一种多角度变换的焊枪固定机构的制作方法
本技术属于车身钣金加工,具体涉及一种多角度变换的焊枪固定机构。
背景技术:
1、车身钣金在加工制造过程中,会通过多道工序,焊接是其中较为重要的工序,部分车身焊接时,是通过机器人将待焊接工件夹持住,然后移动到焊枪上进行焊接。现有技术中,在焊接时,由于机器人能转动,因此焊枪通常为固定设置,但是在实际操作过程时,发现本来只需通过调整焊枪的角度就能完成焊接,现在却需要机器人通过大幅度的位置变换来实现焊接,其降低整体工作效率,并且在机器人进行位置变换时,也会占用较大的空间,使得整个焊接需要的空间大。
技术实现思路
1、本实用新型拟提供一种多角度变换的焊枪固定机构,能改变焊枪的水平角度,从而减少机器人带着工件进行位置变换的时间,进而提高效率。
2、为此,本实用新型所采用的技术方案为:一种多角度变换的焊枪固定机构,包括支撑架,所述支撑架的上端设置有用于安装焊枪的旋转组件,且旋转组件能带动焊枪在水平面上转动,所述支撑架的中部通过摆臂组件设置有能对焊枪枪头进行修磨的修磨组件,且摆臂组件能带动修磨组件在水平面上转动;所述旋转组件包括通过电机座设置在支撑架顶部的旋转电机,所述电机座的下端转动设置有连接座,所述旋转电机的输出端向下穿过电机座后设置在连接座上,所述连接座下方设置有用于安装焊枪的安装座。
3、作为上述方案中的优选,所述安装座上设置有用于标识初始状态的标识槽,所述电机座上设置有能指示标识槽的标识支架。
4、进一步优选,所述摆臂组件包括设置在支撑架上的旋转座,所述旋转座内转动设置有旋转轴,所述旋转轴靠近下端的位置处通过旋转块设置有用于安装修磨组件的摆臂,所述旋转轴的下端设置有位于旋转块下端的防脱件,所述旋转轴的中部设置有能带动旋转轴转动的驱动组件;当驱动组件工作时,能带动旋转轴转动,从而实现摆臂的摆动。
5、进一步优选,所述驱动组件包括通过限位组件设置在支撑架上的驱动气缸,所述驱动气缸的输出端设置有连接杆,所述连接杆的另一端铰接在中间摆杆上,所述中间摆杆的另一端套装在旋转轴的中部,所述连接杆的另一端设置为球头;当驱动气缸工作时,能带动中间摆杆绕着旋转轴转动,从而实现旋转轴转动。
6、进一步优选,所述限位组件包括能卡在驱动气缸上的卡环,所述卡环的上下两端均铰接在设置在支撑架上的气缸座上。
7、进一步优选,所述支撑架上设置有用于摆臂组件移动到两个极限位置前进行限位和缓冲的限位缓冲器。
8、进一步优选,所述支撑架上设置有用于检测摆臂组件两个极限位置的检测传感器,所述摆臂组件上对应每个检测传感器均设置有检测片。
9、本实用新型的有益效果:
10、1)焊枪通过旋转组件设置在支撑架上,且旋转组件能带动焊枪进行水平转动,从而实现焊接的多角度变换,与现有技术相比,可通过调节焊枪角度来减少机器人带动工件变换的时间,从而提高焊接效率,并且也能减少机器人移动时占用的空间。
11、2)还通过摆臂组件设置有对焊枪枪头进行修磨的修磨组件,使其能在焊枪未工作时对焊枪进行保养,从而能进一步提高焊接质量。
技术特征:
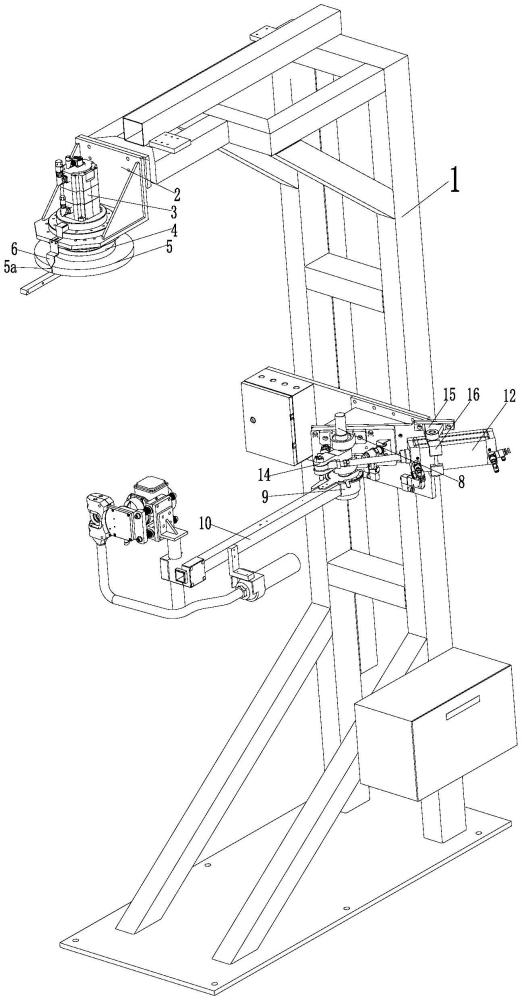
1.一种多角度变换的焊枪固定机构,其特征在于:包括支撑架(1),所述支撑架(1)的上端设置有用于安装焊枪的旋转组件,且旋转组件能带动焊枪在水平面上转动,所述支撑架(1)的中部通过摆臂组件设置有能对焊枪枪头进行修磨的修磨组件,且摆臂组件能带动修磨组件在水平面上转动;所述旋转组件包括通过电机座(2)设置在支撑架(1)顶部的旋转电机(3),所述电机座(2)的下端转动设置有连接座(4),所述旋转电机(3)的输出端向下穿过电机座(2)后设置在连接座(4)上,所述连接座(4)下方设置有用于安装焊枪的安装座(5)。
2.根据权利要求1中所述的多角度变换的焊枪固定机构,其特征在于:所述安装座(5)上设置有用于标识初始状态的标识槽(5a),所述电机座(2)上设置有能指示标识槽的标识支架(6)。
3.根据权利要求1中所述的多角度变换的焊枪固定机构,其特征在于:所述摆臂组件包括设置在支撑架(1)上的旋转座(7),所述旋转座(7)内转动设置有旋转轴(8),所述旋转轴(8)靠近下端的位置处通过旋转块(9)设置有用于安装修磨组件的摆臂(10),所述旋转轴(8)的下端设置有位于旋转块(9)下端的防脱件(11),所述旋转轴(8)的中部设置有能带动旋转轴(8)转动的驱动组件;当驱动组件工作时,能带动旋转轴(8)转动,从而实现摆臂(10)的摆动。
4.根据权利要求3中所述的多角度变换的焊枪固定机构,其特征在于:所述驱动组件包括通过限位组件设置在支撑架(1)上的驱动气缸(12),所述驱动气缸(12)的输出端设置有连接杆(13),所述连接杆(13)的另一端铰接在中间摆杆(14)上,所述中间摆杆(14)的另一端套装在旋转轴(8)的中部,所述连接杆(13)的另一端设置为球头;当驱动气缸(12)工作时,能带动中间摆杆(14)绕着旋转轴(8)转动,从而实现旋转轴(8)转动。
5.根据权利要求4中所述的多角度变换的焊枪固定机构,其特征在于:所述限位组件包括能卡在驱动气缸(12)上的卡环(15),所述卡环(15)的上下两端均铰接在设置在支撑架(1)上的气缸座(16)上。
6.根据权利要求1中所述的多角度变换的焊枪固定机构,其特征在于:所述支撑架(1)上设置有用于摆臂组件移动到两个极限位置前进行限位和缓冲的限位缓冲器(17)。
7.根据权利要求1中所述的多角度变换的焊枪固定机构,其特征在于:所述支撑架(1)上设置有用于检测摆臂组件两个极限位置的检测传感器(18),所述摆臂组件上对应每个检测传感器(18)均设置有检测片(19)。
技术总结
本技术公开了一种多角度变换的焊枪固定机构,包括支撑架,所述支撑架的上端设置有用于安装焊枪的旋转组件,且旋转组件能带动焊枪在水平面上转动,所述支撑架的中部通过摆臂组件设置有能对焊枪枪头进行修磨的修磨组件,且摆臂组件能带动修磨组件在水平面上转动;所述旋转组件包括通过电机座设置在支撑架顶部的旋转电机,电机座的下端转动设置有连接座,所述旋转电机的输出端向下穿过电机座后设置在连接座上,所述连接座下方设置有用于安装焊枪的安装座。焊枪通过旋转组件设置在支撑架上,能实现焊接的多角度变换,与现有技术相比,可通过调节焊枪角度来减少机器人带动工件变换的时间,从而提高焊接效率,并且也能减少机器人移动时占用的空间。
技术研发人员:杨航
受保护的技术使用者:重庆斯睿机器人科技有限公司
技术研发日:20230928
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!