一种摇臂钻床的钻孔定位工装的制作方法
本技术涉及摇臂钻床定位,尤其是一种摇臂钻床的钻孔定位工装。
背景技术:
1、摇臂钻床是一种摇臂可绕立柱回转和升降,通常主轴箱在摇臂上作水平移动的钻床。
2、目前的的摇臂钻床主轴箱,采用七级齿轮传动,实现主运动,后通过六级齿轮传动实现进给运动,齿轮传动级数多,传动结构复杂,制造及安装精度要求高,振动和噪声较大,为此,我们提出一种摇臂钻床的钻孔定位工装解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种摇臂钻床的钻孔定位工装,以解决上述背景技术中提出目前的的摇臂钻床主轴箱,采用七级齿轮传动,实现主运动,后通过六级齿轮传动实现进给运动,齿轮传动级数多,传动结构复杂,制造及安装精度要求高,振动和噪声较大的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
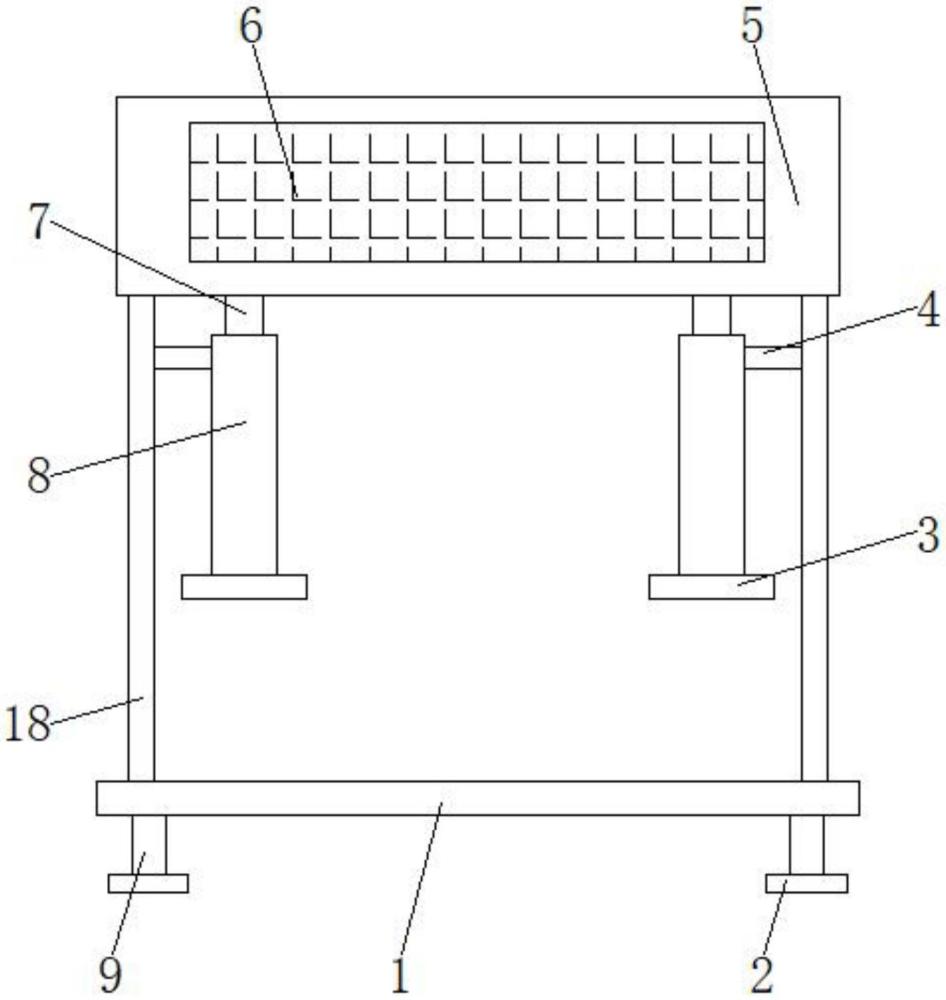
3、一种摇臂钻床的钻孔定位工装,包括底板,所述底板的上表面固定连接有两个立板,两个所述立板的上表面共同固定连接有箱体,所述箱体的内底壁安装有电机,所述电机的输出端固定连接有第一齿轮,所述箱体的内顶壁固定镶嵌有两个第一轴承,每个所述第一轴承的内圈均固定连接有转动轴,每个所述转动轴的底端均固定连接有第二齿轮,所述箱体的底面固定镶嵌有两个第二轴承,每个所述第二轴承的内圈均固定连接有螺纹杆,每个所述螺纹杆的顶端均固定连接有第三齿轮,每个所述螺纹杆的外表面螺纹连接有螺纹筒,每个所述螺纹筒的底端均固定连接有压板。
4、在进一步的实施例中,每个所述第二齿轮均与第一齿轮相啮合,每个所述第三齿轮均与第二齿轮相啮合。
5、在进一步的实施例中,两个所述立板相互靠近的一侧面均开设有滑槽,每个所述滑槽的内壁均滑动连接有滑块,两个所述滑块相互靠近的一端分别与两个螺纹筒的外表面固定连接。
6、在进一步的实施例中,所述箱体的正面设有指示牌,所述指示牌的背面与箱体的正面相粘接。
7、在进一步的实施例中,所述底板的底面固定连接有两组支块,每个所述支块的底端均固定连接有基座。
8、与现有技术相比,本实用新型的有益效果是:
9、本装置通过设置的电机、第一齿轮、第二齿轮、第三齿轮、螺纹杆与螺纹筒的配合,利用电机的工作,能够让第三齿轮带动螺纹杆在螺纹筒的内部转动,螺纹筒便会带动压板下降对加工件压持定位,采用三级齿轮传动,传动级数少,传动效率、精度高,损坏率低。
技术特征:
1.一种摇臂钻床的钻孔定位工装,其特征在于:包括底板(1),所述底板(1)的上表面固定连接有两个立板(18),两个所述立板(18)的上表面共同固定连接有箱体(5),所述箱体(5)的内底壁安装有电机(14),所述电机(14)的输出端固定连接有第一齿轮(12),所述箱体(5)的内顶壁固定镶嵌有两个第一轴承(11),每个所述第一轴承(11)的内圈均固定连接有转动轴(13),每个所述转动轴(13)的底端均固定连接有第二齿轮(15),所述箱体(5)的底面固定镶嵌有两个第二轴承(16),每个所述第二轴承(16)的内圈均固定连接有螺纹杆(7),每个所述螺纹杆(7)的顶端均固定连接有第三齿轮(10),每个所述螺纹杆(7)的外表面螺纹连接有螺纹筒(8),每个所述螺纹筒(8)的底端均固定连接有压板(3)。
2.根据权利要求1所述的一种摇臂钻床的钻孔定位工装,其特征在于:每个所述第二齿轮(15)均与第一齿轮(12)相啮合,每个所述第三齿轮(10)均与第二齿轮(15)相啮合。
3.根据权利要求1所述的一种摇臂钻床的钻孔定位工装,其特征在于:两个所述立板(18)相互靠近的一侧面均开设有滑槽(17),每个所述滑槽(17)的内壁均滑动连接有滑块(4),两个所述滑块(4)相互靠近的一端分别与两个螺纹筒(8)的外表面固定连接。
4.根据权利要求1所述的一种摇臂钻床的钻孔定位工装,其特征在于:所述箱体(5)的正面设有指示牌(6),所述指示牌(6)的背面与箱体(5)的正面相粘接。
5.根据权利要求1所述的一种摇臂钻床的钻孔定位工装,其特征在于:所述底板(1)的底面固定连接有两组支块(9),每个所述支块(9)的底端均固定连接有基座(2)。
技术总结
本技术公开了一种摇臂钻床的钻孔定位工装,包括底板,所述底板的上表面固定连接有两个立板,两个所述立板的上表面共同固定连接有箱体,所述箱体的内底壁安装有电机,所述电机的输出端固定连接有第一齿轮,所述箱体的内顶壁固定镶嵌有两个第一轴承,每个所述第一轴承的内圈均固定连接有转动轴,每个所述转动轴的底端均固定连接有第二齿轮,所述箱体的底面固定镶嵌有两个第二轴承。本装置通过设置的电机、第一齿轮、第二齿轮、第三齿轮、螺纹杆与螺纹筒的配合,利用电机的工作,能够让第三齿轮带动螺纹杆在螺纹筒的内部转动,螺纹筒便会带动压板下降对加工件压持定位,采用三级齿轮传动,传动级数少,传动效率、精度高,损坏率低。
技术研发人员:谯川,姜庆凯,董威,常亮,杜洪亮,高天翔,孙旭
受保护的技术使用者:沈阳海克机床有限公司
技术研发日:20230614
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!