机器人搬运冷凝器工位的制作方法
本发明涉及生产设备,尤其涉及机器人搬运冷凝器工位。
背景技术:
1、冷凝器为制冷系统的机件,属于换热器的一种,能把气体或蒸气转变成液体,将管子中的热量,以很快的方式,传到管子附近的空气中,随着社会的发展,冷凝器在生产加工中常配合机器人进行搬运操作。
2、发明人在日常工作中发现,现有技术方案中承载一垛冷凝器的底部的木底托与冷凝器之间的位置距离不固定,不定位木底托,又不能定位冷凝器,因为产品容易损坏,有一侧有杂乱的铜管,不方便定位,因此对于冷凝器的搬运上料没有合适于自动化流程的可靠的方案,需进行改进。
技术实现思路
1、本发明的目的是为了解决现有技术中存在现有技术方案中承载一垛冷凝器的底部的木底托与冷凝器之间的位置距离不固定,不定位木底托,又不能定位冷凝器,因为产品容易损坏,有一侧有杂乱的铜管,不方便定位,因此对于冷凝器的搬运上料没有合适于自动化流程的可靠方案的缺点,而提出的机器人搬运冷凝器工位。
2、为了实现上述目的,本发明采用了如下技术方案:机器人搬运冷凝器工位,包括热交底座和折弯机,所述热交底座位于折弯机的一侧,所述热交底座的上表面安装有机器人本体,所述机器人本体的机械臂上转动连接有冷凝器搬运夹具,机器人夹具的距离检测机构,是一个弹簧杆,杆的上端在机器人本体带动杆下压碰到产品上表面时,上端可以碰到接近,检测高度到达位置,然后夹具就可以对中夹紧,这个机构安装有两个接近检测器,本方案有效实现设备的自动化生产,提高加工效率。
3、优选的,所述折弯的一侧安装有加工平台,所述加工平台位于热交底座的一侧。
4、优选的,所述冷凝器搬运夹具的内部安装有视觉系统,热交底座的一侧设置有光电支架组件,通过光束照射的传感器,和视觉系统配合,可以知道冷凝器的长宽位置,和是否需要机器人旋转180°。
5、优选的,所述冷凝器搬运夹具安装有弹簧杆,夹具带动弹簧杆下压时,可以碰到产品上表面;弹簧杆上端可以碰到接近,检测高度到达位置,然后夹具就可以对中夹紧,这个机构安装有两个接近检测器;人工在显示屏输入薄的产品时,位置在下的接近,要起作用,这样夹具下落距离小,可以抓厚度薄的冷凝器。
6、优选的,所述光电支架组件的数量为四个,有效对物料进行检测。
7、优选的,所述热交底座的一侧放置有两个木底托,便于放置物料。
8、与现有技术相比,本发明的优点和积极效果在于:
9、1、本发明中,机器人夹具的距离检测机构,是一个弹簧杆,杆的上端在机器人本体带动杆下压碰到产品上表面时,上端可以触发接近,检测高度到达位置,然后夹具就可以对中夹紧,这个机构安装有两个接近检测器,本方案有效实现设备的自动化生产,提高加工效率。
10、2、本发明中,人工放完一垛冷凝器产品时输入型号,型号关系到夹具上两个的接近是哪一个起作用,厚的产品型号位置在下的接近,要屏蔽,这样夹具下落距离大,可以抓厚度厚的冷凝器。
11、3、本发明中,人工在显示屏输入薄的产品时,位置在下的接近,要起作用,这样夹具下落距离小,可以抓厚度薄的冷凝器。
12、4、本发明中,通过光束照射的传感器,和视觉系统配合,可以知道冷凝器的长宽位置,和是否需要机器人旋转180°。
技术特征:
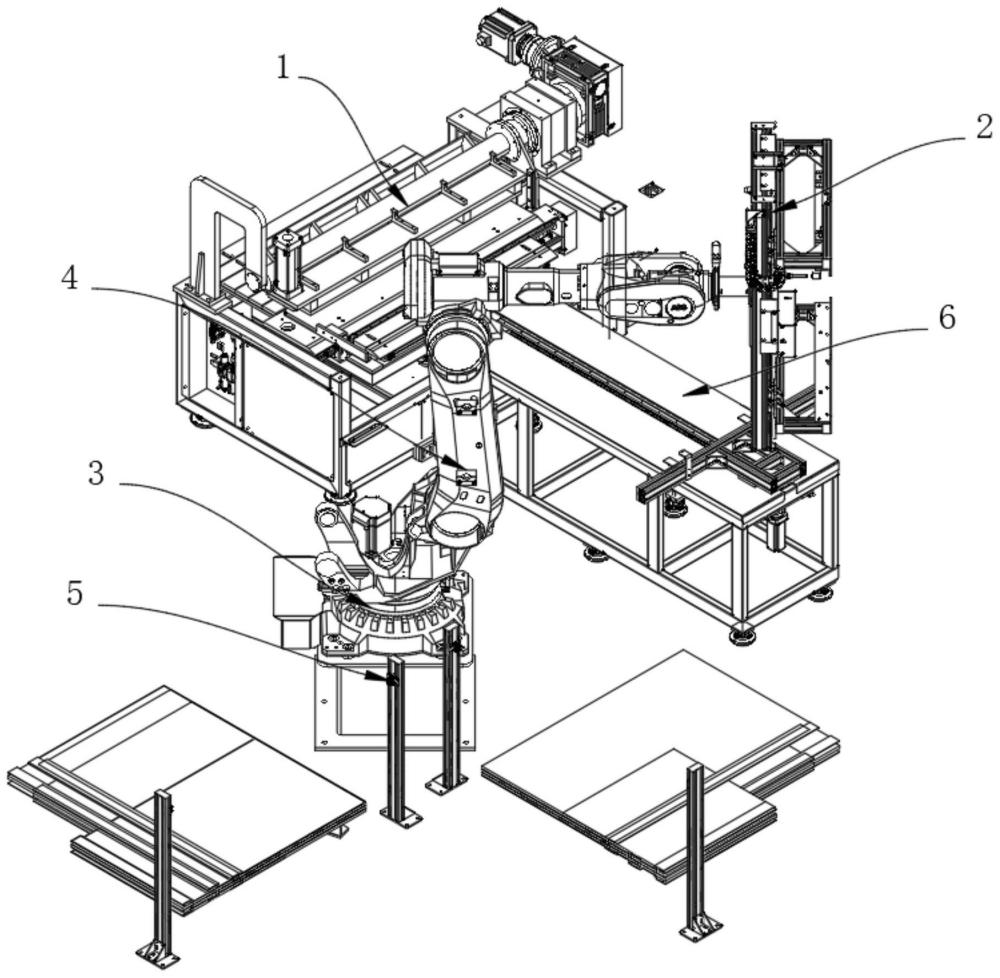
1.机器人搬运冷凝器工位,包括热交底座(3)和折弯机(1),其特征在于:所述热交底座(3)位于折弯机(1)的一侧,所述热交底座(3)的上表面安装有机器人本体(4),所述机器人本体(4)的机械臂上转动连接有冷凝器搬运夹具(2)。
2.根据权利要求1所述的机器人搬运冷凝器工位,其特征在于:所述折弯的一侧安装有加工平台(6),所述加工平台(6)位于热交底座(3)的一侧。
3.根据权利要求1所述的机器人搬运冷凝器工位,其特征在于:所述冷凝器搬运夹具(2)的内部安装有视觉系统(7);所述冷凝器搬运夹具(2)安装有弹簧杆,所述冷凝器搬运夹具(2)带动弹簧杆下压时,可以碰到产品上表面。
4.根据权利要求1所述的机器人搬运冷凝器工位,其特征在于:所述热交底座(3)的一侧设置有光电支架组件(5)。
5.根据权利要求4所述的机器人搬运冷凝器工位,其特征在于:所述光电支架组件(5)的数量为四个。
6.根据权利要求1所述的机器人搬运冷凝器工位,其特征在于:所述热交底座(3)的一侧放置有两个木底托,木底托上面摆放冷凝器。
技术总结
本发明涉及生产设备技术领域,具体为机器人搬运冷凝器工位,包括热交底座和折弯机,所述热交底座位于折弯机的一侧,所述热交底座的上表面安装有机器人本体,所述机器人本体的机械臂上转动连接有冷凝器搬运夹具,所述折弯的一侧安装有加工平台,所述加工平台位于热交底座的一侧,所述冷凝器搬运夹具的内部安装有视觉系统,所述冷凝器搬运夹具安装有弹簧杆,弹簧杆压缩,可以触发,固定安装的两个接近开关。本发明,机器人夹具的距离检测机构,是一个弹簧杆,杆的上端在机器人本体带动杆下压碰到产品上表面时,上端可以触发接近,检测高度到达位置,然后夹具就可以对中夹紧,这个机构安装有两个接近检测器,本方案有效实现设备的自动化生产。
技术研发人员:张晓兰,隋天润,王汝元
受保护的技术使用者:青岛欧开智能系统有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!