马达的控制装置和方法、马达模块、电动助力转向装置与流程
1.本发明涉及马达的控制装置、马达的控制方法、马达模块以及电动助力转向装置。
背景技术:
2.一般的汽车搭载有电动马达(以下,简称为“马达”)以及具有马达的控制装置的电动助力转向装置(eps)。电动助力转向装置是通过驱动马达来辅助驾驶员的方向盘(或转向盘)操作的装置。以往,通过扭矩控制实现与操舵扭矩对应的马达输出,由此,进行方向盘操作的辅助。
3.专利文献1和2分别公开了与干扰观测器控制相关的技术。在专利文献1中,使用用于降低干扰或控制对象的参数变动对操舵控制造成的影响的鲁棒控制器。在专利文献2中,为了抑制在悬架前后方向共振点激励的共振点干扰,使用由干扰观测器构成的共振点干扰控制器。专利文献3公开了一种消除因操舵机构的内部摩擦而产生的摩擦扭矩而生成与路面反作用力对应的没有不适感的适当的操舵反作用力的技术。
4.专利文献1:日本特开平06-219310号公报
5.专利文献2:国际公开第2016/208665号
6.专利文献3:日本特开2005-88610号公报
7.期望改善在进行驾驶员的方向盘操作的辅助时驾驶员能够感觉到的操舵感。
8.近年来,市场对作为用于评价汽车的舒适性的1个基准的nvh(噪音、振动、散度)的要求越来越严格。但是,现有的扭矩控制尤其容易受到高频干扰的影响,无法抑制高频的扭矩变动,因此,难以应对市场的要求。
9.以往,构建作为马达的角速度ω的函数的摩擦模型,使用构建的模型进行摩擦补偿控制。但是,在通常的摩擦特性中,存在如下课题:在马达的角速度ω为零的附近,摩擦扭矩的符号急剧反转,由此容易引起振荡。
技术实现要素:
10.本发明是为了解决上述的课题中的至少1个而完成的,其目的在于提供通过将模型跟踪控制和/或摩擦补偿控制应用于扭矩控制而能够改善驾驶员能够感觉到的操舵感的马达的控制装置、具有该控制装置的马达模块、具有该马达模块的电动助力转向装置以及马达的控制方法。
11.本发明的控制装置在非限定性且例示的实施方式中,在具有马达的电动助力转向装置中使用,用于控制所述马达,其中,该控制装置具有:扭矩控制器,其根据操舵扭矩进行动作,向作为所述马达的控制对象提供输入;以及模型跟踪控制器,其根据来自所述控制对象的输出而生成校正扭矩,通过所述校正扭矩来校正所述控制对象的输入,所述模型跟踪控制器包含高通滤波器和低通滤波器,该高通滤波器具有第1截止频率,该低通滤波器具有比所述第1截止频率大的第2截止频率,所述模型跟踪控制器构成为:当将所述低通滤波器和所述高通滤波器的传递函数分别设为q(s)和hpf(s)时,在q(s)
·
hpf(s)的增益特性中的
增益为1的频带中,将所述控制对象的传递函数约束在标称模型中。
12.本发明的马达模块在非限定性且例示的实施方式中具有马达和上述的控制装置。
13.本发明的电动助力转向装置在非限定性且例示的实施方式中具有上述的马达模块。
14.本发明的控制方法在非限定性且例示的实施方式中,用于控制具有马达的电动助力转向装置的所述马达,其中,该控制方法包含如下步骤:获取操舵扭矩;根据所述操舵扭矩来决定操作量,并输入给作为所述马达的控制对象;以及使用模型跟踪控制器,根据来自所述控制对象的输出而生成校正扭矩,通过所述校正扭矩来校正所述控制对象的输入,其中,该模型跟踪控制器包含高通滤波器和低通滤波器,该高通滤波器具有第1截止频率,该低通滤波器具有比所述第1截止频率大的第2截止频率,当将所述低通滤波器和所述高通滤波器的传递函数分别设为q(s)和hpf(s)时,在q(s)
·
hpf(s)的增益特性中的增益为1的频带中,该模型跟踪控制器将所述控制对象的传递函数约束在标称模型中。
15.根据本发明的例示性的实施方式,提供通过将模型跟踪控制和/或摩擦补偿控制应用于扭矩控制而能够改善驾驶员能够感觉到的操舵感的马达的控制装置、具有该控制装置的马达模块、具有该马达模块的电动助力转向装置以及马达的控制方法。
附图说明
16.图1是示意性地示出本发明的实施方式的电动助力转向装置的结构例的图。
17.图2是示出本发明的实施方式的控制装置的结构的典型例的框图。
18.图3是例示出用于进行本发明的实施方式的马达的控制的处理器的功能的功能框图。
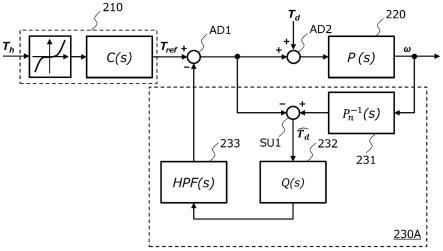
19.图4是示出第1安装例中的模型跟踪控制器的结构例的功能框图。
20.图5是例示出q(s)
·
hpf(s)的增益特性t(s)以及设备(plant)与标称模型pn(s)的模型化误差δ(s)的倒数的增益特性的曲线图。
21.图6是例示出扭矩控制器中的相位补偿器的传递函数c(s)的增益线图的曲线图。
22.图7是例示出高通滤波器的传递函数hpf(s)的增益线图的曲线图。
23.图8是例示出标称模型pn(s)的增益线图的曲线图。
24.图9是示出不应用模型跟踪控制的情况下的操舵角和扭转扭矩的测定结果的曲线图。
25.图10是示出应用了模型跟踪控制的情况下的操舵角和扭转扭矩的测定结果的曲线图。
26.图11是示出不应用模型跟踪控制的情况以及应用了模型跟踪控制的情况各自的操舵角的时间变化的测定结果的曲线图。
27.图12是示出第2安装例中的模型跟踪控制器的结构例的功能框图。
28.图13是示出不应用摩擦补偿控制的情况以及应用了摩擦补偿控制的情况下的操舵角和操舵扭矩的模拟结果的曲线图。
29.图14是示出应用了现有的摩擦补偿控制的情况以及应用了第2安装例的摩擦补偿控制的情况下的操舵角和操舵扭矩的模拟结果的曲线图。
30.标号说明
31.100:控制装置(ecu);200:处理器;210:扭矩控制器;211:响应性相位补偿部;212:相位补偿器;220:控制对象;230、230a、230b:模型跟踪控制器;231:控制对象逆模型;232:低通滤波器;233:高通滤波器;250:摩擦补偿计算器;251:减法器;252:限幅器;253:增益调整器;1000:电动助力转向装置;ad1:减法器;ad2、ad3:加法器;su1:减法器。
具体实施方式
32.以下,参照附图对搭载于本发明的电动助力转向装置的马达的控制装置、马达的控制方法、具有该控制装置的马达模块以及具有该马达模块的电动助力转向装置的实施方式进行详细地说明。但是,有时省略超出所需的详细说明。例如,有时省略已经众所周知的事项的详细说明、对实质上相同的结构的重复说明。这是为了避免以下的说明变得不必要地冗长,使本领域技术人员容易理解。
33.以下的实施方式是例示,搭载于本发明的电动助力转向装置的马达的控制装置、马达的控制方法不限于以下的实施方式。例如,以下的实施方式所示的数值、步骤、该步骤的顺序等只不过是一个例子,只要在技术上不产生矛盾,能够进行各种改变。以下所说明的实施方式或者实施例只不过是例示,只要在技术上不产生矛盾,能够进行各种组合。
34.【1.电动助力转向装置1000的结构】
35.在图1中,示意性地示出了本发明的实施方式的电动助力转向装置1000的结构例。
36.电动助力转向装置1000(以下记为“eps”)具有转向系统520以及生成辅助扭矩的辅助扭矩机构540。eps 1000生成对通过驾驶员操作方向盘而产生的转向系统的操舵扭矩进行辅助的辅助扭矩。通过辅助扭矩,减轻驾驶员的操作的负担。
37.转向系统520例如具有方向盘521、转向轴522、万向联轴器523a、523b、旋转轴524、齿条和齿轮机构525、齿条轴526、左右的球窝接头552a、552b、横拉杆527a、527b、转向节528a、528b以及左右的操舵车轮529a、529b。
38.辅助扭矩机构540例如具有操舵扭矩传感器541、操舵角传感器542、汽车用电子控制单元(ecu)100、马达543、减速齿轮544、逆变器545以及扭杆546。操舵扭矩传感器541通过检测扭杆546的扭转量来检测转向系统520中的操舵扭矩。操舵角传感器542检测方向盘的操舵角。另外,操舵扭矩也可以不是操舵扭矩传感器的值,而是通过运算导出的推断值。操舵角也能够根据角度传感器的输出值来运算。
39.ecu 100根据由操舵扭矩传感器541、操舵角传感器542、搭载于车辆的车速传感器(未图示)等检测出的检测信号而生成马达驱动信号,并输出给逆变器545。例如,逆变器545根据马达驱动信号将直流电力转换为作为u相、v相以及w相的伪正弦波的三相交流电力,并提供给马达543。马达543例如是表面磁铁型同步马达(spmsm)或者开关磁阻马达(srm),接受三相交流电力的供给而生成与操舵扭矩对应的辅助扭矩。马达543经由减速齿轮544向转向系统520传递生成的辅助扭矩。以下,将ecu 100记载为eps的控制装置100。
40.控制装置100与马达被模块化,作为马达模块而被制造以及销售。马达模块具有马达和控制装置100,适合用于eps。或者,控制装置100能够与马达独立地作为用于控制eps的控制装置而制造以及销售。
41.【2.控制装置100的结构例】
42.在图2中示出了本发明的实施方式的控制装置100的结构的典型例。控制装置100
例如具有电源电路111、角度传感器112、输入电路113、通信i/f 114、驱动电路115、rom 116以及处理器200。控制装置100能够作为安装了这些电子部件的印刷布线基板(pcb)来实现。控制装置100用于控制具有马达的电动助力转向装置的马达。
43.搭载于车辆的车速传感器300、操舵扭矩传感器541以及操舵角传感器542以能够通信的方式与处理器200连接,从车速传感器300、操舵扭矩传感器541以及操舵角传感器542向处理器200分别发送车速、操舵扭矩以及操舵角。
44.控制装置100与逆变器545(参照图1)电连接。控制装置100控制逆变器545所具有的多个开关元件(例如mosfet)的开关动作。具体而言,控制装置100生成对各开关元件的开关动作进行控制的控制信号(以下,表述为“栅极控制信号”)并输出给逆变器545。
45.控制装置100根据操舵扭矩等而生成扭矩指令值,例如通过矢量控制来控制马达543的扭矩和旋转速度。控制装置100不限于进行矢量控制,也能够进行其他闭环控制。旋转速度由在单位时间(例如1分钟)内转子旋转的转速(rpm)或在单位时间(例如1秒钟)内转子旋转的转速(rps)表示。矢量控制是将在马达中流动的电流分解为有助于扭矩的产生的电流成分和有助于磁通的产生的电流成分,独立地控制相互垂直的各电流成分的方法。
46.电源电路111与外部电源(未图示)连接,生成电路内的各块所需的dc电压。所生成的dc电压例如为3v或5v。
47.角度传感器112例如是旋转变压器或霍尔ic。或者,角度传感器112也通过具有磁阻(mr)元件的mr传感器与传感器磁铁的组合来实现。角度传感器112检测转子的旋转角并将该旋转角输出给处理器200。控制装置100可以具有检测马达的旋转速度、加速度的速度传感器、加速度传感器来代替角度传感器112。处理器200能够根据马达的电角度θm来运算角速度ω[rad/s]。
[0048]
输入电路113接受由电流传感器(未图示)检测出的马达电流值(以下,表述为“实际电流值”),根据需要将实际电流值的电平转换为处理器200的输入电平,并将实际电流值输出给处理器200。输入电路113的典型例是模拟数字转换电路。
[0049]
处理器200是半导体集成电路,也被称为中央运算处理装置(cpu)或微处理器。处理器200依次执行保存在rom 116中的记述了用于控制马达驱动的指令组的计算机程序,实现期望的处理。控制装置100除了处理器200之外或者代替处理器200而可以具有搭载有cpu的fpga(field programmable gate array:现场可编程门阵列)、gpu(graphics processing unit:图形处理单元)、asic(application specific integrated circuit:专用集成电路)、assp(application specific standard product:专用标准产品)、或者从这些电路中选择的2个以上的电路的组合。处理器200根据实际电流值和转子的旋转角等来设定电流指令值,生成pwm(pulse width modulation:脉冲宽度调制)信号,并输出给驱动电路115。
[0050]
通信i/f 114例如是用于依据车载的控制区域网络(can)进行数据的收发的输入输出接口。
[0051]
驱动电路115典型地是栅极驱动器(或预驱动器)。驱动电路115根据pwm信号而生成栅极控制信号,并向逆变器545所具有的多个开关元件的栅极提供栅极控制信号。在驱动对象是能够以低电压进行驱动的马达时,有时未必需要栅极驱动器。在该情况下,栅极驱动器的功能能够安装在处理器200中。
[0052]
rom 116与处理器200电连接。rom 116例如是可写入的存储器(例如prom)、可改写的存储器(例如闪存、eeprom)或读出专用的存储器。rom 116保存有包含用于使处理器200控制马达驱动的指令组的控制程序。例如,控制程序在引导时暂时展开到ram(未图示)。
[0053]
在图3中示出了用于进行本发明的实施方式的马达的控制的处理器200的功能块。在图示的安装例中,作为计算机的处理器200使用扭矩控制器、模型跟踪控制器、减法器以及加法器依次执行马达的控制所需的处理(或者任务)。
[0054]
各功能块作为软件(或固件)和/或硬件而安装在处理器200中。各功能块的处理典型地以软件的模块为单位记述在计算机程序中,并保存在rom 116中。但是,在使用fpga等的情况下,这些功能块的全部或一部分可以作为硬件加速器来安装。另外,本发明的实施方式的马达的控制方法能够通过安装在计算机中并使计算机执行期望的动作来实施。
[0055]
控制装置100具有扭矩控制器210、模型跟踪控制器230、减法器ad1以及加法器ad2。换言之,在处理器200中安装有与扭矩控制器210、模型跟踪控制器230、减法器ad1以及加法器ad2分别对应的功能。
[0056]
扭矩控制器210根据操舵扭矩th进行动作,向作为马达的控制对象220提供输入。例如,由操舵扭矩传感器541检测出的操舵扭矩th被输入给扭矩控制器210。扭矩控制器210在操舵频率或者操舵速度处于规定的范围内时,通过对操舵扭矩th应用相位补偿而生成目标马达扭矩(或者扭矩指令值)t
ref
,并输入给控制对象220。
[0057]
图3所例示的扭矩控制器210具有基础辅助运算部211和相位补偿器212。
[0058]
基础辅助运算部211获取操舵扭矩th和车速。基础辅助运算部211根据操舵扭矩th和车速而生成基础辅助扭矩。例如,基础辅助运算部211可以具有规定了操舵扭矩th和车速与基础辅助扭矩的对应的查找表(lut)。基础辅助运算部211能够参照lut,根据操舵扭矩th和车速来决定处于对应关系的基础辅助扭矩。并且,基础辅助运算部211能够根据由基础辅助扭矩的变化量与操舵扭矩th的变动量的比率规定的斜率来决定基础辅助增益。
[0059]
本发明的实施方式中的相位补偿器212在驾驶员操作方向盘时在操舵频率可取的范围内调整辅助增益,补偿扭杆的刚性。在本发明的实施方式中,上述规定的范围的例子为5hz以下。相位补偿器212也可以在操舵频率为5hz以下时对操舵扭矩(扭转扭矩)应用例如1次相位补偿。1次相位补偿例如由数学式1的数学式的传递函数表示。
[0060]
【数学式1】
[0061][0062]
这里,s是拉普拉斯变换算子,f1是传递函数的零点的频率(hz),f2是传递函数的极点的频率(hz)。将以增益(或环路增益)为纵轴、以频率的对数为横轴的曲线图称为增益线图。在增益线图中,零点是指增益曲线与表示0db的横轴的交点,极点是指增益曲线的极大点。例如,通过使极点的频率大于零点,能够应用相位超前补偿。该频率的间隔越大,相位超前量越多。
[0063]
相位补偿器212根据从基础辅助运算部211输出的基础辅助扭矩和基础辅助增益而生成目标马达扭矩t
ref
。例如,相位补偿器212是稳定化补偿器,能够对基础辅助扭矩应用稳定性相位补偿。相位补偿器212可以具有频率特性可以根据基础辅助增益而改变的2次以
上的传递函数。2次以上的传递函数使用响应性的参数ω和阻尼的参数ζ来表示。2次以上的传递函数例如能够通过数学式2的数学式来表示。通过将传递函数的次数设为2次,能够对传递函数的特性赋予阻尼。通过改变阻尼,能够调整相位特性。
[0064]
【数学式2】
[0065][0066]
这里,s是拉普拉斯变换算子,ω1是零点的频率,ω2是极点的频率,ζ1是零点的阻尼,ζ2是极点的阻尼。极点的频率ω2小于零点的频率ω1。
[0067]
模型跟踪控制器230构成为根据作为来自控制对象220的输出的马达的角速度ω(mr角速度)来推断干扰扭矩,计算推断干扰扭矩并反馈给控制对象220的输入。从模型跟踪控制器230反馈给控制对象220的输入的扭矩相当于对控制对象220的输入进行校正的“校正扭矩”。模型跟踪控制器230根据控制对象220的输出而生成该校正扭矩。模型跟踪控制器230的例子是构成为进行模型跟踪控制的模型跟踪控制器。关于模型跟踪控制器230的具体的结构,在后面详细地进行说明。
[0068]
减法器ad1从目标马达扭矩t
ref
减去从模型跟踪控制器230输出的推断干扰扭矩。来自减法器ad1的输出被输入给加法器ad2和模型跟踪控制器230。加法器ad2对来自减法器ad1的输出加上干扰扭矩td并输出给控制对象220。这里,本发明的实施方式中的干扰的例子是由马达、减速齿轮等机械引起的摩擦、扭矩波动或晃动、自回正扭矩、或者在未铺设的摇晃道或砂砾道等上行驶时可能产生的干扰。这里,自回正扭矩是指在切断方向盘时通过扭转的轮胎的弹性而在使方向盘返回的方向上作用的扭矩。
[0069]
【第1安装例】
[0070]
模型跟踪控制器具有逆设备模型、高通滤波器以及低通滤波器(或者q滤波器)。模型跟踪控制器构成为:在将低通滤波器和高通滤波器的传递函数分别设为q(s)和hpf(s)时,在q(s)
·
hpf(s)的增益特性中的增益为1的频带中,将控制对象的传递函数p(s)约束在标称模型pn(s)中。另外,在本说明书中,“将控制对象的传递函数约束在标称模型中”是指例如在观察输入输出关系时,控制对象被控制为控制对象的传递函数在外观上看起来是标称模型的传递函数。
[0071]
在图4中示出了第1安装例中的模型跟踪控制器230a的结构例。模型跟踪控制器230a具有控制对象逆模型231、低通滤波器232、高通滤波器233以及减法器su1。高通滤波器233具有第1截止频率,低通滤波器232具有第2截止频率。
[0072]
向控制对象逆模型231输入马达的角速度ω。减法器su1从控制对象逆模型231的输出中减去减法器ad1的输出而生成推断干扰扭矩^td。推断干扰扭矩^td依次接受由串联耦合的低通滤波器232和高通滤波器233进行的滤波处理,并输入给减法器ad1。这样,模型跟踪控制器230a将推断干扰扭矩^td反馈给控制对象220的输入。另外,“^t
d”是指图4和图12所示的带帽檐的td。
[0073]
模型跟踪控制器230a执行表示将作为控制对象220的马达的角速度ω用于电流控制的外环的反馈环路的模型跟踪控制。在第1安装例中,通过模型跟踪控制器230a所形成的反馈环路,能够进行取决于角速度ω的扭矩波动的补偿。能够按照马达的类别对用于控制的角速度ω的信号进行校正,与电流信号等相比,能够提高角速度ω的信号的精度。其结果
为,能够将精度较高的扭矩波动的补偿应用于扭矩控制。
[0074]
模型跟踪控制器230a与现有的干扰推断器(或干扰观测器)结构上类似,但目标作用、效果不同。现有的干扰推断器通过将逆设备模型选定为接近设备模型的值而推断干扰扭矩,通过预先加减干扰扭矩来降低干扰的影响。作为该补偿对象的频带是车辆行为中能够获取的4hz以下的较低的频率。
[0075]
本发明的实施方式的模型跟踪控制利用通过反馈环路将设备约束在由逆设备模型定义的标称模型中的效果。能够成为补偿对象的频带为4hz至150hz左右,与现有的干扰推断器的频带不同。例如,若以没有扭矩波动的方式定义逆设备模型,则通过模型跟踪控制,设备模型被约束为没有扭矩波动的特性,其结果为,通过应用扭矩波动的补偿,能够降低扭矩波动。除此之外,也能够构建惯性或粘性的模型,通过在该模型中约束设备模型来实现设备模型的低惯性化或低粘性化。通过执行模型跟踪控制,除了进行马达的扭矩波动的补偿之外,还例如进行损失扭矩补偿或马达惯性补偿。
[0076]
在本说明书中,将控制对象220、用于约束控制对象220的标称模型(或者设备模型)、由该设备模型的逆设备模型定义的控制对象逆模型231、低通滤波器232的传递函数以及高通滤波器233的传递函数分别记载为p(s)、pn(s)、p
n-1
(s)、q(s)以及hpf(s)。
[0077]
设备模型(标称模型)由数学式3的数学式表示,逆设备模型由数学式4的数学式表示。通过适当地设定j
mn
和b
mn
,能够对控制对象220的p(s)赋予期望的频率特性。在本实施方式中,设备模型(标称模型)是1惯性系统的模型。
[0078]
【数学式3】
[0079][0080]
【数学式4】
[0081][0082]
将由模型跟踪控制器构成的内环的互补灵敏度函数设为t(s),将设备模型的模型化误差设为δ(s)。t(s)由q(s)hpf(s)表示,关于δ(s),数学式5所示的关系成立。模型跟踪控制器的鲁棒稳定性在t(s)与δ(s)之间由数学式6的数学式表示的小增益定理成立时被保证。为了抑制干扰,只要t(s)=1即可,但若考虑鲁棒稳定性,则需要满足数学式6的数学式。由此可以理解为,无法兼顾干扰抑制和鲁棒稳定性。
[0083]
【数学式5】
[0084][0085]
【数学式6】
[0086]
或者|t(jω)δ(jω)|<1,
[0087]
在图5中例示了整个转向系统的传递函数的增益线图。增益线图中的横轴表示频率[hz],纵轴表示增益[db]。在第1安装例中,为了通过频带实现干扰抑制,将频带划分为t(s)=1的需要干扰抑制的区域i和为了确保鲁棒稳定性而使t(s)下降的区域ii。在区域ii中,1/δ(s)>t(s)成立。
[0088]
整个转向系统的传递函数的增益特性例如在20hz附近和50hz附近具有峰值,模型化误差出现在2个峰值中的50hz附近的峰值。即,δ(s)在50hz附近具有峰值,图5所示的1/δ(s)在50hz附近具有底部。作为增益特性的调整方法,有1/δ(s)的调整和t(s)的折点的调整。1/δ(s)的调整通过调整设备模型的j
mn
和b
mn
来进行,t(s)的折点的调整通过调整低通滤波器232的第2截止频率来进行。并且,能够通过操舵的辅助量、操舵速度或者车速来调整对干扰的灵敏度。在模型化误差的底部的频率接近区域i与区域ii的边界的频率的情况下,作为应对,经常采用提高低通滤波器232的次数而使需要抑制干扰的区域i中的t(s)急剧下降的方法。
[0089]
控制装置100对低频的扭矩信号进行扭矩控制,并且对高频的干扰进行角速度ω≈0的控制,由此以使方向盘不会转动的方式实现操舵的稳定化。为了达成该目的,控制装置100执行如下内容:使用扭矩控制器210来降低扭矩控制的高频增益以及使用模型跟踪控制器230a将控制对象p(s)约束为高频增益下降的特性。进行后者的处理的原因是为了在图4所示的td那样的干扰被输入到控制对象220时控制对象220不会对该干扰作出反应。
[0090]
在图6中例示了扭矩控制器210中的相位补偿器212的传递函数c(s)的增益线图。在图7中例示了高通滤波器233的传递函数hpf(s)的增益线图。在图8中例示了标称模型pn(s)的增益线图。增益线图中的横轴表示频率[hz],纵轴表示增益[db]。例如,如果应用具有图6所示的传递函数c(s)的增益特性的相位补偿器212,则如图8所示那样,能够在标称模型pn(s)的增益特性中降低高频增益。传递函数c(s)的增益线图中的截止频率fc例如为2hz以上且10hz以下,pn(s)的增益线图中的截止频率fc例如为2hz以上且20hz以下。
[0091]
模型跟踪控制器230a构成为:在q(s)
·
hpf(s)的增益特性中的增益为1的频带中,将控制对象220的传递函数p(s)约束在标称模型pn(s)中。逆设备模型p
n-1
(s)被设计为赋予想要约束的逆特性,发挥q(s)
·
hpf(s)的增益特性。通过适当地设计设备模型的j
mn
和b
mn
,如图8所示那样,能够得到在高频区域中增益下降的标称模型pn(s)的增益特性。区域i与区域ii的边界的频率(规定了区域i的频率范围的下限值)是能够由驾驶员输入的最大频率,通常为2hz至10hz左右。该频率取决于高通滤波器233的第1截止频率。因此,模型跟踪控制的有效范围的下限频率通过调整高通滤波器233的第1截止频率来决定,以避免阻碍扭矩控制。
[0092]
低通滤波器232和高通滤波器233串联耦合。低通滤波器232可以由多级的lpf构成。即,q(s)可以表示为n级lpf(n为1以上)的传递函数。第2截止频率比第1截止频率大。第1截止频率例如为2hz以上且10hz以下,例如优选为5hz以上且7hz以下。第2截止频率例如为3hz以上,优选为50hz以下。但是,第2截止频率的上限可以设定为140hz至200hz左右。图8所示的标称模型pn(s)的增益特性的截止频率fc取决于第1截止频率和第2截止频率,例如为2hz以上且20hz以下。
[0093]
本发明人等通过进行实车测定来确认应用本发明的实施方式的模型跟踪控制而得到的效果。在实车测定中,对通过将模型跟踪控制应用于扭矩控制而降低扭矩波动和方向盘的转动的效果进行了测定。这里,所谓方向盘的转动是指在放手的状态下越过台阶时方向盘左右摆动。
[0094]
在图9中示出了不应用模型跟踪控制的情况下的操舵角和扭转扭矩的测定结果。在图10中示出了应用了模型跟踪控制的情况下的操舵角和扭转扭矩的测定结果。在曲线图
中,横轴表示操舵角[deg],纵轴表示扭转扭矩[nm]。曲线图示出了从端到端(方向盘从向左完全转动的状态切换到向右完全转动的状态,或者反之)以角速度180[deg/s]操舵时测量到的波形。
[0095]
与不应用模型跟踪控制的情况相比,可知在应用了模型跟踪控制的情况下,若将用曲线图的单点划线包围的部分放大观察,则能够抑制扭矩波动。具体而言,可知扭转扭矩的变动量减少了0.1[nm]左右。
[0096]
在图11中示出了不应用模型跟踪控制的情况以及应用了模型跟踪控制的情况各自的操舵角的时间变化的测定结果。在曲线图中,横轴表示时间[sec],纵轴表示操舵角[deg]。用虚线的矩形表示车辆越过了台阶的时间的区域。可知通过将模型跟踪控制应用于扭矩控制,能够抑制车辆越过台阶时的操舵角的变动,从而适当地降低方向盘的转动。
[0097]
根据第1安装例,通过将模型跟踪控制应用于扭矩控制,能够减少干扰的高频成分。其结果为,能够适当地降低在操舵时可能产生的扭矩波动以及在车辆越过台阶时可能产生的方向盘的转动。
[0098]
【第2安装例】
[0099]
接着,参照图12至图14,对第2安装例的模型跟踪控制器进行说明。第2安装例的模型跟踪控制器在具有摩擦补偿计算器这一点上与第1安装例的模型跟踪控制器不同。以下,主要对与第1安装例的模型跟踪控制器的差异点进行说明。
[0100]
模型跟踪控制器推断的干扰中包含马达、减速齿轮等机械的摩擦,因此第2安装例的模型跟踪控制器构成为从推断干扰扭矩中取出摩擦成分,并将摩擦补偿应用于推断干扰扭矩。摩擦补偿的对象例如是马达的摩擦、减速齿轮的摩擦或者减速齿轮的摩擦左右差。
[0101]
若欲应用以往的摩擦补偿控制,则在马达的角速度ω为零附近时,为了防止振荡而不得不使摩擦补偿扭矩(nm)相对于马达的角速度ω的的变化缓慢,其结果为,存在无法进行高精度的摩擦补偿控制的情况。根据发明人的研究,为了解决该课题,优选依次推断摩擦并进行补偿。
[0102]
第2安装例的模型跟踪控制器构成为将干扰补偿扭矩反馈给控制对象的输入。具体而言,模型跟踪控制器具有:高通滤波器,其从推断干扰扭矩中去除低频成分;摩擦补偿计算器,其与高通滤波器并联耦合,对推断干扰扭矩应用摩擦补偿来计算机械的摩擦扭矩的推断值;以及加法器,其对由高通滤波器去除了低频成分的推断干扰扭矩加上摩擦扭矩的推断值,从而生成干扰补偿扭矩。在第2安装例中,推断干扰扭矩相当于“第1校正扭矩”,干扰补偿扭矩相当于“第2校正扭矩”。
[0103]
在图12中示出了第2安装例中的模型跟踪控制器230b的结构例。模型跟踪控制器230b与第1安装例的模型跟踪控制器230a同样地构成为进行模型跟踪控制。但是,模型跟踪控制的功能不是必须的。
[0104]
模型跟踪控制器230b具有摩擦补偿计算器250。摩擦补偿计算器250与高通滤波器233并联耦合,对推断干扰扭矩^td应用摩擦补偿来计算机械的摩擦扭矩的推断值。摩擦补偿计算器250具有减法器251、限幅器252以及增益调整器253。减法器251从来自低通滤波器232的输出值减去来自高通滤波器233的输出值。限幅器252对来自减法器251的输出值施加限制。限幅器252在输入值超过上限或下限的阈值的情况下,将输入值限制为上限或下限的阈值。
[0105]
增益调整器253对来自限幅器252的输出值施加增益k。在控制对象220的传递函数被约束在标称模型中的条件下,增益调整器253的增益k的最大值被决定。增益k的最大值例如设定为1至1.2左右。
[0106]
推断干扰扭矩^td包含有机械的摩擦。在干扰的推断中,根据马达的输出扭矩的传递路径,首先推断摩擦,接着推断自回正扭矩等作用于马达的扭矩。因此,摩擦补偿计算器250计算与最初推断出的干扰中的摩擦扭矩相当的值作为摩擦扭矩的推断值。通常来说,为了使eps需要适度的摩擦,通过将比实际作用的摩擦力小的值作为摩擦扭矩的推断值,能够在残留适度的摩擦力的同时实现高精度的摩擦补偿。
[0107]
为了对模型跟踪控制中使用的推断干扰扭矩应用摩擦补偿,需要注意模型跟踪控制的稳定性条件。该条件是根据上述的小增益定理,约束为考虑了稳定性的特性的摩擦补偿计算器250的传递函数的增益特性中的增益不超过1。这从低通滤波器232的设计条件导出。在第2安装例中,以始终满足该条件的方式将摩擦补偿增益、即增益k的值设为最大1,并且在该条件下以使增益特性中的增益成为1的方式在限幅器252的前级设置减法器251来应用减法处理。换言之,摩擦补偿计算器250作为具有1-hpf(s)传递函数的低通滤波器而发挥作用。
[0108]
推断干扰扭矩^td包含低频成分^t
d1
、中频成分^t
d2
以及高频成分^t
d3
。低通滤波器232从推断干扰扭矩^td中去除高频成分^t
d3
,高通滤波器233还从推断干扰扭矩^td中去除低频成分^t
d1
。这样,仅处于高通滤波器233的第1截止频率以上且低通滤波器232的第2截止频率以下的范围内的推断干扰扭矩的中频成分^t
d2
成为摩擦补偿的对象。但是,由于干扰所包含的设想的摩擦是干扰中的低频成分,因此根据上述的滤波处理,低频成分^t
d1
成为摩擦补偿的对象外。因此,通过将摩擦补偿计算器250与高通滤波器233并联耦合,将没有受高通滤波器233的滤波处理而被补偿的干扰的低频成分^t
d1
再次加入推断干扰扭矩^td,从而实现摩擦补偿。更详细而言,通过将在摩擦补偿计算器250中对低频成分^t
d1
乘以增益k而得到的值与中频成分^t
d2
相加,生成干扰补偿扭矩。另外,“^t
d1”是指图12所示的带帽檐的t
d1
,“^t
d2”是指图12所示的带帽檐的t
d2
,“^t
d3”是指图12所示的带帽檐的t
d3
。
[0109]
搭载有eps的车辆能够按照具有自动运转模式和手动运转模式的行驶模式行驶。在该情况下,增益调整器253的增益k也可以根据行驶模式而切换。增益k越大,摩擦的降低的程度越大。优选在自动运转模式时设定的增益k比在手动运转模式时设定的增益k大。由此,能够对进一步要求降低摩擦的自动运转模式应用最佳的摩擦补偿。
[0110]
模型跟踪控制器230b还具有加法器ad3。加法器ad3对来自高通滤波器233的输出值加上来自增益调整器的输出值。来自加法器ad3的输出作为干扰补偿扭矩而被反馈给控制对象220的输入。
[0111]
正在开发一种辅助装置,其在高速公路上行驶时等识别白线或黄线等车道,辅助追随车道的车辆的自动行驶。在搭载有eps和辅助装置的车辆中,已知若减速齿轮的摩擦存在左右差,则会对使车辆沿着车道的中心直行行驶的辅助装置的控制产生影响。根据本发明的实施方式的摩擦补偿控制,即使在减速齿轮的摩擦存在左右差的情况下,也能够依次计算摩擦扭矩的推断值,因此能够解决上述的课题。另外,作为设备模型的输出的马达的角速度ω包含与减速齿轮的摩擦的左右差相关的信息。
[0112]
本发明人等通过进行模拟来确认应用基于增益调整的摩擦补偿控制而得到的效
果。通过模拟,测定出基于摩擦补偿控制的摩擦的降低效果。
[0113]
在图13中示出了不应用基于增益调整的摩擦补偿控制的情况以及应用了基于增益调整的摩擦补偿控制的情况下的操舵角和操舵扭矩的模拟结果。在曲线图中,横轴表示操舵角[deg],纵轴表示操舵扭矩[nm]。虚线所示的曲线图示出了不应用摩擦补偿控制的情况下的波形,实线所示的曲线图示出了应用了摩擦补偿控制的情况下的波形。图中的箭头表示操舵扭矩的幅度,其幅度相当于摩擦的大小。可知通过应用摩擦补偿控制,能够适当地降低摩擦。
[0114]
在图14中示出了应用了现有的摩擦补偿控制的情况以及应用了基于增益调整的摩擦补偿控制的情况下的操舵角和操舵扭矩的模拟结果。在曲线图中,横轴表示操舵角[deg],纵轴表示操舵扭矩[nm]。虚线所示的曲线图示出了应用了现有的摩擦补偿控制的情况下的波形,实线所示的曲线图示出了应用了基于增益调整的摩擦补偿控制的情况下的波形。根据现有的摩擦补偿控制,如上所述,在马达的角速度ω为零附近时,为了防止振荡,不得不使摩擦补偿扭矩(nm)相对于马达的角速度ω的的变化缓慢。由此,在将方向盘转回时(参照图中的虚线的圆圈所包围的部分),在操舵扭矩中确认到尖峰。与此相对,可知在应用了基于增益调整的摩擦补偿控制的情况下,不确认尖峰,能够适当地降低摩擦。
[0115]
根据第2安装例,通过将基于增益调整的摩擦补偿控制进一步应用于扭矩控制,能够在减少干扰的高频成分的同时适当地降低摩擦。
[0116]
【第3安装例】
[0117]
在第3安装例中,控制对象具有方向盘521、万向联轴器523a、523b、旋转轴524、扭杆546、马达543以及减速齿轮544。第3安装例中的控制对象包含能够经由扭杆546相互相对旋转的部分,因此控制对象的运动无法仅通过单纯的1惯性系统的运动方程式进行记述。第3安装例中的控制对象根据车辆的驾驶员握持方向盘521的强度而在1惯性系统与2惯性系统之间变化。驾驶员越用力握住方向盘521,则控制对象越接近1惯性系统。驾驶员越轻轻握住方向盘,则控制对象越接近于2惯性系统。在第3安装例中,作为控制对象的输出,向模型跟踪控制器输入相当于减速齿轮544的角速度的角速度。
[0118]
在第3安装例中,将设备模型(标称模型)设为具有1惯性系统与2惯性系统之间的频率特性的模型。第3安装例中的设备模型(标称模型)的传递函数pn(s)由数学式7的数学式表示,逆设备模型的传递函数p
n-1
(s)由数学式8的数学式表示。
[0119]
【数学式7】
[0120][0121]
【数学式8】
[0122][0123]
在数学式7的数学式和数学式8的数学式中,s是拉普拉斯变换算子,j
stgn
是表示标称模型的惯性力矩的参数,b
stgn
是表示标称模型的粘性摩擦系数的参数,ω
1n
是传递函数pn(s)的零点的频率,ω
2n
是传递函数pn(s)的极点的频率,ζ
1n
是传递函数pn(s)的零点处的衰减比,ζ
2n
是传递函数pn(s)的极点处的衰减比。
[0124]
在第3安装例中,标称模型是具有1惯性系统与2惯性系统之间的频率特性的模型。表示上述标称模型的传递函数pn(s)的数学式7的数学式是对表示2惯性系统的式子加上衰减项而得的式子。在数学式7的数学式中,衰减项是2ζ
1n
ω
1n
s和2ζ
2n
ω
2n
s。从数学式7的数学式中去除这些衰减项而得到的式子成为表示2惯性系统的式子。在第3安装例中,标称模型的传递函数pn(s)的次数为3。
[0125]
在第3安装例中,标称模型是考虑了驾驶员(操舵者)对方向盘521进行操舵时的机械特性的模型。驾驶员越用力握住方向盘521,则控制对象越接近1惯性系统,驾驶员越轻轻握住方向盘521,则越接近2惯性系统。因此,第3安装例中的控制对象的传递函数p(s)根据从驾驶员的手臂向方向盘521如何施加力而在1惯性系统与2惯性系统之间变化。在第3安装例中,通过将标称模型设为具有1惯性系统与2惯性系统之间的频率特性的模型,即使在控制对象的状态为1惯性系统与2惯性系统之间的任一状态,标称模型的传递函数pn(s)与控制对象的传递函数p(s)的模型化误差δ(s)也不会变得过大。因此,无论驾驶员如何对方向盘521进行了操舵,都能够使用标称模型来适当地对控制对象进行控制。这样,在第3安装例中,标称模型成为考虑了由驾驶员的方向盘521的握持方式对控制对象赋予的机械特性的模型。第3安装例中的控制装置100通过具有这样的标称模型作为内部模型,能够进行控制对象的适当的控制。第3安装例中的其他结构能够与上述的其他安装例相同。
[0126]
产业上的可利用性
[0127]
本发明的实施方式能够应用于用于控制搭载于车辆的eps的马达的控制装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1