一种新型拉铆机的制作方法
本技术涉及拉铆,特别涉及一种新型拉铆机。
背景技术:
1、如果某一产品的螺母需装在外面,而里面空间狭小,无法让压铆机的丫头进入进行压铆且抽芽等方法无法达到强度要求的时候,这时压铆和涨铆都不可行。必须用拉铆。适用于各厚度板材、管材紧固领域。气动或者手动拉铆枪可一次锚固,方便牢固,取代传统的焊接螺母,弥补金属薄板、薄管焊接易熔,焊接螺母不顺等不足。
2、现有的拉铆作业,通常都是采用人工手持拉铆枪进行,存在有工作效率低、生产成本高的问题。
技术实现思路
1、本实用新型的主要目的是提出一种新型拉铆机,旨在解决上述背景技术中提出的问题。
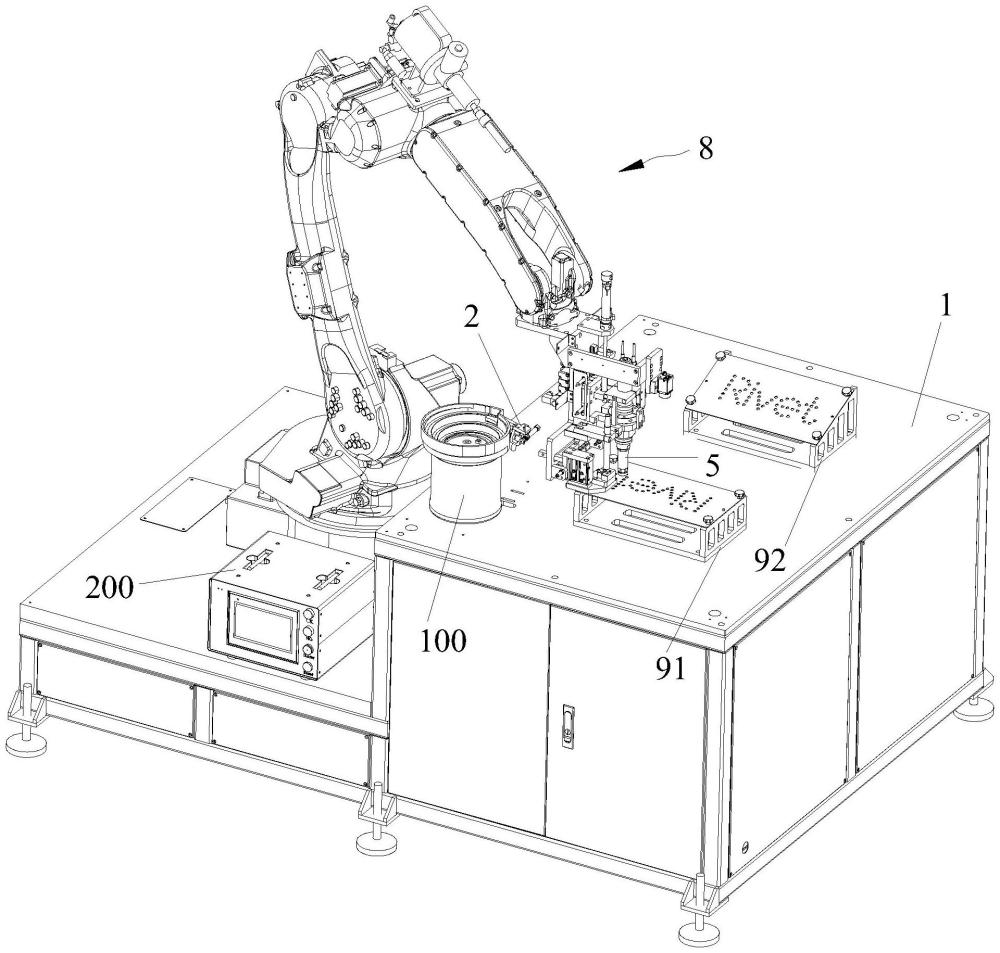
2、为实现上述目的,本实用新型提出一种新型拉铆机,包括架体、上料机构、活动设于所述架体的支架、活动安装于所述支架的取料台、活动安装于所述支架的铆枪、第一驱动机构、第二驱动机构以及多轴机器人;
3、所述架体设有用于固定待拉铆产品的工作台;
4、所述上料机构设于所述架体,用于逐个输送拉铆螺母;
5、所述取料台可通过第一驱动机构的驱动在与上料机构的出料口上下相对和与铆枪上下相对的位置之间运动;
6、所述铆枪可通过第二驱动机构的驱动做垂向往复运动,以靠近取料台取出拉铆螺母和远离取料台;
7、所述多轴机器人用于驱动支架带动铆枪在与待拉铆产品的拉铆位置对齐和远离的位置之间运动,铆枪与所述拉铆位置对齐后,可通过所述第二驱动机构驱动铆枪下行靠近拉铆位置进行拉铆工作或者上升远离拉铆位置。
8、本实用新型技术方案在工作时,先通过人工将待拉铆产品固定在工作台上,通过第一驱动机构驱动取料台运动至与上料机构的出料口上下相对的位置,通过上料机构将拉铆螺母逐个送至取料台后第一驱动机构驱动取料台运动至与铆枪上下相对的位置,由第二驱动机构驱动铆枪下行取出拉铆螺母后,取料台返回等待接收拉铆螺母,之后通过多轴机器人驱动支架带动铆枪运动至与待拉铆产品的拉铆位置对齐,通过所述第二驱动机构驱动铆枪下行靠近拉铆位置进行拉铆工作。与传统的相比,本实用新型结构简单,操作方便,有效提高了拉铆工作效率,降低了生产成本。
技术特征:
1.一种新型拉铆机,其特征在于,包括架体(1)、上料机构、活动设于所述架体(1)的支架(3)、活动安装于所述支架(3)的取料台(4)、活动安装于所述支架(3)的铆枪(5)、第一驱动机构、第二驱动机构以及多轴机器人(8);
2.如权利要求1所述的新型拉铆机,其特征在于:所述第一驱动机构包括固定安装于所述支架(3)的第一滑轨(61)、活动装配于所述第一滑轨(61)的第一滑块(62)以第一伸缩气缸(63),所述取料台(4)与所述第一滑块(62)固定连接,所述第一伸缩气缸(63)固定安装于所述支架(3),第一伸缩气缸(63)的伸缩端与第一滑块(62)固定连接,可通过所述伸缩端的伸缩动作驱动第一滑块(62)带动取料台(4)运动至与上料机构的出料口上下相对的位置,或者运动至与铆枪(5)上下相对的位置。
3.如权利要求1所述的新型拉铆机,其特征在于:所述第二驱动机构包括垂向固定于支架(3)的第二滑轨(71)、活动装配于第二滑轨(71)的第二滑块(72)以及第二伸缩气缸(73),所述铆枪(5)呈垂向状态与所述第二滑块(72)固定连接,所述第二伸缩气缸(73)垂向固定安装于所述支架(3),第二伸缩气缸(73)的伸缩端与第二滑块(72)固定连接,可通过第二伸缩气缸(73)伸缩端的伸缩动作驱动第二滑块(72)带动铆枪(5)做垂向往复运动。
4.如权利要求1所述的新型拉铆机,其特征在于:所述工作台包括第一工作台(91)和第二工作台(92),所述第一工作台(91)的装配面为水平面,用于水平放置并固定待拉铆产品,所述第二工作台(92)的装配面为倾斜面,用于倾斜放置并固定待拉铆产品,可通过螺钉锁定或者卡扣结构固定的方式将待拉铆产品和工作台锁定。
5.如权利要求2所述的新型拉铆机,其特征在于:所述第一滑块(62)垂向固定安装有第三伸缩气缸(64),所述取料台(4)与所述第三伸缩气缸(64)的伸缩端固定连接,以通过第三伸缩气缸(64)伸缩端的伸缩动作调整取料台(4)的高度位置。
6.如权利要求1所述的新型拉铆机,其特征在于:所述上料机构包括振动盘(100)以及吹料机构(2),所述吹料机构(2)设于振动盘(100)的出料端,用于接收多个拉铆螺母并将拉铆螺母逐个吹至所述取料台(4)。
7.如权利要求6所述的新型拉铆机,其特征在于:所述吹料机构(2)包括主体(21),主体(21)设有长条形的料槽(211),主体(21)对应料槽(211)一侧的位置垂向设置有入料管(212);
8.如权利要求7所述的新型拉铆机,其特征在于:所述第三驱动机构为第四伸缩气缸(23),第四伸缩气缸(23)固定安装于所述主体(21),第四伸缩气缸(23)的伸缩端与移动件(22)固定连接,可通过第四伸缩气缸(23)伸缩端的伸缩动作驱动移动件(22)做靠近料槽(211)和远离的运动。
9.如权利要求1至8中任意一项所述的新型拉铆机,其特征在于:还设有控制系统(200),所述控制系统(200)与所述上料机构、第一驱动机构、第二驱动机构以及多轴机器人(8)电性连接,用于驱动上料机构、第一驱动机构、第二驱动机构以及多轴机器人(8)做相对应的动作。
10.如权利要求9所述的新型拉铆机,其特征在于:还设有与所述控制系统(200)电连接的工业相机(300),所述工业相机(300)固定安装于所述支架(3)对应工作台上方的位置,用于拍摄位于工作台的待拉铆产品并输送至控制系统(200),由控制系统(200)根据拍摄到的信息获取拉铆位置后控制铆枪(5)运动至拉铆位置。
技术总结
本技术公开了一种新型拉铆机,其在工作时,先通过人工将待拉铆产品固定在工作台上,通过第一驱动机构驱动取料台运动至与上料机构的出料口上下相对的位置,通过上料机构将拉铆螺母逐个送至取料台后第一驱动机构驱动取料台运动至与铆枪上下相对的位置,由第二驱动机构驱动铆枪下行取出拉铆螺母后,取料台返回等待接收拉铆螺母,之后通过多轴机器人驱动支架带动铆枪运动至与待拉铆产品的拉铆位置对齐,通过所述第二驱动机构驱动铆枪下行靠近拉铆位置进行拉铆工作。与传统的相比,本技术结构简单,操作方便,有效提高了拉铆工作效率,降低了生产成本。
技术研发人员:钱丰,罗永奎,朱治强,黄建文
受保护的技术使用者:睿恩特智能装备(东莞)有限公司
技术研发日:20230721
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!