一种可偏转的水下无人航行器推进装置的制作方法
1.本发明属于水下无人航行器矢量推进技术领域,具体涉及一种可偏转的水下无人航行器推进装置。
背景技术:
2.在水下无人航行器系统组成中,推进系统是水下无人航行器实现快速性和操纵性的核心部件。随着水下无人航行器应用领域的不断拓展,推进系统研究的重点是使电动机具有更高的转化动能效率,同时要求整个推进装置噪声更低、体积更小,具有高的机动性和强操纵性。
3.矢量推进是一种使运载平台产生方向矢量可变推进力的技术,推进方向的改变通过矢量偏转执行装置或机构来实现。矢量推进技术已经开始应用于航空、航天领域,但在水下无人航行器上的应用并不常见。当前采用矢量推进技术的水下航行器主要以锥齿轮、万向球等作为传动部件,液压系统或伺服电机作为驱动部件;整体结构冗余,重量大、传动部件易磨损、维护困难等特性限制了矢量推进技术在小型或特殊水下无人航行器中的可靠性能,提高了制造和维护成本,降低了运行效率。
4.通过减轻重量和简化执行装置,降低能耗成本并提高运行效率已经成为领域内的共识。对于结构设计而言,在保证足够的矢量偏转动力和整体可靠性基础上,实现结构轻量化和简洁化是重要的设计目标。采用轻质高强的材料或者优化结构设计的方式,可实现轻量化的目标;而为了满足偏转力矩需求,现有动力装置需要占用较大的空间,在追求结构简化的道路上仍面临巨大的挑战。
技术实现要素:
5.有鉴于此,本发明提供了一种可偏转的水下无人航行器推进装置,基于直线步进电机驱动偏转,能够减轻重量、简化执行装置、降低能耗成本并提高运行效率,最终提高水下无人航行器的操纵性能。
6.本发明是通过下述技术方案实现的:
7.一种可偏转的水下无人航行器推进装置,包括:矢量推进段和推进器;
8.所述矢量推进段采用外环套内环的结构形式,包括:上下偏转环、上下偏转驱动机构、左右偏转环、左右偏转驱动机构及固定框架;
9.所述上下偏转环销接在固定框架上,左右偏转环销接在上下偏转环上,所述推进器固定在左右偏转环上,用于产生推进力操控水下无人航行器运动;上下偏转驱动机构与上下偏转环连接,用于控制上下偏转环转动,进而驱动推进器上下偏转;左右偏转驱动机构与左右偏转环连接,用于控制左右偏转环转动,进而驱动推进器左右偏转。
10.进一步的,所述上下偏转环通过上下旋转轴安装在固定框架上,且上下偏转环可在上下偏转驱动机构的驱动下绕上下旋转轴的轴线偏转;
11.左右偏转环通过左右旋转轴安装在上下偏转环上,且左右偏转环在左右偏转驱动
机构的驱动下绕左右旋转轴的轴线偏转;
12.左右旋转轴的轴线与上下旋转轴的轴线垂直;且上下偏转环与上下旋转轴、左右偏转环与左右旋转轴均是过盈配合。
13.进一步的,所述上下偏转驱动机构和左右偏转驱动机构结构相同,均包括:耐压结构壳、直线步进电机及伸缩拉杆;所述直线步进电机安装在耐压结构壳内,对直线步进电机密封,伸缩拉杆的一端伸入到耐压结构壳内,并通过连接件与直线步进电机的输出轴同轴相连,另一端伸出于耐压结构壳,且伸缩拉杆与耐压结构壳的接触处设有动密封。
14.进一步的,所述上下偏转驱动机构和左右偏转驱动机构均位于固定框架内;左右偏转驱动机构的伸缩拉杆末端与左右偏转环固连,当左右偏转驱动机构的伸缩拉杆发生伸缩运动时,驱动左右偏转环与推进器的整体绕左右旋转轴的轴线进行左右偏转;上下偏转驱动机构的伸缩拉杆与上下偏转环连接,当上下偏转驱动机构的伸缩拉杆发生伸缩运动时,驱动上下偏转环、左右偏转驱动机构、左右偏转环和推进器的整体绕上下旋转轴的轴线进行上下偏转。
15.进一步的,所述固定框架外侧面固定有外壳蒙皮。
16.有益效果:
17.(1)本发明提出了一种可偏转的水下无人航行器推进装置,该装置内的矢量推进段采用外环套内环的结构形式,即上下偏转环销接在固定框架上,左右偏转环销接在上下偏转环上,推进器固定在左右偏转环上的结构形式,整体结构简单紧凑,在保证足够的矢量偏转动力和整体可靠性基础上,实现了结构轻量化和简洁化。
18.(2)本发明的上下偏转环通过上下旋转轴安装在固定框架上,左右偏转环通过左右旋转轴安装在上下偏转环上,且上下偏转环与上下旋转轴、左右偏转环与左右旋转轴均是过盈配合,左右旋转轴和上下旋转轴分别作为上下偏转环和左右偏转环的安装固定件,具有足够的刚度和耐磨性支撑上下偏转环和左右偏转环转动,且方便拆卸及维护保养。
19.(3)本发明的上下偏转驱动机构和左右偏转驱动机构均包括耐压结构壳、直线步进电机及伸缩拉杆;采用直线步进电机作为偏转环转动的驱动器和锁紧机构,控制推进器的偏转与锁紧,实现偏转角度的精确可控。
附图说明
20.图1是本发明中可偏转的水下无人航行器推进装置整体示意图;
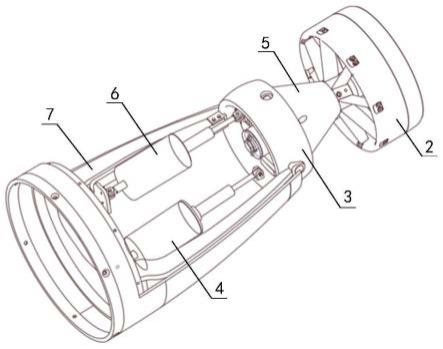
21.图2是本发明中推进装置内部结构示意图;
22.图3是本发明中偏转环结构示意图;
23.图4是本发明中偏转驱动机构结构示意图;
24.图5是本发明中推进器上下偏转动作示意图;
25.图6是本发明中推进器左右偏转动作示意图;
26.其中:1-矢量推进段,2-推进器,3-上下偏转环,4-上下偏转驱动机构,5-左右偏转环,6-左右偏转驱动机构,7-固定框架,8-左右旋转轴,9-上下旋转轴,10-直线步进电机,11-伸缩拉杆。
具体实施方式
27.下面结合附图并举实施例,对本发明进行详细描述。
28.本实施例提供了一种可偏转的水下无人航行器推进装置,安装在水下无人航行器尾部,参见附图1,包括:矢量推进段1和推进器2;
29.所述矢量推进段1采用外环套内环的结构形式,且为透水结构(即海水可进入到矢量推进段1内部),参见附图2,矢量推进段1包括:上下偏转环3、上下偏转驱动机构4、左右偏转环5、左右偏转驱动机构6及固定框架7;
30.所述推进装置的整体连接关系为:所述固定框架7用于安装两个偏转驱动器和两个偏转环,同时用于固定推进装置的外壳蒙皮;所述上下偏转环3销接在固定框架7上,左右偏转环5销接在上下偏转环3上,所述推进器2通过法兰盘固定限位在左右偏转环5上,并利用螺钉紧固,推进器2用于产生推进力操控水下无人航行器运动;上下偏转驱动机构4与上下偏转环3连接,用于控制上下偏转环3转动,进而驱动推进器2上下偏转;左右偏转驱动机构5与左右偏转环连接,用于控制左右偏转环6转动,进而驱动推进器2左右偏转;上下偏转驱动机构4和左右偏转驱动机构6既是驱动器也是锁紧机构,控制推进器2的偏转与锁紧,偏转角度精确可控;该推进装置的尺寸、接口、功率、偏转角可依据水下无人航行器的指标要求设计,即依据所搭载的水下无人航行器尺寸、推进功率、操纵力需求,本实施例的矢量推进段1整体可按照比例缩放。
31.进一步的,参见附图3,所述上下偏转环3通过上下旋转轴9安装在固定框架7上,且上下偏转环3可在上下偏转驱动机构4的驱动下绕上下旋转轴9的轴线偏转;左右偏转环5通过左右旋转轴8安装在上下偏转环3上,且左右偏转环5在左右偏转驱动机构6的驱动下绕左右旋转轴8的轴线偏转;且左右旋转轴8的轴线与上下旋转轴9的轴线垂直;左右旋转轴8和上下旋转轴9分别作为上下偏转环3和左右偏转环5的安装固定件,设计时要考虑精度要求,同时要方便拆卸及维护保养;且上下偏转环3与上下旋转轴9、左右偏转环5与左右旋转轴8均是过盈配合,上下旋转轴9和左右旋转轴8有足够的刚度和耐磨性用于支撑上下偏转环3和左右偏转环5转动;
32.所述上下偏转驱动机构4和左右偏转驱动机构6结构相同,均为整体耐压密封结构,参见附图4,均包括:耐压结构壳、直线步进电机10及伸缩拉杆11;所述直线步进电机10安装在耐压结构壳内,实现对直线步进电机10的密封,伸缩拉杆11的一端伸入到耐压结构壳内,并通过连接件(如联轴器)与直线步进电机10的输出轴同轴相连,另一端伸出于耐压结构壳,且伸缩拉杆11与耐压结构壳的接触处设有动密封;其中,所述直线步进电机10的型号依据需要提供的驱动力和驱动行程选择,直线步进电机10的驱动力由系统摩擦力和带动推进器2的偏转力等综合计算,伸缩拉杆11的行程大小与推进器2的偏转角度相关;
33.所述上下偏转驱动机构4和左右偏转驱动机构6均位于固定框架7内;左右偏转驱动机构6的伸缩拉杆11末端与左右偏转环5固连,参见附图6,当左右偏转驱动机构6的伸缩拉杆11发生伸缩运动时,可以驱动左右偏转环5与推进器2的整体绕左右旋转轴8的轴线进行左右偏转;上下偏转驱动机构4的伸缩拉杆11与上下偏转环3连接,参见附图5,当上下偏转驱动机构4的伸缩拉杆11发生伸缩运动时,可以驱动上下偏转环3、左右偏转驱动机构6、左右偏转环5和推进器2的整体绕上下旋转轴9的轴线进行上下偏转。
34.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1