焊接机器人用平移焊台的制作方法
本技术涉及焊接机器人,具体为焊接机器人用平移焊台。
背景技术:
1、焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接、切割或热喷涂,焊接机器人在使用时需要平移焊台,以便于其实现焊接操作。
2、现有技术中,在焊接比较大的工件时,工件放在焊接机器人下方,固定不动,机器人在空间狭小的位置内焊接,工人或机器人在下方装夹,非常不方便,同时不安全,工人容易撞伤而机器人容易受损,且工件相对比较重时,人工长期劳作强度较大。
技术实现思路
1、本实用新型的目的在于提供焊接机器人用平移焊台,以解决上述背景技术中提出焊接比较大的工件时装夹不方便,不安全的问题。
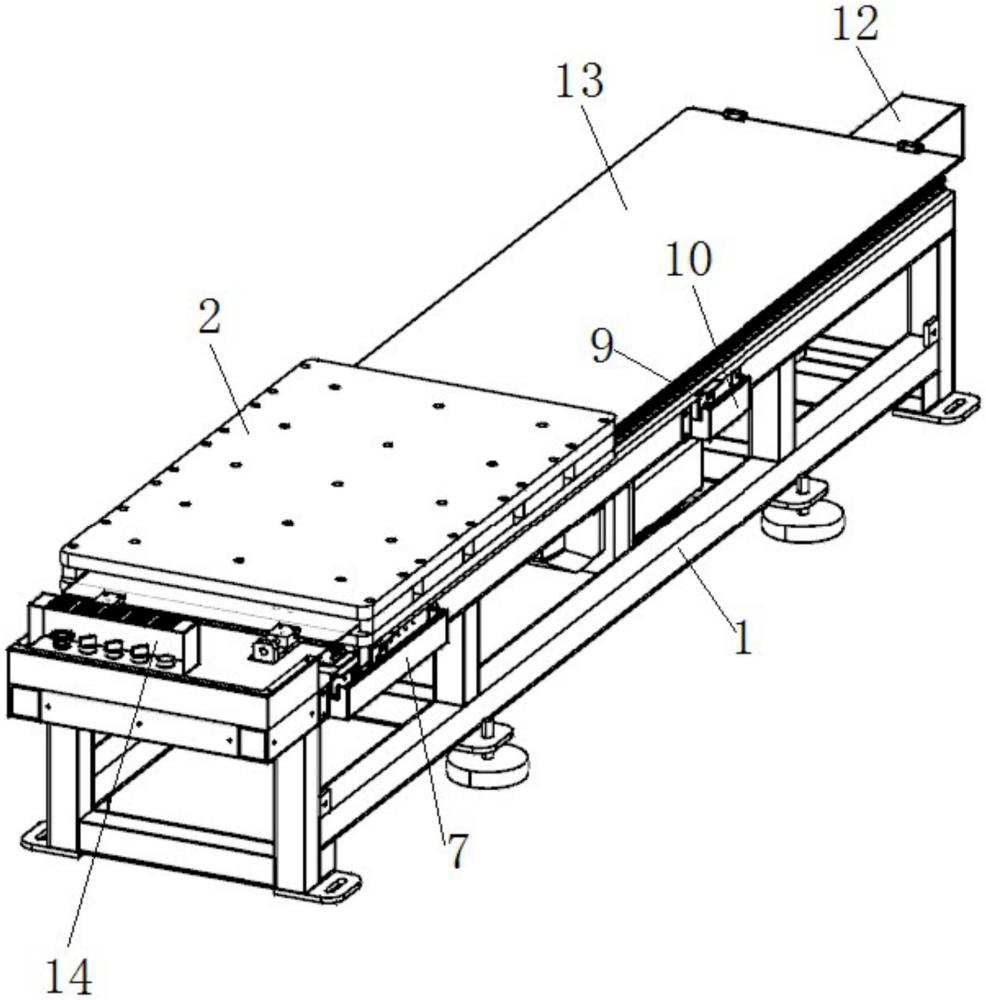
2、为实现上述目的,本实用新型提供如下技术方案:焊接机器人用平移焊台,包括构架,所述构架的表面滑动连接有操作平台,且操作平台的内部贯穿设置有焊渣挡板,该焊渣挡板的两端部通过支撑块架设固定在构架的表面;所述构架的端部固定有按钮键安装盒,该按钮键安装盒的内侧安装有控制按钮;所述构架的底部通过支撑板固定连接有伺服电机,所述操作平台一侧的外壁上固定有感应板,所述构架端部的侧壁上分别安装有第一感应开关、第二感应开关以及第三感应开关,该第一感应开关、第二感应开关以及第三感应开关皆与感应板电性连接。
3、优选的,所述构架靠近齿条护罩一端的底部通过支撑板安装有限位气缸,且限位气缸的输出端固定有限位杆,并且限位状态下限位气缸带动限位杆上升对操作平台的运动进行限位,防止操作平台滑出构架的现象。
4、优选的,所述构架表面的一侧通过螺栓固定有第二开关护罩,且第二开关护罩的内部安装有第四感应开关,并且第四感应开关与感应板相互配合,该第四感应开关与感应板配合对操作平台进行定位。
5、优选的,所述第一感应开关、第二感应开关以及第三感应开关的外侧设置有第一开关护罩,且第一开关护罩通过螺丝固定连接在构架的表面,并且该第一开关护罩用于对第一感应开关、第二感应开关以及第三感应开关的防护工作。
6、优选的,所述操作平台的底部固定连接有齿条,所述伺服电机的输出端贯穿支撑板并通过联轴器安装有齿轮,该齿轮与齿条相互啮合用于带动操作平台沿构架进行往复运动。
7、优选的,所述构架的端部通过螺丝固定有有齿条护罩,该齿条护罩用于对齿条的防护工作。
8、与现有技术相比,本实用新型的有益效果是:该焊接机器人用平移焊台通过将人员和焊接机器人分离,保障人员的安全和设备的安全;方便员工操作,提高了工作效率;可以配合智能环保外罩的安装,隔离焊烟和弧光。
技术特征:
1.焊接机器人用平移焊台,包括构架(1),其特征在于:所述构架(1)的表面滑动连接有操作平台(2),且操作平台(2)的内部贯穿设置有焊渣挡板(13),该焊渣挡板(13)的两端部通过支撑块架设固定在构架(1)的表面;所述构架(1)的端部固定有按钮键安装盒(14),该按钮键安装盒(14)的内侧安装有控制按钮;所述构架(1)的底部通过支撑板固定连接有伺服电机(8),所述操作平台(2)一侧的外壁上固定有感应板(5),所述构架(1)端部的侧壁上分别安装有第一感应开关(3)、第二感应开关(4)以及第三感应开关(6),该第一感应开关(3)、第二感应开关(4)以及第三感应开关(6)皆与感应板(5)相互配合。
2.根据权利要求1所述的焊接机器人用平移焊台,其特征在于:所述构架(1)靠近齿条护罩(12)一端的底部通过支撑板安装有限位气缸(11),且限位气缸(11)的输出端固定有限位杆,并且限位状态下限位气缸(11)带动限位杆上升对操作平台(2)的运动进行限位,防止操作平台(2)滑出构架(1)的现象。
3.根据权利要求1所述的焊接机器人用平移焊台,其特征在于:所述构架(1)表面的一侧通过螺栓固定有第二开关护罩(10),且第二开关护罩(10)的内部安装有第四感应开关(9),并且第四感应开关(9)与感应板(5)电性连接,该第四感应开关(9)与感应板(5)配合对操作平台(2)进行定位。
4.根据权利要求1所述的焊接机器人用平移焊台,其特征在于:所述第一感应开关(3)、第二感应开关(4)以及第三感应开关(6)的外侧设置有第一开关护罩(7),且第一开关护罩(7)通过螺丝固定连接在构架(1)的表面,并且该第一开关护罩(7)用于对第一感应开关(3)、第二感应开关(4)以及第三感应开关(6)的防护工作。
5.根据权利要求1所述的焊接机器人用平移焊台,其特征在于:所述操作平台(2)的底部固定连接有齿条,所述伺服电机(8)的输出端贯穿支撑板并通过联轴器安装有齿轮,该齿轮与齿条相互啮合用于带动操作平台(2)沿构架(1)进行往复运动。
6.根据权利要求1所述的焊接机器人用平移焊台,其特征在于:所述构架(1)的端部通过螺丝固定有有齿条护罩(12),该齿条护罩(12)用于对齿条的防护工作。
技术总结
本技术涉及焊接机器人技术领域,具体为焊接机器人用平移焊台,包括构架,所述构架的表面滑动连接有操作平台,且操作平台的内部贯穿设置有焊渣挡板,所述构架的端部固定有按钮键安装盒,该按钮键安装盒的内侧安装有控制按钮;所述构架的底部通过支撑板固定连接有伺服电机,所述操作平台一侧的外壁上固定有感应板,所述构架端部的侧壁上分别安装有第一感应开关、第二感应开关以及第三感应开关,该第一感应开关、第二感应开关以及第三感应开关皆与感应板电性连接。本技术通过将人员和焊接机器人分离,保障人员的安全和设备的安全;方便员工操作,提高了工作效率;可以配合智能环保外罩的安装,隔离焊烟和弧光。
技术研发人员:李志前,吴安兴,许咏梅
受保护的技术使用者:扬升(福建)自动化科技有限公司
技术研发日:20230816
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!