多接缝大型储罐内部智能焊接机器人的制作方法
本技术涉及焊接设备,具体为多接缝大型储罐内部智能焊接机器人。
背景技术:
1、焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
2、经检索,专利号为cn209716725u的一种焊接机器人安装结构及焊接系统,涉及焊接装置领域,为实现安装方便,提高焊接质量,达到线路布局简单合理,避免由于线路折损造成安全隐患,降低故障率的目的。本实用新型包括机器人本体、焊丝存储器、第1送丝机、送丝导管、焊丝缓冲装置、第2送丝机、焊枪和焊丝;所述第2送丝机连接焊枪;所述焊丝缓冲装置一端承接送丝导管端,另一端连接所述第2送丝机,所述送丝导管端可驱动焊丝在焊丝缓冲装置中进行缓冲,所述第1送丝机设在基座轴上,所述焊丝按照顺序依次经过焊丝存储器、第1送丝机、送丝导管、焊丝缓冲装置、第2送丝机和焊枪。以及包含所述焊接机器人安装结构的焊接系统。
3、目前现有技术中,在使用智能焊接机器人对大型储罐内部的多个接缝进行焊接处理的时候,受到储罐内部相对密闭的空间限制,焊接过程伴随着刺激性甚至有毒性气体的产生,不方便监测和及时处理,存在很大的安全隐患的问题,因此,需要设计多接缝大型储罐内部智能焊接机器人解决上述问题。
技术实现思路
1、本实用新型的目的在于提供多接缝大型储罐内部智能焊接机器人,以解决上述背景技术中提出的问题。
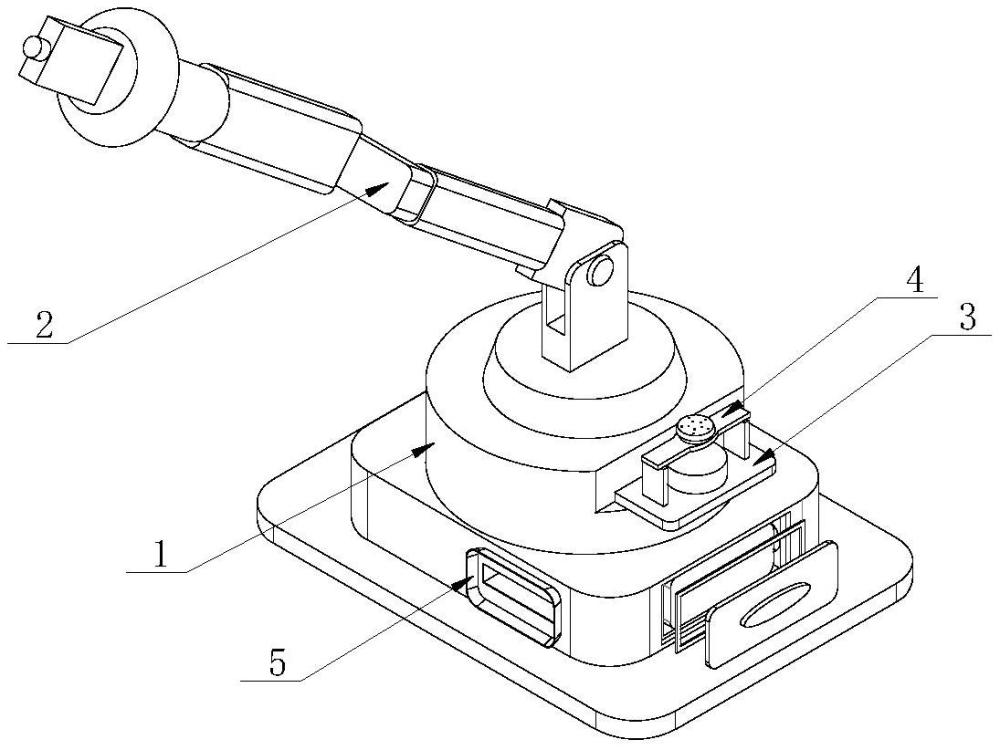
2、为实现上述目的,本实用新型提供如下技术方案:多接缝大型储罐内部智能焊接机器人,包括机座和机械臂,所述机座上方位置安装有机械臂;
3、所述机座表面安装有气体检测组件,所述气体检测组件包括载板和尾气监测仪,所述尾气监测仪固定连接在载板上表面,所述载板上方架设有支撑架,所述支撑架上方设置有吸气通孔,所述支撑架的吸气通孔位置通过装配环固定连接有抽气扇;
4、所述机座内部安装有尾气净化组件,所述尾气净化组件包括吸气罩、滤芯和排气扇,所述机座侧壁开设有净化槽,且机座表面设置有气体流道。
5、优选的,所述支撑架架设在尾气监测仪的上方位置,所述抽气扇位于尾气监测仪的检测端上方位置。
6、优选的,所述滤芯插接在机座的净化槽内部,所述机座的净化槽开口位置设置有台阶槽。
7、优选的,所述机座的台阶槽位置粘接有密封圈,所述密封圈位于滤芯的外侧位置。
8、优选的,所述机座的台阶槽位置卡接有盖板,所述盖板内表面与密封圈和滤芯相贴合,所述盖板外壁固定连接有牵引座。
9、优选的,所述机座的净化槽和机座表面的气体流道呈导通设置,所述气体流道两端延伸至机座的端面位置。
10、优选的,所述吸气罩安装在机座的气体流道进气端位置,所述排气扇安装在机座的气体流道排气端位置。
11、与现有技术相比,本实用新型的有益效果是:
12、1.在进行焊接处理的过程中,支撑架上方的抽气扇定向抽送焊接区域的尾气,加速气体流向尾气监测仪,尾气监测仪实时监测焊接区域的尾气浓度,并通过外接信号传输设备向罐体外部的显示屏发送尾气浓度数值,方便技术人员及时且准确的监测和记录罐体内部的尾气状态。
13、2.当尾气浓度数值超出标准值的时候,通过外接控制设备启动排气扇,罐体内部的尾气在吸气罩开口位置的负压作用下,沿着气体流道进入机座的净化槽内部,滤芯对尾气过滤净化处理,有效地净化空气,提高工作的安全性和舒适度;机座的台阶槽位置粘接有密封圈,密封圈位于滤芯的外侧位置,机座的台阶槽位置卡接有盖板,打开盖板,方便对滤芯检修和更换。
技术特征:
1.多接缝大型储罐内部智能焊接机器人,包括机座(1)和机械臂(2),其特征在于:所述机座(1)上方位置安装有机械臂(2);
2.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述支撑架(4)架设在尾气监测仪(11)的上方位置,所述抽气扇(10)位于尾气监测仪(11)的检测端上方位置。
3.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述滤芯(6)插接在机座(1)的净化槽内部,所述机座(1)的净化槽开口位置设置有台阶槽。
4.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述机座(1)的台阶槽位置粘接有密封圈(7),所述密封圈(7)位于滤芯(6)的外侧位置。
5.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述机座(1)的台阶槽位置卡接有盖板(8),所述盖板(8)内表面与密封圈(7)和滤芯(6)相贴合,所述盖板(8)外壁固定连接有牵引座。
6.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述机座(1)的净化槽和机座(1)表面的气体流道呈导通设置,所述气体流道两端延伸至机座(1)的端面位置。
7.根据权利要求1所述的多接缝大型储罐内部智能焊接机器人,其特征在于:所述吸气罩(5)安装在机座(1)的气体流道进气端位置,所述排气扇(9)安装在机座(1)的气体流道排气端位置。
技术总结
本技术涉及焊接设备技术领域,且公开了多接缝大型储罐内部智能焊接机器人,包括机座和机械臂,所述机座上方位置安装有机械臂;所述机座表面安装有气体检测组件,所述气体检测组件包括载板和尾气监测仪,所述尾气监测仪固定连接在载板上表面,所述载板上方架设有支撑架。尾气监测仪实时监测焊接区域的尾气浓度,并通过外接信号传输设备向罐体外部的显示屏发送尾气浓度数值,方便技术人员及时且准确的监测和记录罐体内部的尾气状态;通过外接控制设备启动排气扇,罐体内部的尾气在吸气罩开口位置的负压作用下,沿着气体流道进入机座的净化槽内部,滤芯对尾气过滤净化处理,有效地净化空气,提高工作的安全性和舒适度。
技术研发人员:杨昌,程新路,陈蓓蕾,许维宗,付义临,赵如帅
受保护的技术使用者:中建安装集团有限公司
技术研发日:20230629
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!