一种一体式储罐加工工作站的制作方法
本发明涉及储罐加工,尤其涉及一种一体式储罐加工工作站。
背景技术:
1、玻璃钢储罐的加工主要工序包括,测量、打磨、划线,切割等等,需要一系列复杂且繁重的工序;
2、而现有技术中,完成这些工序的都为人工,但人工操作会无法准确保证测量、打磨、划线的精确度;且切削过程中会产生很多玻璃纤维碎屑,该碎屑肺部无法自主排出,长久吸入会对工人的健康造成影响;另一方面,玻璃钢储罐本身尺寸大且笨重,安装法兰的过程也需要耗费大量的人力物力。
技术实现思路
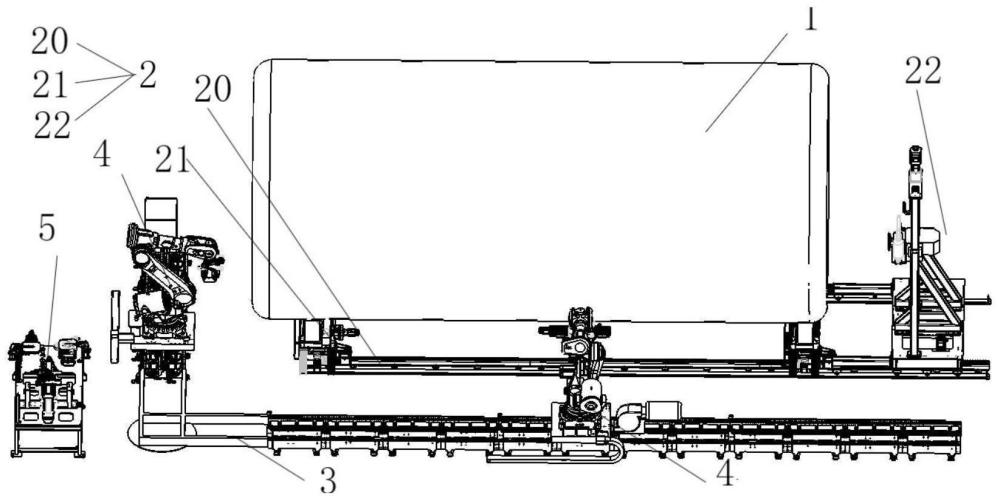
1、本发明的目的是为了解决现有技术中存在的缺点,而提供了一种一体式储罐加工工作站,包括:
2、玻璃钢储罐;
3、储罐安装系统,包括地面轨道,用于驱动玻璃钢储罐转动的驱动组件和用于定位检测玻璃钢储罐转动角度的旋转尾架,所述驱动组件和所述旋转尾架可滑移设于所述地面轨道上,所述玻璃钢储罐架设于所述驱动组件上,所述玻璃钢储罐的侧壁平行于所述地面轨道,所述旋转尾架与所述玻璃钢储罐的端面相接;
4、直角转向地轨,与所述地面轨道位于同一平面,其中,所述直角转向地轨的相互垂直的两条地轨中,其中一条地轨平行于所述玻璃钢储罐的侧壁,另一条地轨平行于所述玻璃钢储罐的端面;
5、机器人组件,可滑移设于所述直角转向地轨上;
6、法兰上料台,包括上料台台体和待替换安装于所述机器人上的器械组件,所述器械组件放置于所述法兰上料台上。
7、进一步地,所述驱动组件包括主动驱动轮组和从动驱动轮组两种驱动轮组,两种驱动轮组中均包含滚轮支架和安装于所述滚轮支架上的两个驱动轮和丝杆,两个所述驱动轮可沿着所述丝杆相向或相离运动以调节夹持住所述玻璃钢储罐。
8、进一步地,所述旋转尾架包括尾架架体,旋转编码器组件和接盘,所述旋转编码器组件与所述尾架架体和上下滑移相接,所述接盘与所述旋转编码器组件中的旋转编码器通过转轴固定相接。
9、进一步地,所述直角转向地轨包括第一地轨,转盘轨道和第二地轨,所述第一地轨垂直于所述第二地轨,所述转盘轨道的两端分别连接所述第一地轨与所述第二地轨。
10、进一步地,所述直角转向地轨中,平行于所述玻璃钢储罐的侧壁的为第一地轨,平行于所述玻璃钢储罐的端面的为第二地轨;
11、所述第二地轨和所述旋转尾架分别位于所述玻璃钢储罐的两个端面外围。
12、进一步地,所述机器人组件包括机器人安装架和机器人本体;所述机器人安装架与所述直角转向地轨可滑动连接,所述机器人本体与所述机器人安装架固定连接,所述机器人本体的端头处设有夹持部,所述夹持部用于夹持所述法兰上料台上的所述器械组件。
13、进一步地,摆放于所述所述法兰上料台台体上的器械组件包括,法兰安装架、模组夹爪、电主轴、测量气缸和加工刀具,所述加工工具包括打磨头、划线笔和铣刀。
14、本发明还提及了如上述任意一项所述的一体式储罐加工工作站的使用方法,包括:
15、步骤s1:根据玻璃钢储罐的数值尺寸,人工将地面轨道上的主动驱动轮组和从动驱动轮组调节至与玻璃钢储罐匹配的相应位置;使用所述旋转尾架中的伺服电机驱动所述旋转尾架到与玻璃钢储罐匹配的相应位置;
16、步骤s2:使用人工吊装所述玻璃钢储罐,将所述玻璃钢储罐安装在所述储罐安装系统中的驱动组件上方,调节所述旋转尾架,使得所述旋转尾架中的接盘与所述玻璃钢储罐相接;
17、步骤s3:将所述测量气缸夹持于所述机器人组件上,所述机器人组件夹持所述测量气缸对所述玻璃钢储罐的空间位置和实体尺寸进行测量,控制两组驱动轮组中的所述驱动轮沿着所述丝杆相向或相离运动,以将所述玻璃钢储罐调节至预设高度;
18、步骤s4:控制所述直角转向地轨上的所述机器人组件夹持所述电主轴,在所述电主轴上依次安装所述打磨头、划线笔和铣刀,对所述玻璃钢储罐进行打磨、划线和切割;
19、步骤s5:在所述电主轴上安装所述模组夹爪,所述模组夹爪抓取所述法兰安装架上的法兰,将所述法兰安装于所述步骤s4切割出的孔洞中。
20、进一步地,所述步骤s4中,所述驱动组件驱动所述玻璃钢储罐转动,利用所述机器人组件上的打磨头、划线笔和铣刀配合转动的所述玻璃钢储罐,以完成打磨、划线和切割的工序。
21、进一步地,所述步骤s4中,所述旋转尾架的接盘与所述玻璃钢储罐的端面相接,所述玻璃钢储罐转动以带动所述接盘转动,所述接盘转动以带动所述旋转编码器转动,所述旋转编码器将转动角度的数据实时传输至控制系统。
22、与现有技术相比,本发明的有益效果是:
23、1、本发明一种一体式储罐加工工作站的转向地轨的设置能有效保证机器人对直径较大玻璃钢储罐的侧壁和端面均能加工;驱动轮组能驱动玻璃钢储罐转动以实现玻璃钢储罐全面的加工,极大减少人力的使用。
24、2、本发明一种一体式储罐加工工作站的两组驱动轮组中的所述驱动轮可沿着所述丝杆相向或相离运动,以调节夹持所述玻璃钢储罐的高度;旋转尾架的接盘与玻璃钢储罐相接,在玻璃钢储罐旋转的过程中实施检测转动角度,以保证一体式储罐加工工作站的加工精确度。
25、3、本发明一种一体式储罐加工工作站的测量、打磨、划线,切割及安装法兰均有机器人组件配合器械组件完成,以保证加工件的精确度。
技术特征:
1.一种一体式储罐加工工作站,其特征在于,包括:
2.根据权利要求1所述的一体式储罐加工工作站,其特征在于:
3.根据权利要求1所述的一体式储罐加工工作站,其特征在于:所述旋转尾架包括尾架架体,旋转编码器组件和接盘,所述旋转编码器组件与所述尾架架体和上下滑移相接,所述接盘与所述旋转编码器组件中的旋转编码器通过转轴固定相接。
4.根据权利要求1所述的一体式储罐加工工作站,其特征在于:所述直角转向地轨包括第一地轨,转盘轨道和第二地轨,所述第一地轨垂直于所述第二地轨,所述转盘轨道的两端分别连接所述第一地轨与所述第二地轨。
5.根据权利要求4所述的一体式储罐加工工作站,其特征在于:所述直角转向地轨中,平行于所述玻璃钢储罐的侧壁的为第一转向地轨,平行于所述玻璃钢储罐的端面的为第二转向地轨;
6.根据权利要求1所述的一体式储罐加工工作站,其特征在于:所述机器人组件包括机器人安装架和机器人本体;所述机器人安装架与所述直角转向地轨可滑动连接,所述机器人本体与所述机器人安装架固定连接,所述机器人本体的端头处设有夹持部,所述夹持部用于夹持所述法兰上料台上的所述器械组件。
7.根据权利要求1所述的一体式储罐加工工作站,其特征在于:摆放于所述所述法兰上料台台体上的器械组件包括,法兰安装架、模组夹爪、电主轴、测量气缸和加工刀具,所述加工工具包括打磨头、划线笔和铣刀。
8.一种基于如权利要求1-7任意一项所述的一体式储罐加工工作站的使用方法,其特征在于:
9.根据权利要求8所述的一体式储罐加工工作站的使用方法,其特征在于:所述步骤s4中,所述驱动组件驱动所述玻璃钢储罐转动,利用所述机器人组件上的打磨头、划线笔和铣刀配合转动的所述玻璃钢储罐,以完成打磨、划线和切割的工序。
10.根据权利要求8所述的一体式储罐加工工作站的使用方法,其特征在于:所述步骤s4中,所述旋转尾架的接盘与所述玻璃钢储罐的端面相接,所述玻璃钢储罐转动以带动所述接盘转动,所述接盘转动以带动所述旋转编码器转动,所述旋转编码器将转动角度的数据实时传输至控制系统。
技术总结
本发明涉及储罐加工技术领域,尤其涉及一种一体式储罐加工工作站,包括:储罐安装系统,包括地面轨道,用于驱动玻璃钢储罐转动的驱动组件和用于定位检测玻璃钢储罐转动角度的旋转尾架;直角转向地轨,与所述地面轨道位于同一平面;法兰上料台,包括上料台台体和待替换安装于所述机器人上的器械组件,所述器械组件放置于所述法兰上料台上。本发明一种一体式储罐加工工作站的转向地轨的设置能有效保证机器人对直径较大玻璃钢储罐的侧壁和端面均能加工;驱动轮组能驱动玻璃钢储罐转动以实现玻璃钢储罐全面的加工,极大减少人力的使用。本发明的测量、打磨、划线,切割及安装法兰均有机器人组件配合器械组件完成,以保证加工件的精确度。
技术研发人员:王昕,沈双宇,陈持华
受保护的技术使用者:上海固顺耐智能科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!