柔性关节机器人的焊接系统的制作方法
本技术涉及机器人,尤其涉及一种柔性关节机器人的焊接系统。
背景技术:
1、焊接也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。随着制造业的不断发展,利用机器人进行焊接得到了广泛的应用,常用的焊接机器人有六轴垂直串联协作机器人和三轴机器人,六轴垂直串联协作机器人适用于复杂的焊接任务,具有较高的自由度和灵活性,但相对较慢和成本较高,而龙门型或水平关节型三轴机器人适用于简单的焊接任务,具有较快的速度和较低的成本。另外而现有的焊接机器人在实际使用过程中,不便于对焊接机器人上焊枪的角度偏差进行调节,使用不够灵活,不满足现有的需求。
技术实现思路
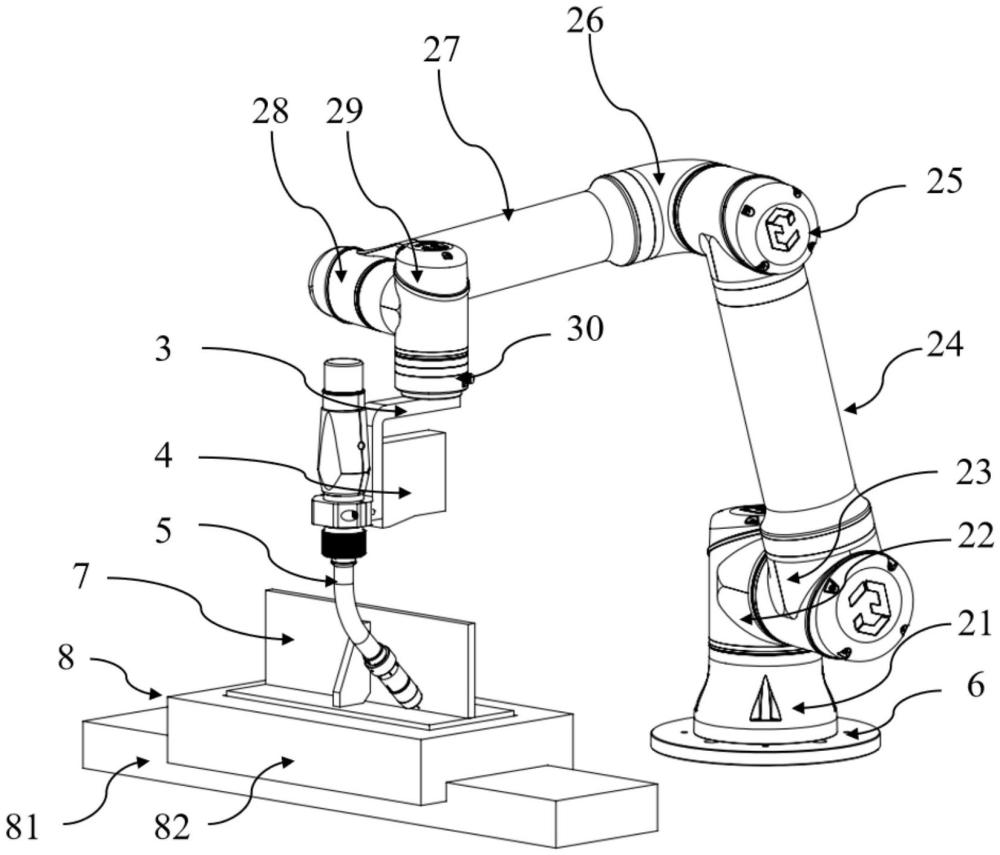
1、为了解决上述问题,本实用新型提供了一种柔性关节机器人的焊接系统,包括柔性关节机器人,所述柔性关节机器人固定设于平台上方,包括依次连接设置的基座、第一旋转关节、第二旋转关节、第一连杆、第三旋转关节、转接头、第二连杆、第四旋转关节、第五旋转关节和工具法兰;所述工具法兰的输出法兰端通过焊枪连接结构一侧固定安装有焊枪,另一侧固定安装有焊缝跟踪传感器,用于实时跟踪纠正焊缝偏差完成焊接工件作业。
2、与现有技术相比较,本实用新型提供的柔性关节机器人的焊接系统不仅解决了三轴机器人只能单向焊接的问题,还克服了六轴机器人末端腕部结构体积、重量和惯量较大的缺点。同时设有的焊缝跟踪传感器可以实时监测焊缝位置和偏差,并将数据反馈给柔性关节机器人,可便及时调整焊接姿态和焊枪位置,从而实现焊缝的准确跟踪和纠正。
技术特征:
1.一种柔性关节机器人的焊接系统,包括柔性关节机器人,其特征在于,所述柔性关节机器人固定设于平台上方,包括依次连接设置的基座、第一旋转关节、第二旋转关节、第一连杆、第三旋转关节、转接头、第二连杆、第四旋转关节、第五旋转关节和工具法兰;所述工具法兰的输出法兰端通过焊枪连接结构一侧固定安装有焊枪,另一侧固定安装有焊缝跟踪传感器,用于实时跟踪纠正焊缝偏差完成焊接工件作业。
2.根据权利要求1所述的焊接系统,其特征在于,所述基座下方设有底部旋转座,通过螺栓与基座固定安装。
3.根据权利要求2所述的焊接系统,其特征在于,所述平台上还设有工件输送装置,用于输送所述焊接工件进行焊接。
4.根据权利要求3所述的焊接系统,其特征在于,所述工件输送装置包括固定滑轨,所述固定滑轨上设有滑动块,所述滑动块与所述焊接工件固定连接。
5.根据权利要求1所述的焊接系统,其特征在于,所述柔性关节机器人还包括驱动电源,所述驱动电源分别为所述的各关节的电机驱动器和电机提供电源。
6.根据权利要求1所述的焊接系统,其特征在于,还包括与平台固定连接的支架,所述支架上固定连接有状态显示屏,用于显示焊接的状态信息和操作界面。
技术总结
本技术公开了一种柔性关节机器人的焊接系统,包括柔性关节机器人,所述柔性关节机器人固定设于平台上方,包括依次连接设置的基座、第一旋转关节、第二旋转关节、第一连杆、第三旋转关节、转接头、第二连杆、第四旋转关节、第五旋转关节和工具法兰;所述工具法兰的输出法兰端通过焊枪连接结构一侧固定安装有焊枪,另一侧固定安装有焊缝跟踪传感器,用于实时跟踪纠正焊缝偏差完成焊接工件作业。
技术研发人员:孙俊杰,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20230731
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!