杆臂(9)的第二端与第二旋转支撑座(10)铰接。
5.如权利要求1所述的一种平衡力臂机构,其特征在于,所述第一旋转支撑轴承(22)和第一旋转支撑座(2)之间设置有第一刹车机构,所述第二旋转支撑轴承(24)和第二旋转支撑座(10)之间设置有第二刹车机构,所述第三旋转支撑轴承(29)和第三旋转支撑座(12)之间设置有第三刹车机构。
6.如权利要求5所述的一种平衡力臂机构,其特征在于,所述第一刹车机构包括第一刹车片(19)和第一刹车气缸(20),所述第一旋转支撑轴承(22)上沿着圆周方向均匀的安装有若干个第一支架(21),所述第一支架(21)的底部安装有第一刹车气缸(20),所述第一旋转支撑座(2)上设置有第一刹车片(19),所述第一刹车气缸(20)的两个刹车夹块分别位于第一刹车片(19)的上方和下方位置;
技术总结
本技术涉及一种平衡力臂机构,包括机构固定柱、旋转机械臂机构和夹取机构,机构固定柱上安装有旋转机械臂机构,旋转机械臂机构上安装有夹取机构;旋转机械臂机构包括第一旋转臂、横梁臂、第二旋转臂和第三旋转臂;夹取机构包括夹爪气缸、夹紧活动板和夹爪。本技术的旋转机械臂机构通过第一旋转臂、横梁臂、第二旋转臂1和第三旋转臂的组合结构,可以实现夹取机构升降以及多轴移动和旋转处理,增加了活动范围,提高了适用性;本技术的夹爪可旋转设计,同时通过扶手杆的结构,可以方便在压缩机下料时进行人工辅助调节处理。
技术研发人员:凌建,曹紫玄,徐钊
受保护的技术使用者:苏州朗邦自动化科技股份有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!