一种车灯锁紧模组的自动化装配结构的制作方法
本技术涉及一种车灯锁紧模组的自动化装配结构,属于车灯装配锁付。
背景技术:
1、自动化流水线车灯装配作业中,需要采用相应的电动螺丝刀或伺服螺丝刀对待装配的螺丝进行拧紧,相应的工作台和螺丝刀结构的布置位置通常如图1所示,电动螺丝刀设置于车灯装配平台的下方,螺丝刀头则用于拧紧具有一定位置高度的螺丝,因为装配高度需求较高,因此传统方式是在第一平台上夹固车灯时,首先将螺丝刀头部分进行避让,这样就使得在设计时电动螺丝枪的输出轴过长,导致在拧螺丝时容易发生不稳定的跑偏,影响自动化装配效果。
技术实现思路
1、本实用新型的目的在于克服现有技术中的不足,提供一种车灯锁紧模组的自动化装配结构,用于实现螺丝刀头避让的同时保障电动螺丝刀作用的稳定性,从而实现优化设备的使用效果。
2、为实现上述目的,本实用新型是采用下述技术方案实现的:
3、一方面,包括第一平台、第二平台、l型螺丝枪头以及伺服螺丝枪,所述第一平台用于对待加工的车灯进行夹固,所述l型螺丝枪头设置于所述第一平台上且经由第一动力组件控制使l型螺丝枪头可移动设置在第一平台的上表面,所述伺服螺丝枪经由第二动力组件控制可相对于第二平台进行升降移动,所述伺服螺丝枪端部的枪杆通过移动能够插接连接在l型螺丝枪头的一端,并用于驱动l型螺丝枪头端部的螺丝刀头发生转动。
4、具体的,还包括设置于第一平台和第二平台之间的第三平台,所述第三平台通过导向杆滑动设置于所述第二平台上,所述第二动力组件包括第一气缸,所述第一气缸固定安装在第二平台上,所述第一气缸的输出端与第三平台固定连接,所述伺服螺丝枪安装于所述第三平台上。
5、具体的,还包括伺服螺丝枪位置校准机构,所述校准机构包括第一滑轨模组以及滑动设置于第一滑轨模组上的安装板,所述伺服螺丝枪固定安装在所述安装板上,所述第三平台的一侧设置有第二气缸,所述第二气缸用于控制安装板在第一滑轨模组上往复移动。
6、具体的,所述伺服螺丝枪上设有定位板用于与安装板固定连接,所述定位板上开设有u型槽用于与安装板可调节装配。
7、具体的,所述u型槽两侧圆心的连线垂直于第一滑轨模组的滑动方向。
8、具体的,还包括支架,所述支架上设有第二滑轨模组,所述第二滑轨模组上滑动装配有避让架,所述l型螺丝枪头固定安装在所述避让架上,所述第一动力组件包括固定安装于避让架上的第三气缸,所述第三气缸用于驱动避让架在第二滑轨模组提供的滑动方向上进行滑移。
9、具体的,所述l型螺丝枪头的一端安装有连杆,所述连杆远离l型螺丝枪头的一端固定安装有联轴器,所述联轴器的通口侧设置有用于枪杆插设的导向孔。
10、具体的,所述l型螺丝枪头两侧的活动端通过两个倾角为°的锥形齿轮啮合装配。
11、与现有技术相比,本实用新型所达到的有益效果:
12、本实用新型通过将l型螺丝枪头和伺服螺丝枪进行拆解,使得装置在需要安装车灯的螺丝时,可以分别独立进行避让,此时由于l型螺丝枪头整体的稳定性受第一动力组件的作用把控,因此相较于伺服螺丝枪输出轴过长的情况,可以有效提升在拧螺丝时作用的稳定性,使其具有更优的使用效果。
技术特征:
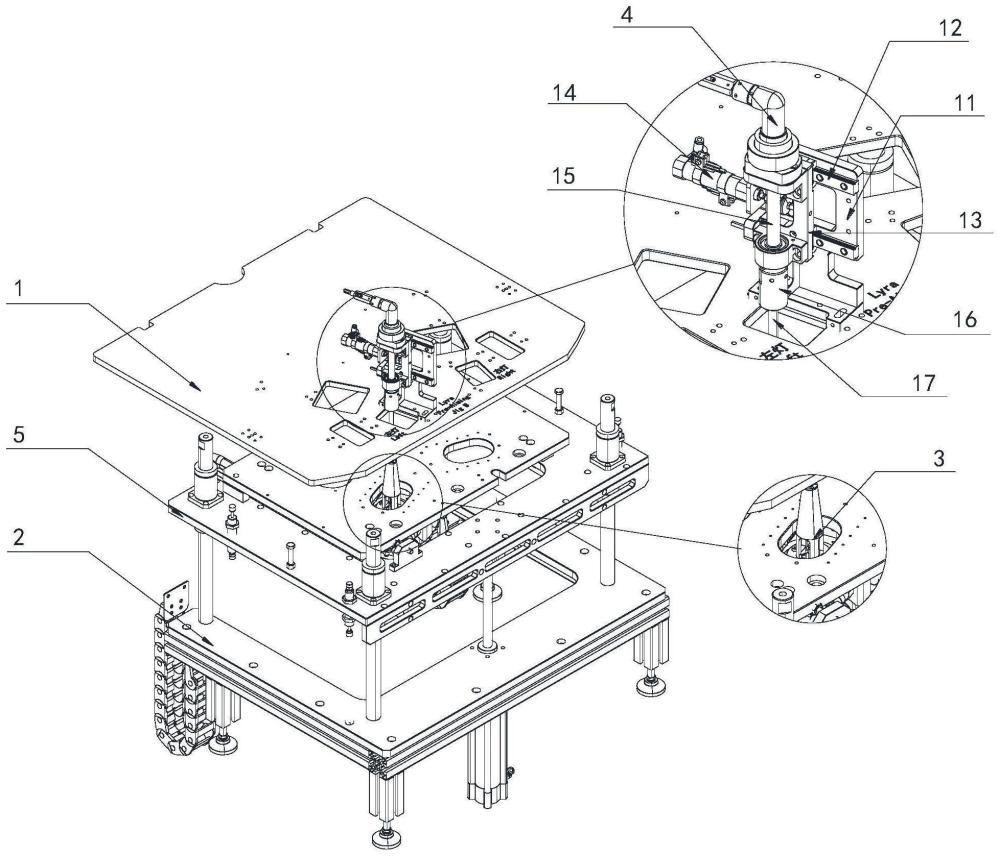
1.一种车灯锁紧模组的自动化装配结构,其特征在于,包括第一平台(1)、第二平台(2)、l型螺丝枪头(4)以及伺服螺丝枪(3),所述第一平台(1)用于对待加工的车灯进行夹固,所述l型螺丝枪头(4)设置于所述第一平台(1)上且经由第一动力组件控制使l型螺丝枪头(4)可移动设置在第一平台(1)的上表面,所述伺服螺丝枪(3)经由第二动力组件控制可相对于第二平台(2)进行升降移动,所述伺服螺丝枪(3)端部的枪杆(17)通过移动能够插接连接在l型螺丝枪头(4)的一端,并用于驱动l型螺丝枪头(4)端部的螺丝刀头发生转动。
2.根据权利要求1所述的一种车灯锁紧模组的自动化装配结构,其特征在于,还包括设置于第一平台(1)和第二平台(2)之间的第三平台(5),所述第三平台(5)通过导向杆滑动设置于所述第二平台(2)上,所述第二动力组件包括第一气缸(6),所述第一气缸(6)固定安装在第二平台(2)上,所述第一气缸(6)的输出端与第三平台(5)固定连接,所述伺服螺丝枪(3)安装于所述第三平台(5)上。
3.根据权利要求2所述的一种车灯锁紧模组的自动化装配结构,其特征在于,还包括伺服螺丝枪(3)位置校准机构,所述校准机构包括第一滑轨模组(7)以及滑动设置于第一滑轨模组(7)上的安装板(8),所述伺服螺丝枪(3)固定安装在所述安装板(8)上,所述第三平台(5)的一侧设置有第二气缸(9),所述第二气缸(9)用于控制安装板(8)在第一滑轨模组(7)上往复移动。
4.根据权利要求3所述的一种车灯锁紧模组的自动化装配结构,其特征在于,所述伺服螺丝枪(3)上设有定位板用于与安装板(8)固定连接,所述定位板上开设有u型槽(10)用于与安装板(8)可调节装配。
5.根据权利要求4所述的一种车灯锁紧模组的自动化装配结构,其特征在于,所述u型槽(10)两侧圆心的连线垂直于第一滑轨模组(7)的滑动方向。
6.根据权利要求1所述的一种车灯锁紧模组的自动化装配结构,其特征在于,还包括支架(11),所述支架(11)上设有第二滑轨模组(12),所述第二滑轨模组(12)上滑动装配有避让架(13),所述l型螺丝枪头(4)固定安装在所述避让架(13)上,所述第一动力组件包括固定安装于避让架(13)上的第三气缸(14),所述第三气缸(14)用于驱动避让架(13)在第二滑轨模组(12)提供的滑动方向上进行滑移。
7.根据权利要求1所述的一种车灯锁紧模组的自动化装配结构,其特征在于,所述l型螺丝枪头(4)的一端安装有连杆(15),所述连杆(15)远离l型螺丝枪头(4)的一端固定安装有联轴器(16),所述联轴器(16)的通口侧设置有用于枪杆(17)插设的导向孔。
8.根据权利要求1所述的一种车灯锁紧模组的自动化装配结构,其特征在于,所述l型螺丝枪头(4)两侧的活动端通过两个倾角为45°的锥形齿轮啮合装配。
技术总结
本技术公开了车灯装配锁付技术领域的一种车灯锁紧模组的自动化装配结构,旨在解决现有技术中用于旋紧车灯螺丝的驱动杆过长而导致锁付效果不稳定的问题。其第一平台、第二平台、L型螺丝枪头以及伺服螺丝枪,所述第一平台用于对待加工的车灯进行夹固,所述L型螺丝枪头设置于所述第一平台上且经由第一动力组件控制使L型螺丝枪头可移动设置在第一平台的上表面,所述伺服螺丝枪可相对于第二平台进行升降移动,所述伺服螺丝枪端部的枪杆通过移动能够插接连接在L型螺丝枪头的一端,并用于驱动L型螺丝枪头端部的螺丝刀头发生转动;本技术用于实现螺丝刀头避让的同时保障电动螺丝刀作用的稳定性,从而实现优化设备的使用效果。
技术研发人员:邵冉
受保护的技术使用者:苏州奥科姆自动化科技有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!