一种气体钢瓶智能搬运系统的制作方法
1.本发明涉及气体钢瓶搬运技术领域,具体地说,涉及一种气体钢瓶智能搬运系统,能全自动的实现气体钢瓶在厂房内的各个工作位置之间搬运。
背景技术:
2.目前,在很多气体作业厂房,尤其是电力系统中的六氟化硫气体处理中心,气瓶搬运工作不仅繁重,而且还存在许多作业风险,人工搬运气瓶效率低下,容易发生安全事故。常见的气瓶搬运多采用气瓶推车进行搬运。
技术实现要素:
3.为了克服现有技术的不足,本发明提供一种气体钢瓶智能搬运系统,本发明设计科学,能够实现气瓶智能搬运,作业安全,无需人工搬运,效率高。
4.为实现上述目的,本发明采用如下技术方案:一种气体钢瓶智能搬运系统,包括agv小车、机械臂和pc系统,agv小车上搭载有气瓶托盘,机械臂在气瓶装载区和气瓶卸载区各设置有一个,pc系统内集成有调度管理软件平台,调度管理软件平台分别与agv小车和机械臂信号连接。
5.气瓶托盘上左右间隔设置有若干个货位,气瓶托盘上设置有定位用二维码,气瓶托盘采用橡胶材质制作。
6.机械臂的运动端安装有气瓶抓具,气瓶抓具上安装有摄像头,调度管理软件平台分别与气瓶抓具和摄像头信号连接。
7.气瓶装载区和气瓶卸载区之间的地面上沿agv小车运动轨迹粘贴有若干个沿途导航定位二维码。
8.调度管理软件平台包含路径规划模块、搬运任务调度模块、气瓶气体信息读取模块和气瓶气体信息识别模块。
9.本发明相对现有技术具有突出的实质性特点和显著的进步,具体地说,本发明将agv小车与机械臂分开设计,机械臂在气瓶装载区和气瓶卸载区各设置有一个,当有多个气瓶装载区和气瓶卸载区时,每个气瓶装载区和气瓶卸载区也均设置一个机械臂,气瓶托盘上设置有定位用二维码,机械臂的运动端安装有气瓶抓具(本领域的常规技术),气瓶抓具用于抓起钢瓶,气瓶抓具上安装有摄像头,摄像头用于识别钢瓶及判断钢瓶抓取位置,同时还可以识别agv小车上的气瓶托盘上的定位用二维码,用于识别气瓶放下的位置,通过摄像头识别判断agv小车上的气瓶托盘上的空闲货位;agv小车可以实现中心更低、运行更安全,且有效降低单个agv小车的成本,当需要大量的搬运钢瓶时,只需要增加agv小车的数量,气瓶托盘采用橡胶材质制作,能够有效的增加气瓶与气瓶托盘的摩擦力,搬运气瓶更加安全;调度管理软件平台包含路径规划模块、搬运任务调度模块、气瓶气体信息读取模块和气瓶气体信息识别模块,调度管理软件平台可以按照工作人员的需要,设置从气瓶装载区装载钢瓶,到气瓶卸载区卸载钢瓶,并同时设定搬运钢瓶的数量,可以支持在多个气瓶装载区和
多个气瓶卸载区的运行。
10.综上所述,本发明设计科学,能够实现气瓶智能搬运,作业安全,无需人工搬运,效率高。
附图说明
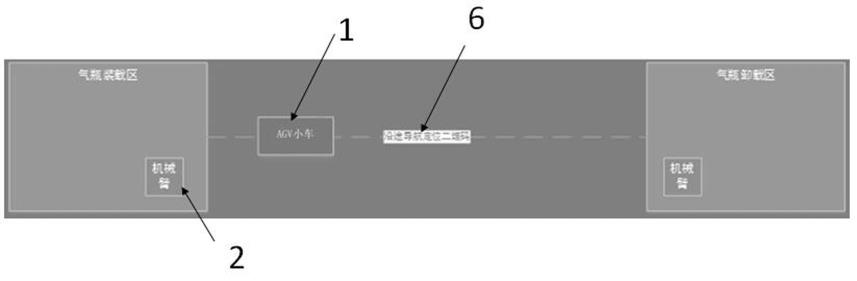
11.图1是本发明的作业示意图。
12.图2是本发明的agv小车的结构示意图。
具体实施方式
13.以下结合附图进一步说明本发明的实施例。
14.如图1和图2所示,一种气体钢瓶智能搬运系统,包括agv小车1、机械臂2和pc系统,agv小车1上搭载有气瓶托盘3,机械臂2在气瓶装载区和气瓶卸载区各设置有一个,pc系统内集成有调度管理软件平台,调度管理软件平台分别与agv小车1和机械臂2信号连接。
15.气瓶托盘3上左右间隔设置有若干个货位4,气瓶托盘3上设置有定位用二维码5,气瓶托盘3采用橡胶材质制作。
16.机械臂2的运动端安装有气瓶抓具,气瓶抓具上安装有摄像头,调度管理软件平台分别与气瓶抓具和摄像头信号连接。
17.气瓶装载区和气瓶卸载区之间的地面上沿agv小车1运动轨迹粘贴有若干个沿途导航定位二维码6。沿途导航定位二维码6的作用是:当agv小车1经过某一个沿途导航定位二维码6时,会自动识别到agv小车1当前所在的位置,此为常规技术。
18.调度管理软件平台包含路径规划模块、搬运任务调度模块、气瓶气体信息读取模块和气瓶气体信息识别模块。
19.agv小车1、机械臂2、气瓶抓具、摄像头、定位用二维码5和沿途导航定位二维码6均为常规技术,具体构造和工作原理不再赘述。pc系统、气瓶抓具和摄像头在图中均未示。
20.本发明将agv小车1与机械臂2分开设计,机械臂2在气瓶装载区和气瓶卸载区各设置有一个,当有多个气瓶装载区和气瓶卸载区时,每个气瓶装载区和气瓶卸载区也均设置一个机械臂2,气瓶托盘3上设置有定位用二维码5,机械臂2的运动端安装有气瓶抓具(本领域的常规技术),气瓶抓具用于抓起钢瓶,气瓶抓具上安装有摄像头,摄像头用于识别钢瓶及判断钢瓶抓取位置,同时还可以识别agv小车1上的气瓶托盘3上的定位用二维码5,用于识别气瓶放下的位置,通过摄像头识别判断agv小车1上的气瓶托盘3上的空闲货位4;agv小车1可以实现中心更低、运行更安全,且有效降低单个agv小车1的成本,当需要大量的搬运钢瓶时,只需要增加agv小车1的数量,气瓶托盘3采用橡胶材质制作,能够有效的增加气瓶与气瓶托盘3的摩擦力,搬运气瓶更加安全;调度管理软件平台包含路径规划模块、搬运任务调度模块、气瓶气体信息读取模块和气瓶气体信息识别模块,调度管理软件平台可以按照工作人员的需要,设置从气瓶装载区装载钢瓶,到气瓶卸载区卸载钢瓶,并同时设定搬运钢瓶的数量,可以支持在多个气瓶装载区和多个气瓶卸载区的运行。
21.以a区为气瓶装载区、b区为气瓶卸载区和一辆agv小车1为例,当用户需要将10个气瓶从a区搬运到b区,agv小车1的气瓶托盘3上具有三个货位4,此时,在调度管理软件平台中设置从a区搬运10个钢瓶到b区,此时将待搬运的钢瓶摆放在a区,启动搬运工作以后,调
度管理软件平台发送指令给agv小车1,agv小车1按照导航路径运行至a区停车区域, a区的机械臂2通过相应摄像头识别钢瓶放置的位置和抓取位置,控制机械臂2摆动并通过相应的气瓶抓具抓起钢瓶,然后通过相应摄像头识别agv小车1停放位置和定位用二维码5,然后识别气瓶托盘3上的三个货位4,找到空闲货位4后将气瓶放入气瓶托盘3,循环往复,完成三个钢瓶的装载,然后调度管理软件平台控制agv小车1运行至b区,此时控制b区的机械臂2动作,通过相应摄像头识别agv小车1位置和定位用二维码5,然后识别气瓶抓取位置,b区的机械臂2通过相应气瓶抓具将三个钢瓶一次卸下放置在气瓶缓存区,然后agv小车1再次回到a区,以此往复完成10个钢瓶的搬运任务,结束此次工作。
22.以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解;依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种气体钢瓶智能搬运系统,其特征在于:包括agv小车、机械臂和pc系统,agv小车上搭载有气瓶托盘,机械臂在气瓶装载区和气瓶卸载区各设置有一个,pc系统内集成有调度管理软件平台,调度管理软件平台分别与agv小车和机械臂信号连接。2.根据权利要求1所述的气体钢瓶智能搬运系统,其特征在于:气瓶托盘上左右间隔设置有若干个货位,气瓶托盘上设置有定位用二维码,气瓶托盘采用橡胶材质制作。3.根据权利要求2所述的气体钢瓶智能搬运系统,其特征在于:机械臂的运动端安装有气瓶抓具,气瓶抓具上安装有摄像头,调度管理软件平台分别与气瓶抓具和摄像头信号连接。4.根据权利要求2所述的气体钢瓶智能搬运系统,其特征在于:气瓶装载区和气瓶卸载区之间的地面上沿agv小车运动轨迹粘贴有若干个沿途导航定位二维码。5.根据权利要求1所述的气体钢瓶智能搬运系统,其特征在于:调度管理软件平台包含路径规划模块、搬运任务调度模块、气瓶气体信息读取模块和气瓶气体信息识别模块。
技术总结
一种气体钢瓶智能搬运系统,包括AGV小车、机械臂和PC系统,AGV小车上搭载有气瓶托盘,机械臂在气瓶装载区和气瓶卸载区各设置有一个,PC系统内集成有调度管理软件平台,调度管理软件平台分别与AGV小车和机械臂信号连接。本发明设计科学,能够实现气瓶智能搬运,作业安全,无需人工搬运,效率高。效率高。效率高。
技术研发人员:李建国 汪献忠 孙明
受保护的技术使用者:河南省日立信股份有限公司
技术研发日:2022.12.30
技术公布日:2023/3/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1