一种矢量推进的水下航行器及其航行方法与流程
1.本发明涉及水下航行技术领域,具体涉及一种矢量推进的水下航行器及其航行方法。
背景技术:
2.本发明对于背景技术的描述属于与本发明相关的相关技术,仅仅是用于说明和便于理解本发明的
技术实现要素:
,不应理解为申请人明确认为或推定申请人认为是本发明在首次提出申请的申请日的现有技术。
3.水下航行器是一种航行于水下的航行体,包括载人水下航行器和无人水下航行器,它能够完成水下勘探、侦测甚至是军事上的进攻防守等任务。但目前水下航行器的设计思路还在延续潜艇的设计思路,水下航行器的提高多体现在结构材料、航电系统、通信系统、控制系统等方面,缺乏总体设计上的创新。这种“细长体”构型的水下航行器在前行方向上具有阻力小,机动能力强的优点,但欠驱动的构型存在如下不足:一、机动能力差。传统构型航行器在非轴线方向的机动能力明显不足,体现为上浮、下沉机动能力弱,偏航能力弱,俯仰能力弱,不能左右机动和滚转机动。二、精确控制能力差。传统构型航行器不能精确控制航行器的姿态,航行器姿态的调节只能在运动中调节,不能独立调节姿态。因此,现有技术中的水下航行器存在机动能力差和不便精确控制的问题。
发明内容
4.本发明的目的在于提供一种矢量推进的水下航行器,以解决现有水下航行器存在机动能力差和不便精确控制的问题。
5.本发明解决上述技术问题的技术方案如下:一种矢量推进的水下航行器,包括:主体以及分别连接在主体四周的推进机构;主体呈“十”字型,包括:整流罩以及连接在整流罩四周的支臂,支臂远离整流罩的端部与推进机构连接,推进机构分别提供驱动力带动主体进行移动。
6.进一步地,上述推进机构包括:与支臂连接的泵舱、与泵舱连接的电机、位于泵舱外壁的舵机以及与舵机活动连接的矢量喷头,矢量喷头与泵舱连通,舵机用于带动矢量喷头转动。
7.进一步地,上述整流罩内腔设置有承载板,承载板顶面设有控制器,承载板的底面设有与控制器通信连接的动力电池。
8.进一步地,上述承载板的边缘设置有多个分别与支臂对应的防水电调,支臂贯穿整流罩与承载板连接。
9.进一步地,上述整流罩上贯穿设置有天线,天线的端部与承载板连接。
10.进一步地,上述整流罩呈球形。
11.一种矢量推进的水下航行器的航行方法,采用上述的矢量推进的水下航行器,包括 以下步骤:
s1:推进机构喷口朝下,带动主体纵向移动至水下合适深度;s2:推进机构工作,使得主体移动;s3:推进机构喷口持续转动,使得主体移动的同时调节方向。
12.本发明具有以下有益效果:(1)本发明以球形的整流罩和呈“十”字设置的支臂形成航行器的主体,在支臂端部分别设置有推进机构,推进机构以泵喷的方式带动主体进行前行移动以及方向调节,可使航行器位不改变位置和姿态的前提下进行方向调整,从而提高航行器的路径精准性。
13.(2)本发明的航行器可以无头模式下进行航行作业,可以无需考虑机头的朝向随意移动,使得航行器的前进后退机动能力与左右移动的机动能力并无差异,在遇到水下暗流等紧急情况时可以快速响应避让。
14.(3)本发明的航行器通过四个推进机构作为动力元件,解决了传统构型水下航行器机动能力弱,运动控制和姿态控制高度耦合以及姿态难以精准控制的问题。实现了水下航行器姿态控制和位置控制的解耦,使航行器可以在三个运动维度和三个转动维度上分别独立控制,实现了对水下航行器运动和姿态的精确控制。
15.(4)本发明还可以通过同时调节各个推进机构的功率和矢量喷头的方向,耦合控制航行器的位置和姿态,从而显著提高了航行器水下航行时的机动能力和抗干扰能力,提高了航行器在流水中的作业性能。
附图说明
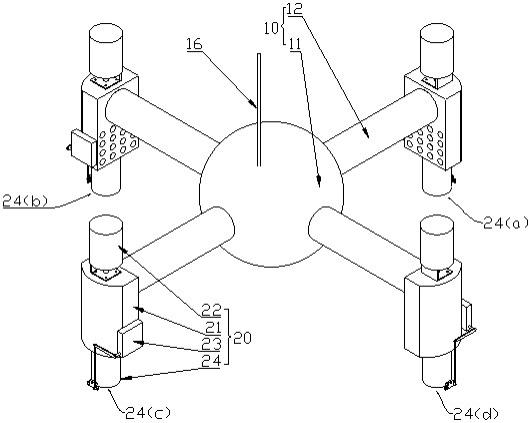
16.图1为本发明矢量推进的水下航行器的结构示意图;图2为本发明主体的内部剖视结构示意图。
17.图中:10-主体;11-整流罩;12-支臂;13-承载板;14-控制器;15-防水点调;16-天线;20-推进机构;21-泵舱;22-电机;23-舵机;24-矢量喷头。
具体实施方式
18.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
19.参考图1,一种矢量推进的水下航行器,包括:主体10以及分别连接在主体10四周的推进机构20,推进机构20用于提供动力源带动主体10进行水下航行移动。
20.主体10呈“十”字型,包括:整流罩11以及连接在整流罩11四周的支臂12,支臂12的数量为四个,四个支臂12远离整流罩11的端部与推进机构20连接,推进机构20的数量也为四个,方便带动主体10在上下、前后、左右三个维度进行位置调整。
21.参照图2,整流罩11内腔设置有承载板13,承载板13顶面设有控制器14,控制器14为写入整体航行器的控制程序的模块,并与整体航行器的各个电气元件通信连接,带动各个部件进行智能作业。承载板13的底面设有与控制器14通信连接的动力电池,通过动力电池提供动力源。
22.承载板13的边缘设置有多个分别与支臂12对应的防水电调15,防水电调15起到辅助调速的作用。支臂12贯穿整流罩11与承载板13连接,增加整体航行器的结构稳定性。整流罩11上贯穿设置有天线16,天线16的端部与承载板13顶面连接,主要起到通讯信号的传送
作用。整流罩呈球形11,避免在水下多方向移动时迎面阻力过大。
23.参照图1,推进机构20包括:与支臂12连接的泵舱21、与泵舱21连接的电机22、位于泵舱21外壁的舵机23以及与舵机23活动连接的矢量喷头24,矢量喷头24与泵舱21连通,舵机23用于带动矢量喷头24转动。矢量喷头24始终喷出一个向下的作用力,该作用力与整体航行器的重力反向,配合液体浮力对整体航行器进行支撑,可通过调整该作用力的大小,对整体航行器的上下深度方向的位置进行调节。
24.可将该航行器的四个矢量喷头24分别编号为a、b、c、d,其中a、c矢量喷头24共线,b、d矢量喷头24共线。
25.当航行器需要纵向机动时,通过舵机23使矢量喷头竖直向下,同时增大功率,使航行器受到向上的推力增大,当向上的推力加浮力大于航行器自身的重力时,航行器做上浮机动;操控舵机23,使矢量喷头24竖直向下,同时减小功率,使航行器受到向上的推力减小,当向上的推力加浮力小于航行器自身的重力时,航行器做下沉机动。
26.当航行器需要水平机动时,通过调节功率维持高度不便,操控舵机23调节矢量喷头24的方向实现航行器的水平机动。
27.若使航行器向前运动,则调节矢量喷头24(b)、矢量喷头24(d)的方向,使其向后偏转一定角度,使推进机构20的推力产生向前的分力,推动航行器向前运动。
28.若使航行器向后运动,则调节矢量喷头24(b)、矢量喷头d的方向,使其向前偏转一定角度,使推进机构20的推力产生向后的分力,推动航行器向后运动。
29.若使航行器向左运动,则调节矢量喷头24(a)、矢量喷头24(c)的方向,使其向右偏转一定角度,使推进机构20的推力产生向左的分力,推动航行器向左运动。
30.若使航行器向右运动,则调节矢量喷头24(a)、矢量喷头24(c)的方向,使其向左偏转一定角度,使推进机构20的推力产生向右的分力,推动航行器向右运动。
31.当航行器需要做偏航机动时,通过调节功率维持高度,并通过操控舵机23调节矢量喷头24的方向实现航行器的偏航机动。
32.若使航行器做顺时针偏航运动时,则调节矢量喷头24(a)、矢量喷头24(b)、矢量喷头24(c)、矢量喷头24(d)的方向,使其逆时针偏转一定角度,使推进机构20的推力产生顺时针的力矩,推动航行器做顺时针偏航机动。
33.若使航行器做逆时针偏航运动时,则调节矢量喷头24(a)、矢量喷头24(b)、矢量喷头24(c)、矢量喷头24(d)的方向,使其顺时针偏转一定角度,使推进机构20的推力产生逆时针的力矩,推动航行器做逆时针偏航机动。
34.若使航行器做俯仰运动时,则调节矢量喷头24(a)和矢量喷头24(c)的功率。增加矢量喷头24(a)的功率,减小矢量喷头24(c)的功率,航行器受到抬头力矩,航行器做抬头机动。此外,减小矢量喷头24(a)的功率,增加矢量喷头24(c)的功率,航行器受到低头力矩,航行器做低头机动。
35.若使航行器做滚转运动时,则调节矢量喷头24(b)和矢量喷头24(d)的功率。增加矢量喷头24(b)的功率,减小矢量喷头24(d)的功率,航行器受到右滚转力矩,航行器做右滚转机动。减小矢量喷头24(b)的功率,增加矢量喷头24(d)的功率,航行器受到左滚转力矩,航行器做左滚转机动。
36.若要求航行器做其他耦合机动,则可以复合控制推进机构20的功率和矢量喷头24
的方向,驱动航行器做复杂的耦合机动。
37.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1