一种激光焊接机器人光纤支架的制作方法
本技术涉及复合机床,具体为一种激光焊接机器人光纤支架。
背景技术:
1、激光焊接机器人在使用过程需安装光纤,光纤随焊接机器人摆动头在焊接过程需各种角度摆动,传统的光纤安装方式是将光纤和拖链一起固定在机器人臂上,传统的安装方式无法实现光纤与激光焊接摆动头做摆动、跟随运动,使用过程容易造成光纤扭转过度造成光纤损坏。
2、基于此,本实用新型设计了一种激光焊接机器人光纤支架,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种激光焊接机器人光纤支架,以解决上述背景技术中提出的光纤与激光焊接摆动头做摆动、跟随运动容易造成光纤扭转过度造成损坏的问题。
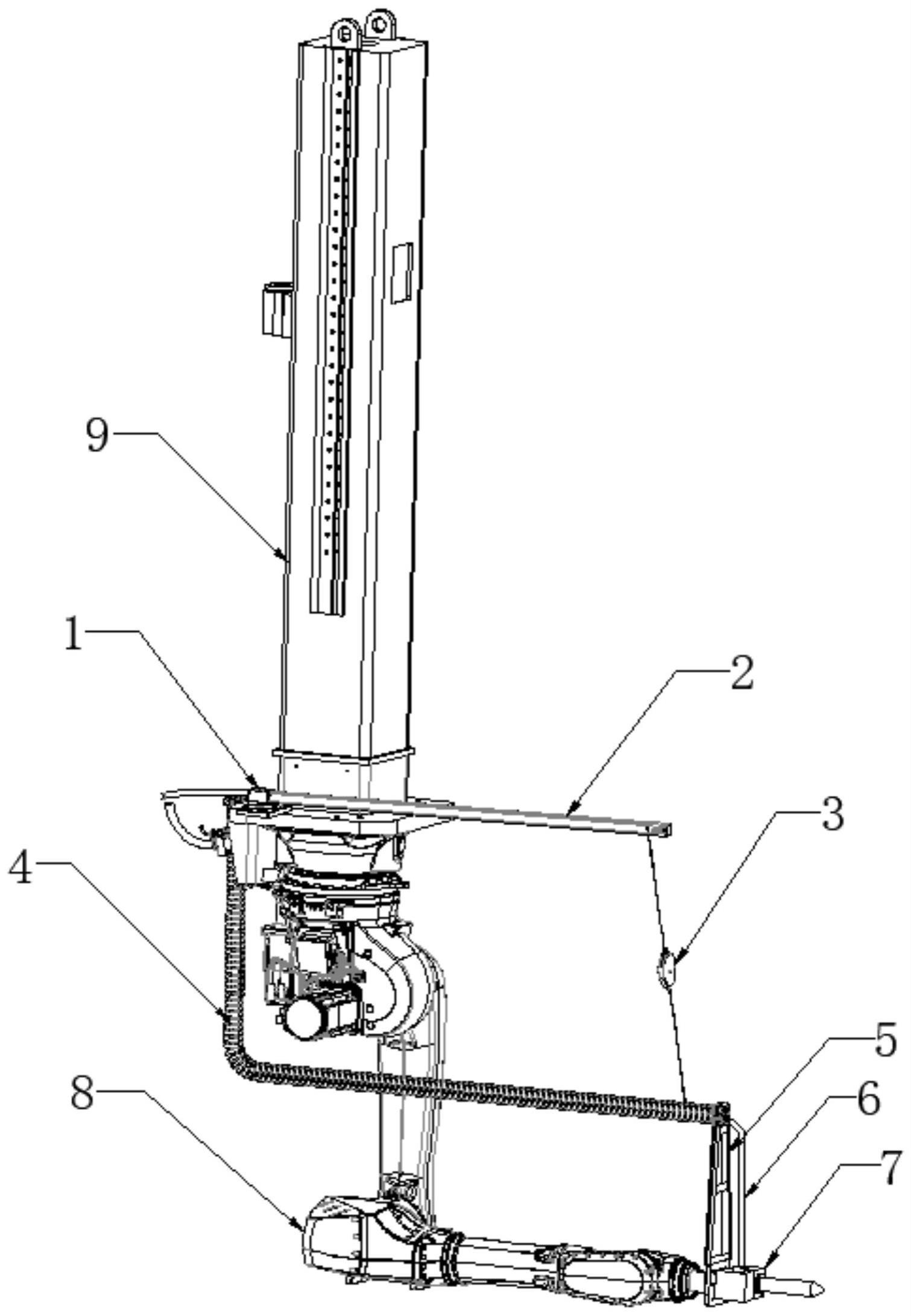
2、为实现上述目的,本实用新型提供如下技术方案:一种激光焊接机器人光纤支架,包括拖链、光纤和安装在滑枕上的激光焊接机器人,所述激光焊接机器人末端安装有激光焊接摆动头,所述激光焊接摆动头上安装有拖链支撑架,所述滑枕上通过支架旋转支座旋转连接有支架,所述拖链两端分别与滑枕、拖链支撑架连接,所述支架和拖链靠近拖链支撑架的任意位置之间连接有拉力器,所述拖链用于穿光纤。
3、优选的,所述拖链采用龙骨式拖链。
4、优选的,所述支架旋转支座内置轴承与支架旋转连接。
5、现有技术相比,本实用新型的有益效果是:本实用新型解决了拖链与激光焊接机器人缠绕的问题,同时使拖链能跟随激光焊接机器人运动;防止了光纤过度扭转,实现光纤与激光焊接摆动头做旋转运动;使用龙骨式拖链方便电缆、光纤的拆装;拉力器使拖链和光纤、电缆具有缓冲。
技术特征:
1.一种激光焊接机器人光纤支架,包括拖链(4)、光纤(6)和安装在滑枕(9)上的激光焊接机器人(8),其特征在于:所述激光焊接机器人(8)末端安装有激光焊接摆动头(7),所述激光焊接摆动头(7)上安装有拖链支撑架(5),所述滑枕(9)上通过支架旋转支座(1)旋转连接有支架(2),所述拖链(4)两端分别与滑枕(9)、拖链支撑架(5)连接,所述支架(2)和拖链(4)靠近拖链支撑架(5)的任意位置之间连接有拉力器(3),所述拖链(4)用于穿光纤(6)。
2.根据权利要求1所述的一种激光焊接机器人光纤支架,其特征在于:所述拖链(4)采用龙骨式拖链。
3.根据权利要求1所述的一种激光焊接机器人光纤支架,其特征在于:所述支架旋转支座(1)内置轴承与支架(2)旋转连接。
技术总结
本技术公开了复合机床技术领域一种激光焊接机器人光纤支架,包括拖链、光纤和安装在滑枕上的激光焊接机器人,激光焊接机器人末端安装有激光焊接摆动头,激光焊接摆动头上安装有拖链支撑架,滑枕上通过支架旋转支座旋转连接有支架,拖链两端分别与滑枕、拖链支撑架连接,支架和拖链靠近拖链支撑架的任意位置之间连接有拉力器,拖链用于穿光纤,本技术解决了拖链与激光焊接机器人缠绕的问题,同时使拖链能跟随激光焊接机器人运动;防止了光纤过度扭转,实现光纤与激光焊接摆动头做旋转运动。
技术研发人员:鄢世平,姜春泉,叶方勤,薛松海,占稳,叶明,林家景
受保护的技术使用者:中国机械总院集团海西(福建)分院有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!