一种智能制造系统的制作方法
本申请涉及智能制造,尤其是涉及一种智能制造系统。
背景技术:
1、智能制造,源于人工智能的研究,一般认为智能是知识和智力的总和,前者是智能的基础,后者是指获取和运用知识求解的能力,智能制造应当包含智能制造技术和智能制造系统,智能制造系统不仅能够在实践中不断地充实知识库,而且还具有自学习功能,还有搜集与理解环境信息和自身的信息,并进行分析判断和规划自身行为的能力。
2、相关技术中,在工业智能制造生产加工过程中需要对产品进行焊接,传统的工业智能制造系统在对产品进行焊接的过程中,即将产品焊接于板状载体上,可能会出现漏焊的情况发生,进而需要后期通过人工对产品进行补焊,从而降低了生产效率。
技术实现思路
1、为了提高焊接产品的生产效率,本申请提供一种智能制造系统。
2、本申请提供的一种智能制造系统采用如下的技术方案:
3、一种智能制造系统,包括输送组件,所述输送组件用于水平横向输送产品;
4、焊接组件,所述焊接组件水平横向滑移设置于所述输送组件上,所述焊接组件用于加工所述输送组件上的产品;
5、检测组件,所述检测组件位于所述输送组件的后段,所述检测组件用于检测所述焊接结构焊接后的产品。
6、通过采用上述技术方案,输送组件对装载好产品的载板进行水平输送,当输送组件将产品输送到焊接组件的位置时,焊接组件对产品进行焊接,焊接好的产品继续输送到检测组件处,检测组件对产品进行检测,当出现漏焊时,检测组件控制输送组件暂停,并控制焊接组件滑移到漏焊的产品处,从而对产品进行补焊,与人工补焊相比,本申请能够提搞漏焊产品的补焊效率,从而间接提高焊接产品的生产效率。
7、优选的,所述输送组件包括架体、输送辊、输送带以及驱动电机,所述架体架设于地面上,所述输送辊设置有两根并分别转动承载于所述架体的两端,所述输送带环绕套设于两根所述输送辊上,所述驱动电机安装于所述架体上并与其中一根所述输送辊同轴设置。
8、通过采用上述技术方案,启动驱动电机,驱动电机的输出轴转动,进而带动其中一个输送辊转动,使得输送带同步转动,进而驱动装载好产品的载板进行水平输送。
9、优选的,所述输送带的上表面沿水平横向间隔设置有多组定位角钢,每组所述定位角钢的数量均设置有四个,四个所述定位角钢呈矩阵排布。
10、通过采用上述技术方案,四个定位角钢能够对载板的放置进行定位,进而提高载板在输送时以及焊接时的放置稳定性。
11、优选的,所述架体的末端固定有落料板,所述落料板呈倾斜设置。
12、通过采用上述技术方案,落料板能够方便载板和产品快速落料。
13、优选的,所述焊接组件包括支撑架、驱动气缸以及电动焊头,所述架体的侧壁安装有气动滑轨,所述气动滑轨沿水平横向设置,所述支撑架固定于所述气动滑轨的活动座上,所述驱动气缸安装于所述支撑架的顶部,所述驱动气缸的活塞杆竖直朝向所述输送带,所述电动焊头安装于所述驱动气缸的活塞杆端部。
14、通过采用上述技术方案,当产品运动到加工位置时,启动驱动气缸,驱动气缸的活塞杆伸出,进而带动电动焊头下移,电动焊头接近产品加工位置后,启动电动焊头,以对产品进行焊接。
15、优选的,所述检测组件包括承载架、ccd摄像头以及处理器,所述承载架固定于所述架体上,所述ccd摄像头安装于所述承载架上,所述ccd摄像头朝向所述输送带,所述处理器安装于所述架体的一侧,所述ccd摄像头、所述气动滑轨、所述驱动电机、所述驱动气缸、所述电动焊头以及所述处理器之间电连接。
16、通过采用上述技术方案,当输送带将产品输送经过ccd摄像头时,ccd摄像头对产品进行图像拍摄,处理器对图像进行分析,当出现漏焊情况时,处理器分别控制气动滑轨、驱动电机、驱动气缸以及电动焊头运作,以完成补焊。
17、优选的,还包括去废组件,所述去废组件包括气嘴和收集箱,所述气嘴安装于所述架体的一侧,所述收集箱设置于所述架体的另一侧,所述收集箱顶部呈开口设置,所述气嘴水平朝向所述收集箱。
18、通过采用上述技术方案,焊接后产品表面可能会存在部分焊渣,当产品经过气嘴时,气嘴将焊渣吹向收集箱,以对焊渣废料进行收集。
19、优选的,所述收集箱的侧壁固定有弹性卡钩,所述架体的一侧壁设置有卡槽,所述弹性卡钩卡接于所述卡槽内。
20、通过采用上述技术方案,由于收集箱通过卡钩与架体固定,进而较为方便就能拆除收集箱,以对收集箱内的焊渣进行处理。
21、综上所述,本申请包括以下至少一种有益技术效果:
22、1. 当出现漏焊时,检测组件控制输送组件暂停,并控制焊接组件滑移到漏焊的产品处,从而对产品进行补焊,与人工补焊相比,本申请能够提搞漏焊产品的补焊效率,从而间接提高焊接产品的生产效率;
23、2. 焊接后产品表面可能会存在部分焊渣,当产品经过气嘴时,气嘴将焊渣吹向收集箱,以对焊渣废料进行收集。
技术特征:
1.一种智能制造系统,其特征在于,包括:
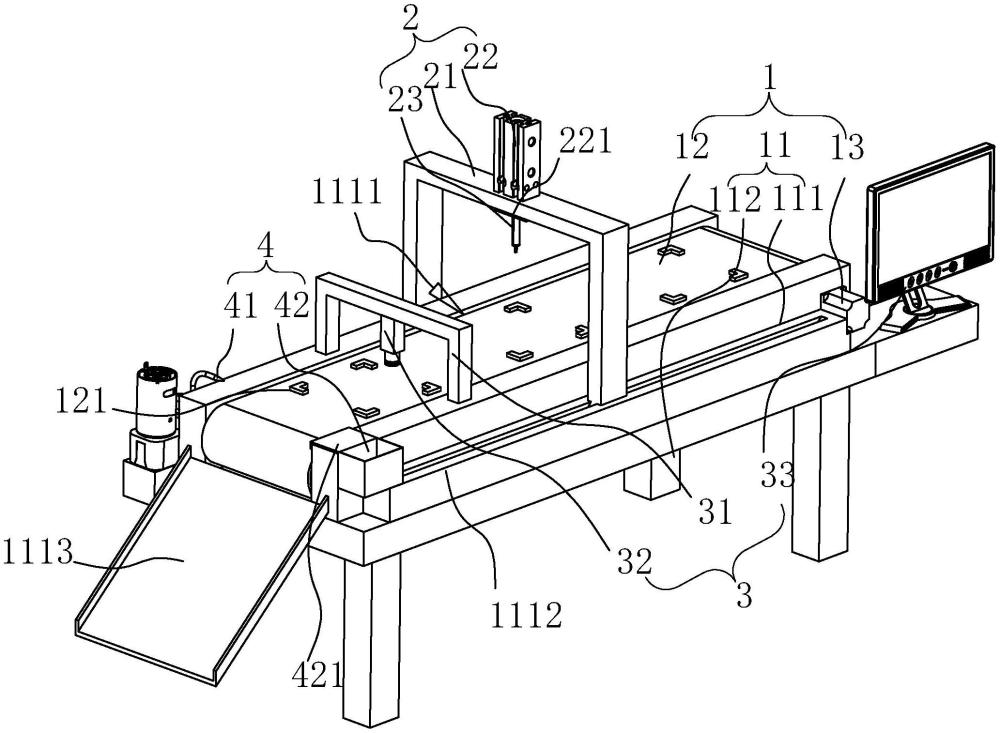
2.根据权利要求1所述的一种智能制造系统,其特征在于,所述输送组件(1)包括架体(11)、输送辊、输送带(12)以及驱动电机(13),所述架体(11)架设于地面上,所述输送辊设置有两根并分别转动承载于所述架体(11)的两端,所述输送带(12)环绕套设于两根所述输送辊上,所述驱动电机(13)安装于所述架体(11)上并与其中一根所述输送辊同轴设置。
3.根据权利要求2所述的一种智能制造系统,其特征在于,所述输送带(12)的上表面沿水平横向间隔设置有多组定位角钢(121),每组所述定位角钢(121)的数量均设置有四个,四个所述定位角钢(121)呈矩阵排布。
4.根据权利要求2所述的一种智能制造系统,其特征在于,所述架体(11)的末端固定有落料板(1113),所述落料板(1113)呈倾斜设置。
5.根据权利要求2所述的一种智能制造系统,其特征在于,所述焊接组件(2)包括支撑架(21)、驱动气缸(22)以及电动焊头(23),所述架体(11)的侧壁安装有气动滑轨(1112),所述气动滑轨(1112)沿水平横向设置,所述支撑架(21)固定于所述气动滑轨(1112)的活动座上,所述驱动气缸(22)安装于所述支撑架(21)的顶部,所述驱动气缸(22)的活塞杆竖直朝向所述输送带(12),所述电动焊头(23)安装于所述驱动气缸(22)的活塞杆端部。
6.根据权利要求5所述的一种智能制造系统,其特征在于,所述检测组件(3)包括承载架(31)、ccd摄像头(32)以及处理器(33),所述承载架(31)固定于所述架体(11)上,所述ccd摄像头(32)安装于所述承载架(31)上,所述ccd摄像头(32)朝向所述输送带(12),所述处理器(33)安装于所述架体(11)的一侧,所述ccd摄像头(32)、所述气动滑轨(1112)、所述驱动电机(13)、所述驱动气缸(22)、所述电动焊头(23)以及所述处理器(33)之间电连接。
7.根据权利要求2所述的一种智能制造系统,其特征在于,还包括去废组件(4),所述去废组件(4)包括气嘴(41)和收集箱(42),所述气嘴(41)安装于所述架体(11)的一侧,所述收集箱(42)设置于所述架体(11)的另一侧,所述收集箱(42)顶部呈开口设置,所述气嘴(41)水平朝向所述收集箱(42)。
8.根据权利要求7所述的一种智能制造系统,其特征在于,所述收集箱(42)的侧壁固定有弹性卡钩(421),所述架体(11)的一侧壁设置有卡槽,所述弹性卡钩(421)卡接于所述卡槽内。
技术总结
本申请涉及智能制造技术领域,尤其是一种智能制造系统,其包括输送组件,所述输送组件用于水平横向输送产品;焊接组件,所述焊接组件水平横向滑移设置于所述输送组件上,所述焊接组件用于加工所述输送组件上的产品;检测组件,所述检测组件位于所述输送组件的后段,所述检测组件用于检测所述焊接结构焊接后的产品;本申请具有提高焊接产品的生产效率的优点。
技术研发人员:童荣华
受保护的技术使用者:广东中特集团股份有限公司
技术研发日:20230804
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!