一种机器人自动焊接以及人防门的制作方法
本技术具体涉及一种机器人自动焊接以及人防门。
背景技术:
1、人防门在生产加工的过程中,通过将分隔钢架焊接于两组钢门板内部,同时在分隔钢架内部填充保温材质或者是混凝土,以提升整体的强度和隔音效果,而分隔钢架与钢门板采用环绕式焊接进行安装。
2、现在很多都是通过操作人员手持焊接设备,沿着连接位置进行整圈焊接,焊接过程需要保持连续,经常会存在焊缝,需要二次补焊,同时焊接过程需要对一组钢板焊接后,再次进行翻转焊接另一侧,工件移动和定位过程非常麻烦,为此特提供一种机器人自动焊接以及人防门。
技术实现思路
1、本实用新型的目的在于针对现有技术的不足之处,提供一种机器人自动焊接以及人防门,方便进行连续焊接,同时便于对工件进行定位和移动。
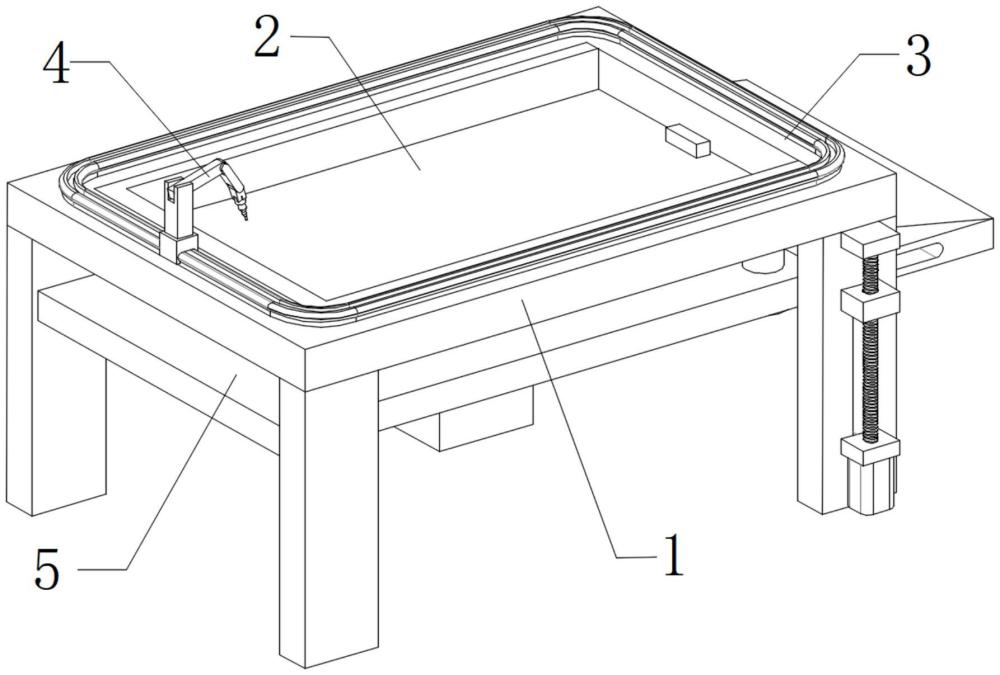
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种机器人自动焊接以及人防门,包括焊接台和设置在焊接台顶部的移动式焊接机器臂,所述焊接台的底部设置有一组可翻转的载板,所述载板的顶部设置有可上下移动的焊接定位架,所述焊接定位架的前端设置有用于定位的挡块,所述挡块的底部安装有用于推动挡块上下活动的伺服液压缸。
3、优选的,所述焊接台的顶部固定安装有滑轨,所述移动式焊接机器臂滑动连接在滑轨的外表面。
4、优选的,所述载板的下表面固定安装有顶升液压缸,所述顶升液压缸的输出端贯穿载板,且顶升液压缸的输出端与焊接定位架固定连接。
5、优选的,所述焊接定位架的四角底部均固定连接有定位轴,所述定位轴贯穿载板。
6、优选的,所述焊接定位架的前端底部固定焊接有u形固定架,所述伺服液压缸固定安装在u形固定架的顶部,所述u形固定架贯穿载板。
7、优选的,所述载板的前端固定连接有倾斜滑板,所述载板的前端内部设置有支撑轴,所述支撑轴滑动连接在焊接台的内底部。
8、优选的,所述焊接台的底端侧面开设有滑槽,所述支撑轴滑动连接在滑槽的内部,所述滑槽的外表面安装有用于提升支撑轴的提升电机。
9、优选的,所述滑槽的外表面转动连接有提升螺柱,所述提升螺柱与提升电机的输出端固定连接,所述支撑轴的两端均转动连接有连接块,所述连接块螺纹连接在提升螺柱的外表面。
10、优选的,所述人防门包括分隔钢架和人防门门板,所述分隔钢架与人防门门板焊接时置于焊接定位架的内部。
11、本实用新型公开了一种机器人自动焊接以及人防门,其具备的有益效果如下:将分隔钢架推至焊接定位架内部,然后启动伺服液压缸,使得挡块向上移动抵在分隔钢架的末端,然后通过安装电机控制器来启动两组提升电机,使其同步启停,此时带动提升螺柱旋转,使得两组连接块沿着滑槽向上移动,以此使得载板带动焊接定位架向上翻转至水平状态,然后启动顶升液压缸,将焊接定位架向上顶至焊接台的内部,此时完成定位,然后通过启动该移动式焊接机器臂,使其沿着滑轨进行移动的过程中进行连续焊接,避免出现漏焊,同时便于焊接时进行移动和快速定位。
技术特征:
1.一种机器人自动焊接,包括焊接台(1)和设置在焊接台(1)顶部的移动式焊接机器臂(4),其特征在于:所述焊接台(1)的底部设置有一组可翻转的载板(5),所述载板(5)的顶部设置有可上下移动的焊接定位架(2),所述焊接定位架(2)的前端设置有用于定位的挡块(6),所述挡块(6)的底部安装有用于推动挡块(6)上下活动的伺服液压缸(14)。
2.如权利要求1所述的一种机器人自动焊接,其特征在于:所述焊接台(1)的顶部固定安装有滑轨(3),所述移动式焊接机器臂(4)滑动连接在滑轨(3)的外表面。
3.如权利要求1所述的一种机器人自动焊接,其特征在于:所述载板(5)的下表面固定安装有顶升液压缸(11),所述顶升液压缸(11)的输出端贯穿载板(5),且顶升液压缸(11)的输出端与焊接定位架(2)固定连接。
4.如权利要求3所述的一种机器人自动焊接,其特征在于:所述焊接定位架(2)的四角底部均固定连接有定位轴(12),所述定位轴(12)贯穿载板(5)。
5.如权利要求4所述的一种机器人自动焊接,其特征在于:所述焊接定位架(2)的前端底部固定焊接有u形固定架(13),所述伺服液压缸(14)固定安装在u形固定架(13)的顶部,所述u形固定架(13)贯穿载板(5)。
6.如权利要求4所述的一种机器人自动焊接,其特征在于:所述载板(5)的前端固定连接有倾斜滑板(7),所述载板(5)的前端内部设置有支撑轴(15),所述支撑轴(15)滑动连接在焊接台(1)的内底部。
7.如权利要求6所述的一种机器人自动焊接,其特征在于:所述焊接台(1)的底端侧面开设有滑槽(8),所述支撑轴(15)滑动连接在滑槽(8)的内部,所述滑槽(8)的外表面安装有用于提升支撑轴(15)的提升电机(9)。
8.如权利要求7所述的一种机器人自动焊接,其特征在于:所述滑槽(8)的外表面转动连接有提升螺柱(10),所述提升螺柱(10)与提升电机(9)的输出端固定连接,所述支撑轴(15)的两端均转动连接有连接块(16),所述连接块(16)螺纹连接在提升螺柱(10)的外表面。
9.一种人防门,包括权利要求1-8任一项所述的机器人自动焊接,其特征在于:所述人防门包括分隔钢架(17)和人防门门板(18),所述分隔钢架(17)与人防门门板(18)焊接时置于焊接定位架(2)的内部。
技术总结
本技术公开了一种机器人自动焊接以及人防门,包括焊接台和设置在焊接台顶部的移动式焊接机器臂,焊接台的底部设置有一组可翻转的载板,载板的顶部设置有可上下移动的焊接定位架,焊接定位架的前端设置有用于定位的挡块。该机器人自动焊接以及人防门,通过将分隔钢架推至焊接定位架内部,启动伺服液压缸,使得挡块向上移动抵在分隔钢架的末端,启动提升电机,带动提升螺柱旋转,使得载板带动焊接定位架向上翻转至水平状态,然后启动顶升液压缸,将焊接定位架向上顶至焊接台的内部,然后启动移动式焊接机器臂,使其沿着滑轨进行移动的过程中进行连续焊接,避免出现漏焊,同时便于焊接时进行移动和快速定位。
技术研发人员:王冬霞,胡孝永,钱云龙,陈志杰,王丽,林新雅,董炜炜,张增增,温作平,孙迪军
受保护的技术使用者:温州泰昌人防设备有限公司
技术研发日:20230718
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!