一种机器人自动矫正焊接焊道的方法与流程
本发明涉及焊接机器人,具体为一种机器人自动矫正焊接焊道的方法。
背景技术:
1、机器人焊接是一种使用机器人进行焊接工作的技术。它广泛应用于制造业中,以提高生产效率、降低劳动力成本和改善工作环境。在机器人焊接过程中,机器人通过程序控制和操作,可以完成各种复杂的焊接任务。这些任务包括对接、角焊、缝焊和点焊等。机器人焊接通常使用专用的焊接设备,如弧焊机器人和点焊机器人。弧焊机器人是专门用于弧焊的机器人,它通过使用电弧焊炬来产生电弧热量,将金属熔化并形成焊接接头。点焊机器人是专门用于点焊的机器人,它通过在两个金属板之间施加压力和电流来形成焊接点。机器人焊接的优点包括:提高生产效率、降低劳动力成本、提高焊接质量、减少工人暴露于有害环境的机会、改善工作环境等。
2、对焊缝进行焊接时,其焊接机器人根据预设的移动轨迹对焊缝进行焊接,但焊接过程中的焊缝存在不规则情况,原始的焊接机器人并未针对于不同的焊缝确定其对应的焊接轨迹,导致其焊接的精度无法得到保障。
技术实现思路
1、针对现有技术的不足,本发明提供了一种机器人自动矫正焊接焊道的方法,解决了并未针对于不同的焊缝确定其对应的焊接轨迹,导致其焊接的精度无法得到保障的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种机器人自动矫正焊接焊道的方法,包括:
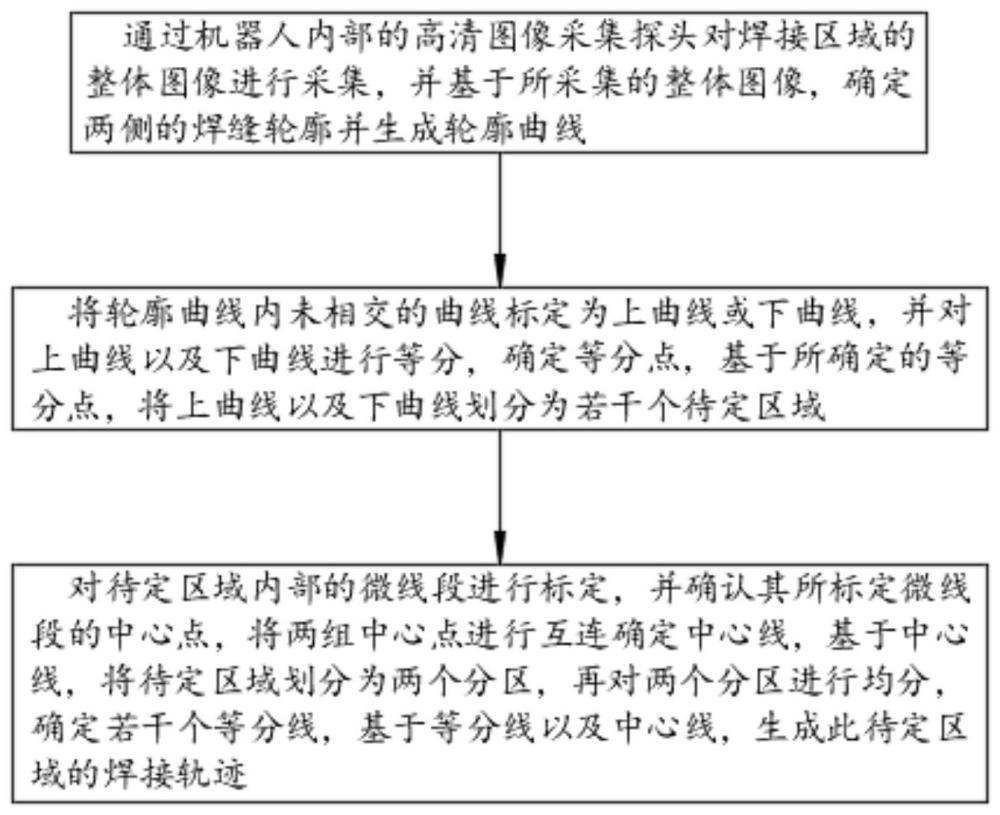
3、基于机器人内部的传动系统,使机器人到达指定焊接区,并通过机器人内部的高清图像采集探头对焊接区域的整体图像进行采集,并基于所采集的整体图像,确定两侧的焊缝轮廓并生成轮廓曲线,包括:
4、将所采集的整体图像进行亮度调节,使此图像的亮度逐渐变化,并记录图像内部的变化区域,将亮度参数变化幅度最小的区域进行标定,锁定焊缝轮廓;
5、基于所确定的焊缝轮廓,进行曲线标定,生成此焊缝轮廓的轮廓曲线;
6、将轮廓曲线内未相交的曲线标定为上曲线或下曲线,并对上曲线以及下曲线进行等分,确定等分点,基于所确定的等分点,将上曲线以及下曲线划分为若干个待定区域,包括:
7、将上曲线进行等分,使其划分为n等份的微线段并确定等分点,其等分点位微线段的两端端点,保障每组微线段的长度属于预设区间内,其中n为预设值,再将下曲线划分为相同等分的微线段并确定等分点;
8、确定上曲线或下曲线位于同一端的端点,依据端点的位置,对曲线内后续所出现的若干个等分点依次确认,并进行数字标记,其数字标记为i,且i=1、2、……、m,i为1时,代表此等分点为端点后续的第一个点位,i为m时,代表为对应曲线的最后端点;
9、将同一端的端点相连,并将带有相同数字标记i的等分点相连,使上曲线以及下曲线划分为若干个等分区域,并标定为待定区域;
10、对待定区域内部的微线段进行标定,并确认其所标定微线段的中心点,将两组中心点进行互连确定中心线,基于中心线,将待定区域划分为两个分区,再对两个分区进行均分,确定若干个等分线,基于等分线以及中心线,生成此待定区域的焊接轨迹,包括:
11、基于待定区域内部中心线所确定的两个分区,对两个分区进行等分,其等分方式与轮廓曲线的等分方式相同,使单个分区划分为三个等分微区,并确定三个相应的等分线,将等分线与中心线的中心点进行互连,确定互连产生后的焊接轨迹路线,且焊接轨迹路线的端点为待定区域两端连线的中点;
12、依次对每个待定区域的焊接轨迹路线进行确定,再将所确定的若干个焊接轨迹路线进行整合,确定属于本焊缝轮廓的焊接轨迹路线。
13、基于所确定的焊接轨迹路线,控制机器人至此焊接轨迹路线的起点,进行焊接控制,并在焊接处理过程中,基于对应待定区域的面积大小,确定焊接速度;包括:
14、将焊接轨迹路线的一端端点标定为路线起点,对机器人进行控制,使其机器人的焊接件与路线起点相结合,并基于此焊接轨迹路线,进行焊接处理;
15、在焊接过程中,确定对应焊接所属对应待定区域的面积参数,并将其标定为mjk,其中k代表不同的待定区域,确定其待定区域的焊接运行速度vk;
16、根据每个待定区域所确定的焊接运行速度vk对焊接机器人进行控制,对焊缝区域进行焊接处理。
17、本发明提供了一种机器人自动矫正焊接焊道的方法。与现有技术相比具备以下有益效果:
18、本发明通过机器视觉,确定其对应的焊缝区域,将焊缝区域划分为若干个待定区域,基于待定区域确定其中心点,再依次确认其待定区域左右分区的对应等分线,依次确定属于不同待定区域的焊接轨迹,基于不同待定区域的焊接轨迹,生成其整个焊缝区域的整个轨迹路径,并控制机器人进行焊接处理,使机器人能达到较好的焊接处理效果,提升焊接过程中的精准度;
19、基于不同待定区域的具体面积,确定不同待定区域的焊接速度,并对焊接机器人进行控制,提升其焊接机器人的焊接效果,缩减焊接时间。
技术特征:
1.一种机器人自动矫正焊接焊道的方法,其特征在于,包括:
2.根据权利要求1所述的一种机器人自动矫正焊接焊道的方法,其特征在于,基于所述整体图像,确定两侧的焊缝轮廓的子步骤包括:
3.根据权利要求1所述的一种机器人自动矫正焊接焊道的方法,其特征在于,基于所确定的等分点,将上曲线以及下曲线划分为若干个待定区域的子步骤包括:
4.根据权利要求1所述的一种机器人自动矫正焊接焊道的方法,其特征在于,基于等分线以及中心线,生成待定区域焊接轨迹的子步骤包括:
5.根据权利要求1所述的一种机器人自动矫正焊接焊道的方法,其特征在于,还包括:
6.根据权利要求5所述的一种机器人自动矫正焊接焊道的方法,其特征在于,基于对应待定区域的面积大小,确定焊接速度的子步骤包括:
7.根据权利要求6所述的一种机器人自动矫正焊接焊道的方法,其特征在于,还包括:
8.根据权利要求6所述的一种机器人自动矫正焊接焊道的方法,其特征在于,其焊接运行速度vk的获取方式如下:
技术总结
本发明公开了一种机器人自动矫正焊接焊道的方法,本发明涉及焊接机器人技术领域,解决了并未针对于不同的焊缝确定其对应的焊接轨迹,导致其焊接的精度无法得到保障的问题,本发明通过机器视觉,确定其对应的焊缝区域,将焊缝区域划分为若干个待定区域,基于待定区域确定其中心点,再依次确认其待定区域左右分区的对应等分线,依次确定属于不同待定区域的焊接轨迹,基于不同待定区域的焊接轨迹,生成其整个焊缝区域的整个轨迹路径,并控制机器人进行焊接处理,使机器人能达到较好的焊接处理效果,提升焊接过程中的精准度。
技术研发人员:吴志文
受保护的技术使用者:马鞍山众翌科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!