一种有缆载人潜水器作业系统及操作方法与流程
1.本发明涉及技术载人潜水器作业系统领域,尤其是一种有缆载人潜水器作业系统及操作方法。
背景技术:
2.目前国际上的大深度载人潜水器,如美国的“阿尔文”号、日本的“深海 6500”、中国的“蛟龙号”、“深海勇士号”、“奋斗者号”等均采用了自身携带蓄电池作为能量源的方式,与水面母船之间并没有供电、通讯电缆,载人潜水器与水面支持母船之间依靠水声通信方式进行文字、语音等数据信息的传输。
3.采用电池供电的优点在于没有了电缆的约束,载人潜水器在水下可以自由航行,在复杂地形下具有一定作业优势。
4.采用电池供电的缺点在于适用于大深度载人潜水器的耐压蓄电池价格昂贵,寿命周期较短,而且一旦电池组内部发生单体电池的短路有可能会导致整组电池报废,通常需要在水面母船上常备一整套蓄电池组,以应对海上可能发生的故障,维护使用成本较高。另一方面蓄电池在载人潜水器总重量中所占比重较大(如我国奋斗者号载人潜水器蓄电池总重约1.6吨),导致载人潜水器整体尺寸和重量的增大。此外,蓄电池组电量非常有限,载人潜水器无法长时间满功率运行推力器、照明灯及水下切割、钻磨、焊接等大功率作业工具,也严重制约了载人潜水器水下航行、作业能力。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种有缆载人潜水器作业系统及操作方法,从而采用潜水器本体并不携带蓄电池组,将水面母船产生的电能以电缆传输的方式接入载人潜水器,潜水器以有缆方式在水下航行、作业,有效的解决了载人潜水器使用蓄电池作为动力源所面临的成本高、重量大、能量有限等缺陷。
6.本发明所采用的技术方案如下:
7.一种有缆载人潜水器作业系统,包括水面母船,所述水面母船上设置有指挥控制舱、铠装缆绞车,水面母船的外部位置设置有定深器,所述指挥控制舱内安装有电控柜、水声信号处理单元和水面监控系统;还包括供电电缆,所述供电电缆接入电控柜后分为三路,第一路经过一号电缆接入铠装缆绞车,铠装缆绞车上缠绕有铠装电缆,铠装电缆通过导缆筒接入定深器,定深器后端通过脐带缆接入载人潜水器,第二路经二号电缆接入水声信号处理单元,第三路经三号电缆接入水面监控系统。
8.其进一步技术方案在于:
9.所述水面监控系统通过四号电缆与水声信号处理单元连接,水声信号处理单元分别通过五号电缆和六号电缆连接水声通信吊放基阵和水声定位吊放基阵;所述水面母船上还铰接有水面吊放系统,所述水面吊放系统通过油缸驱动摆动。
10.所述定深器的结构为:包括定深器本体,所述定深器本体内部中间位置安装有高
低压电源转换盒,高低压电源转换盒的两旁对称安装有一号铠装缆接线盒和二号脐带缆接线盒所述一号铠装缆接线盒上安装一号补偿油囊,二号脐带缆接线盒上安装二号补偿油囊,所述定深器本体内部还安装有深度计和高度计,所述定深器本体顶部设置有与铠装电缆连接的一号承重头,定深器本体的艉部安装有与脐带缆连接的二号承重头。
11.所述定深器本体采用中空壳状结构。
12.所述载人潜水器的结构为:包括载人潜水器本体,所述载人潜水器本体的一端通过电缆切割装置连接三号承重头,三号承重头与脐带缆连接。
13.一种有缆载人潜水器作业系统的操作方法,包括如下步骤:
14.(一)布放回收
15.第一步:预先连接供电链路,水声通信吊放基阵和水声定位吊放基阵布放到海面以下;
16.第二步:挂好载人潜水器本体的吊缆,操作水面吊放系统起吊载人潜水器本体并移送至水面母船尾部,操作水面吊放系统下放载人潜水器本体,解掉吊缆;
17.第三步:释放脐带缆,挂好定深器吊缆,操作水面吊放系统起吊定深器并移送至水面母船尾部,操作水面吊放系统下放定深器,解掉吊缆;
18.(二)下潜下放
19.载人潜水器本体完成水面检查操作后,开始注水下潜,同时启动铠装缆绞车,释放铠装电缆,定深器与载人潜水器本体下潜中保持深度同步,到工作深度后停止铠装缆绞车;
20.(三)水下作业
21.载人潜水器本体水下作业模式分为两种:
22.在第一种作业模式下,水面母船保持水面位置不变,载人潜水器本体在以定深器为圆心、脐带缆为活动半径的圆形范围内进行水下作业;
23.在第二种作业模式下,水面母船以设定航速、航向在水面航行,载人潜水器本体在水下以相同航速和航向行进,在此模式下可执行大范围海底地形扫描或作业目标区域转移。
24.本发明的有益效果如下:
25.本发明结构紧凑、合理,操作方便,通过指挥控制舱、供电电缆、水声通信吊放基阵、水声定位吊放基阵、铠装缆绞车、水面吊放系统、导缆筒、定深器、载人潜水器本体、水面母船等部件的互相配合工作,并在指挥控制舱内包含电控柜、水声信号处理单元、水面监控系统。由水面母船向载人潜水器的供电链路,以定深器作为电力中转站,电能通过配电柜进行高低压转换后,经铠装缆绞车、铠装缆接入定深器,再经定深器进行降压变频后流入脐带缆,最终输送至潜水器本体,为其上设备的运行提供电力。
26.载人潜水器本体与脐带缆连接处安装了电缆切割装置,当脐带缆发生缠绕时,通过所述电缆切割装置可切断脐带缆,保证载人潜水器本体的安全。
27.载人潜水器本体采集的视频信号通过供电链路传输回水面监控系统进行显示。为保障脐带缆切断后,语音、文字、定位等通讯信号不中断,载人潜水器本体采用水声通讯方式与水声通信吊放基阵、水声定位吊放基阵间进行通讯。
28.同时本发明还具备如下优点:
29.(1)在母船电力充足情况下,可源源不断的为载人潜水器本体提供电能输入,无须
考虑能源消耗问题,潜水器可搭载更大功率推力器、更大功率作业工具,实现水下高速航行及高强度、高效率水下作业;
30.(2)铠装缆和脐带缆技术成熟、可靠度高,相对使用蓄电池,其维护使用成本更低;
31.(3)载人潜水器本体没有蓄电池,可极大程度上降低浮力块使用量和潜水器主尺度,简化载人潜水器框架结构、机械装置的复杂程度,从而使载人潜水器的重量更轻、尺度更小、建造成本更低。
附图说明
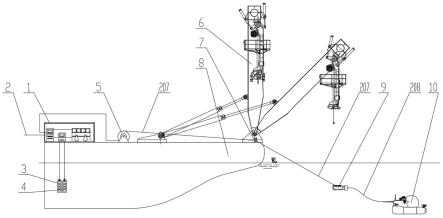
32.图1为本发明的结构示意图。
33.图2为本发明的局部视图。
34.图3为本发明定深器的结构示意图。
35.图4为本发明载人潜水器的安装示意图。
36.图5为图4的a向视图。
37.图6为本发明定深器的电缆连接图。
38.其中:1、指挥控制舱;2、供电电缆;3、水声通信吊放基阵;4、水声定位吊放基阵;5、铠装缆绞车;6、水面吊放系统;7、导缆筒;8、水面母船;9、定深器;10、载人潜水器;
39.101、电控柜;102、水声信号处理单元;103、水面监控系统;
40.201、一号电缆;202、二号电缆;203、三号电缆;204、四号电缆;205、五号电缆;206、六号电缆;207、铠装电缆;208、脐带缆;
41.901、一号承重头;902、定深器本体;903、二号承重头;904、一号铠装缆接线盒;905、一号补偿油囊;906、深度计;907、高低压电源转换盒;908、高度计;909、二号补偿油囊;910、二号脐带缆接线盒;
42.1001、三号承重头;1002、电缆切割装置;1003、载人潜水器本体。
具体实施方式
43.下面结合附图,说明本发明的具体实施方式。
44.如图1-图6所示,本实施例的有缆载人潜水器作业系统,包括水面母船8,水面母船8上设置有指挥控制舱1、铠装缆绞车5,水面母船8的外部位置设置有定深器9,指挥控制舱1内安装有电控柜101、水声信号处理单元102和水面监控系统103;还包括供电电缆2,供电电缆2接入电控柜101后分为三路,第一路经过一号电缆201接入铠装缆绞车5,铠装缆绞车5上缠绕有铠装电缆207,铠装电缆207通过导缆筒7接入定深器9,定深器9后端通过脐带缆208接入载人潜水器10,第二路经二号电缆202接入水声信号处理单元102,第三路经三号电缆203接入水面监控系统103。
45.水面监控系统103通过四号电缆204与水声信号处理单元102连接,水声信号处理单元102分别通过五号电缆205和六号电缆206连接水声通信吊放基阵3和水声定位吊放基阵4;水面母船8上还铰接有水面吊放系统6,水面吊放系统6通过油缸驱动摆动。
46.定深器9的结构为:包括定深器本体902,定深器本体902内部中间位置安装有高低压电源转换盒907,高低压电源转换盒907的两旁对称安装有一号铠装缆接线盒904和二号脐带缆接线盒910一号铠装缆接线盒904上安装一号补偿油囊905,二号脐带缆接线盒910上
安装二号补偿油囊909,定深器本体902内部还安装有深度计906和高度计908,定深器本体902顶部设置有与铠装电缆207连接的一号承重头901,定深器本体902的艉部安装有与脐带缆208 连接的二号承重头903。
47.定深器本体902采用中空壳状结构。
48.载人潜水器10的结构为:包括载人潜水器本体1003,载人潜水器本体1003 的一端通过电缆切割装置1002连接三号承重头1001,三号承重头1001与脐带缆208连接。
49.本实施例的有缆载人潜水器作业系统的操作方法,包括如下步骤:
50.(一)布放回收
51.第一步:预先连接供电链路,水声通信吊放基阵3和水声定位吊放基阵4 布放到海面以下;
52.第二步:挂好载人潜水器本体1003的吊缆,操作水面吊放系统6起吊载人潜水器本体1003并移送至水面母船8尾部,操作水面吊放系统6下放载人潜水器本体1003,解掉吊缆;
53.第三步:释放脐带缆208,挂好定深器9吊缆,操作水面吊放系统6起吊定深器9并移送至水面母船8尾部,操作水面吊放系统6下放定深器9,解掉吊缆;
54.(二)下潜下放
55.载人潜水器本体1003完成水面检查操作后,开始注水下潜,同时启动铠装缆绞车5,释放铠装电缆207,定深器9与载人潜水器本体1003下潜中保持深度同步,到工作深度后停止铠装缆绞车5;
56.(三)水下作业
57.载人潜水器本体1003水下作业模式分为两种:
58.在第本实施例的作业模式下,水面母船8保持水面位置不变,载人潜水器本体1003在以定深器9为圆心、脐带缆208为活动半径的圆形范围内进行水下作业;
59.在第二种作业模式下,水面母船8以设定航速、航向在水面航行,载人潜水器本体1003在水下以相同航速和航向行进,在此模式下可执行大范围海底地形扫描或作业目标区域转移。
60.本发明的具体结构和功能如下:
61.如图1和图2所示,本发明一种有缆载人潜水器作业系统,主要包括指挥控制舱1、供电电缆2、水声通信吊放基阵3、水声定位吊放基阵4、铠装缆绞车5、水面吊放系统6、导缆筒7、水面母船8、定深器9、载人潜水器10。
62.其中指挥控制舱1内安装有电控柜101、水声信号处理单元102和水面监控系统103,具有主配电控制、水面水下信息监控与通讯作用。
63.供电链路包括供电电缆2,供电电缆2接入电控柜101后分为三路:
64.第一路经一号电缆201接入铠装缆绞车5,铠装缆绞车5上缠绕有铠装电缆207,铠装电缆207通过导缆筒7接入定深器9,定深器9后端连接有脐带缆 208,脐带缆208另一端接入载人潜水器10;
65.第二路经二号电缆202接入水声信号处理单元102,水声信号处理单元102 与水声定位吊放基阵4通过五号电缆205连接,与水声通信吊放基阵3通过六号电缆206连接,与水面监控系统103通过四号电缆204连接;
66.第三路经三号电缆203接入水面监控系统103。
67.载人潜水器本体1003采用水声通讯方式与水声通信吊放基阵3和水声定位吊放基阵4保持语音、文字、定位数据通讯。
68.如图3所示,定深器9包括定深器本体902、一号铠装缆接线盒904、一号补偿油囊905、深度计906、高低压电源转换盒907、高度计908、二号补偿油囊909、二号脐带缆接线盒910。
69.定深器本体902顶部与铠装电缆207的一号承重头901连接,艉部与脐带缆208的二号承重头903相连接。
70.铠装电缆207即主缆w1接入一号铠装缆接线盒904后分为了电能传输的电缆w2和数据信号传输的光纤w7,光纤w7接入二号脐带缆接线盒910。电缆w2 接入高低压电源转换盒907后经降压变频处理后,一部分通过24v电缆w3和 110v电缆w4流向二号脐带缆接线盒910,并进一步通过脐带缆208为载人潜水器提供电力供给;另一部分通过电缆w6和电缆w5分别为定深器9上高度计908、深度计906供电。光纤w7用于传输载人潜水器10视频信号,高度计908用于测量距海底高度值,深度计906用于测量下潜深度值,上述数据信号通过供电链路最终返回至水面监控系统103。
71.载人潜水器10包括三号承重头1001、电缆切割装置1002、载人潜水器本体1003。
72.三号承重头1001通过电缆切割装置1002与载人潜水器10连接,当电缆发生缠绕导致载人潜水器发生危险时,可通过电缆切割装置1002断开三号承重头 1001、脐带缆208与载人潜水器本体1003的连接,保证载人潜水器本体1003 的安全。
73.本发明建立了由水面母船8向载人潜水器10的供电链路,载人潜水器10 由水面母船8供电,定深器9作为电力中转站,电能通过配电柜进行高低压转换后,经铠装缆绞车5、铠装电缆207接入定深器9,再经定深器9进行降压变频后流入脐带缆208,最终输送至载人潜水器本体1003,为其上设备的运行提供电力。
74.本发明所述的脐带缆208与载人潜水器10连接的一端设有电缆切割装置 1002,在脐带缆208与发生缠绕时,切断脐带缆208后载人潜水器本体1003 可与整套系统脱离,安全系数高。
75.本发明采用了定深器9作为供电链路电力中转站,定深器9内安装有一号铠装缆接线盒904、高低压电源转换盒907、二号脐带缆接线盒910,可以实现动力、通讯信号中转。
76.实际使用过程中:
77.(一)布放回收
78.有缆载人潜水器作业系统采用分段布放、分段回收方式。在布放与回收过程中母船保障人员、甲板操作人员、潜航员三方需要听从统一指挥、互相密切配合,严格按照布放回收操作规范流程进行操作。布放流程可以分为布放水声通信吊放基阵3和水声定位吊放基阵4、布放载人潜水器本体1003、布放定深器9、下放定深器9三大步,回收过程与之相反。
79.第一步:预先连接供电链路,水声通信吊放基阵3和水声定位吊放基阵4 布放到海面以下。
80.第二步:挂好载人潜水器本体1003吊缆,操作水面吊放系统6起吊载人潜水器本体1003并移送至水面母船8尾部,操作水面吊放系统6下放载人潜水器本体1003,解掉吊缆。
81.第三步:释放脐带缆208,挂好定深器9吊缆,操作水面吊放系统6起吊定深器9并移送至水面母船8尾部,操作水面吊放系统6下放定深器9,解掉吊缆。
82.(二)下潜下放
83.载人潜水器本体1003完成水面检查操作后开始注水下潜,同时启动铠装缆绞车5,释放铠装电缆207,定深器9与载人潜水器本体1003下潜中保持深度同步,到工作深度后停止铠装缆绞车5。下潜过程中,载人潜水器本体1003与水声通信吊放基阵3和水声定位吊放基阵4建立通讯连接。
84.(三)水下作业
85.载人潜水器本体1003水下作业模式分为两种。在第一种作业模式下,水面母船8保持水面位置不变,载人潜水器本体1003在以定深器9为圆心、脐带缆208为活动半径的圆形范围内进行水下作业。在第2种作业模式下,水面母船8 以设定航速、航向在水面航行,载人潜水器本体1003在水下以相同航速和航向行进,在此模式下可执行大范围海底地形扫描或作业目标区域转移。
86.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1