一种柔性机械手卡爪装置的制作方法
本技术涉及机械手卡爪,具体为一种柔性机械手卡爪装置。
背景技术:
1、为满足变速箱不同功用的要求,变速箱的品种越来越多,对应的零件结构尺寸设计不一,这对零件加工工装的柔性要求较高。搓丝机加工过程中对工件的上、下料需要使用机械手卡爪抓取工件外径将工件移动到加工位,卡爪的松开、夹紧行程由位移传感器控制。
2、经检索,中国专利授权号为cn 218134708 u的专利,公开了柔性机械手卡爪装置,包括壳体,所述壳体的左侧面固定连接有转动电机,所述转动电机的输出端固定连接有双向螺旋螺纹杆,所述双向螺旋螺纹杆伸进壳体内,所述双向螺旋螺纹杆两端的螺纹处均螺纹套接有移动套,所述移动套的下表面固定连接有支撑杆,所述支撑杆的一端固定连接有插接座,所述壳体的下表面设有移动槽,所述插接座内插接有插接杆,所述插接杆的一端固定连接有连接杆,所述连接杆的一端固定连接有卡爪,所述插接座的前后两侧面均设有固定机构,左侧所述插接座的右侧面设有位移传感器,本实用新型,具有实用性强和便于更换卡爪的特点;但依然存在的问题是现有的机械手卡爪在对工件进行抓取时,机械手卡爪硬度强,且减震效果差,而在进行抓取时容易出现对工件造成损坏,导致其在使用过程中存在一定的局限性。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种柔性机械手卡爪装置,解决了背景技术中所提出的减震效果差,而在进行抓取时容易出现对工件造成损坏的问题。
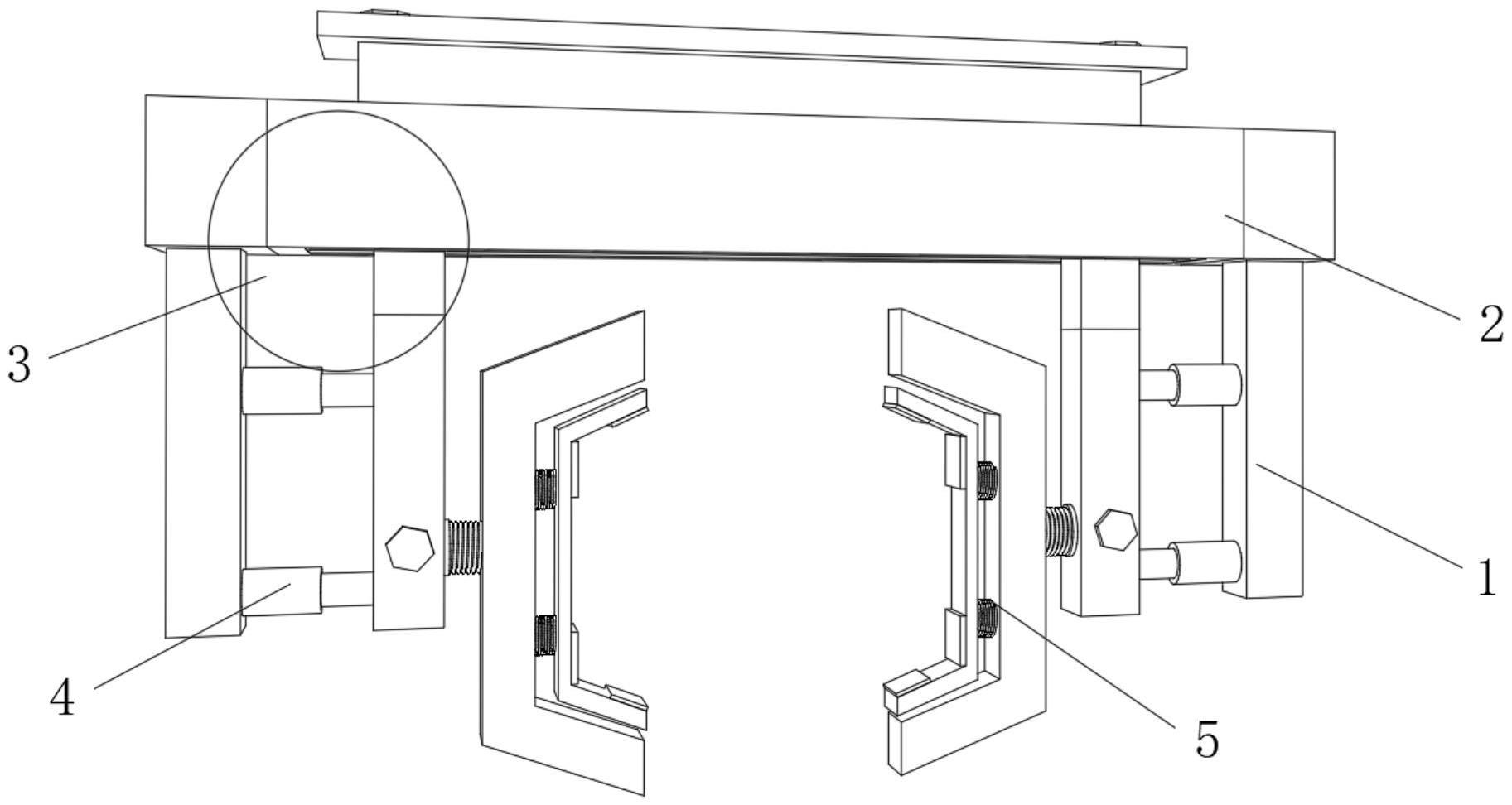
2、为实现以上目的,本实用新型通过以下技术方案予以实现:本实用新型提供了一种柔性机械手卡爪装置,包括装置本体和壳体,所述壳体底部通过移动组件连接有减震组件,所述减震组件包括第一卡爪、阻尼器、减震弹簧、第二卡爪、第一橡胶垫和第二橡胶垫,所述第一卡爪共设置有两组,且第一卡爪一端均设置有阻尼器,所述阻尼器一侧均设置有两组,所述阻尼器外壁均环绕连接有减震弹簧,所述减震弹簧一端均固定连接有第二卡爪,所述第二卡爪一侧中间位置均设置有第一橡胶垫,且第一橡胶垫一侧均设置有第二橡胶垫。
3、优选的,所述壳体底部设置有移动组件,所述移动组件包括电机盒、驱动电机、滑槽、丝杆、滑块、固定座和限位块,所述壳体底部开设有滑槽,且壳体两端对称设置有电机盒。
4、优选的,所述电机盒内部均放置有驱动电机,所述驱动电机一侧传动连接有丝杆,所述丝杆它通过轴承安装在滑槽内部,所述丝杆外壁通过螺纹连接有滑块,且滑块底部固定连接有固定座,且丝杆一端固定连接有限位块。
5、优选的,所述壳体底部设置有辅助组件,所述辅助组件包括安装柱、伸缩杆、连接柱、通孔、安装座、弹簧、螺纹孔和螺栓。
6、优选的,所述电机盒底部均固定连接有安装柱,且固定座底部均固定连接有连接柱,且安装柱和连接柱之间均固定连接有伸缩杆。
7、优选的,所述连接柱一端均开设有通孔,且通孔与安装座卡合连接,所述安装座一侧开设有螺纹孔且与螺栓通过螺纹连接,所述安装座一端套接有弹簧。
8、本实用新型提供了一种柔性机械手卡爪装置。具备以下有益效果:该一种柔性机械手卡爪装置,通过减震组件的设置,使得机械手卡爪的抓取工件时稳定性提升,同时避免对工件造成损坏,从而进一步提高了该柔性机械手卡爪装置的实用性,使得该装置使用更加便捷。
技术特征:
1.一种柔性机械手卡爪装置,包括装置本体(1)和壳体(2),其特征在于:所述壳体(2)底部通过移动组件(3)连接有减震组件(5),所述减震组件(5)包括第一卡爪(51)、阻尼器(52)、减震弹簧(53)、第二卡爪(54)、第一橡胶垫(55)和第二橡胶垫(56),所述第一卡爪(51)共设置有两组,且第一卡爪(51)一端均设置有阻尼器(52),所述阻尼器(52)一侧均设置有两组,所述阻尼器(52)外壁均环绕连接有减震弹簧(53),所述减震弹簧(53)一端均固定连接有第二卡爪(54),所述第二卡爪(54)一侧中间位置均设置有第一橡胶垫(55),且第一橡胶垫(55)一侧均设置有第二橡胶垫(56)。
2.根据权利要求1所述的一种柔性机械手卡爪装置,其特征在于:所述壳体(2)底部设置有移动组件(3),所述移动组件(3)包括电机盒(31)、驱动电机(32)、滑槽(33)、丝杆(34)、滑块(35)、固定座(36)和限位块(37),所述壳体(2)底部开设有滑槽(33),且壳体(2)两端对称设置有电机盒(31)。
3.根据权利要求2所述的一种柔性机械手卡爪装置,其特征在于:所述电机盒(31)内部均放置有驱动电机(32),所述驱动电机(32)一侧传动连接有丝杆(34),所述丝杆(34)它通过轴承安装在滑槽(33)内部,所述丝杆(34)外壁通过螺纹连接有滑块(35),且滑块(35)底部固定连接有固定座(36),且丝杆(34)一端固定连接有限位块(37)。
4.根据权利要求1所述的一种柔性机械手卡爪装置,其特征在于:所述壳体(2)底部设置有辅助组件(4),所述辅助组件(4)包括安装柱(41)、伸缩杆(42)、连接柱(43)、通孔(44)、安装座(45)、弹簧(46)、螺纹孔(47)和螺栓(48)。
5.根据权利要求2所述的一种柔性机械手卡爪装置,其特征在于:所述电机盒(31)底部均固定连接有安装柱(41),且固定座(36)底部均固定连接有连接柱(43),且安装柱(41)和连接柱(43)之间均固定连接有伸缩杆(42)。
6.根据权利要求4所述的一种柔性机械手卡爪装置,其特征在于:所述连接柱(43)一端均开设有通孔(44),且通孔(44)与安装座(45)卡合连接,所述安装座(45)一侧开设有螺纹孔(47)且与螺栓(48)通过螺纹连接,所述安装座(45)一端套接有弹簧(46)。
技术总结
本技术公开了一种柔性机械手卡爪装置,涉及机械手卡爪技术领域,包括装置本体和壳体,所述壳体底部通过移动组件连接有减震组件,所述减震组件包括第一卡爪、阻尼器、减震弹簧、第二卡爪、第一橡胶垫和第二橡胶垫,所述第一卡爪共设置有两组,且第一卡爪一端均设置有阻尼器,所述阻尼器一侧均设置有两组,所述阻尼器外壁均环绕连接有减震弹簧,所述减震弹簧一端均固定连接有第二卡爪,所述第二卡爪一侧中间位置均设置有第一橡胶垫,该一种柔性机械手卡爪装置,通过减震组件的设置,使得机械手卡爪的抓取工件时稳定性提升,同时避免对工件造成损坏,从而进一步提高了该柔性机械手卡爪装置的实用性,使得该装置使用更加便捷。
技术研发人员:蔡亚先,刘保荣,张俊,张莉
受保护的技术使用者:昆山恒科自动化设备有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!