飞行体的制作方法
1.本发明涉及具备多个马达的飞行体。
背景技术:
2.在以无人机等为代表的具有多个马达的飞行体搭载多个电池组(例如,参照专利文献1),采用将多个马达和多个电池组一对一地建立对应并连接的方式的情况下,由于多个马达间的负载的偏差,多个电池组间的剩余容量(soc:state of charge)产生偏差。该情况下,在一个电池组的soc为0%的时刻,即使其他电池组的soc不为0%,也不能继续飞行。也就是说,不能有效利用其他电池组的能量。这意味着实际的飞行距离比以多个电池组的全部能量而本来能够飞行的可飞行距离短。
3.此外,由于多个马达间的负载的偏差,多个电池组间的充放电速率、放电深度也产生偏差,劣化状态(soh:state of health)的进展程度也产生偏差。soh降低的电池组的满充电容量(fcc:full charge capacity)比其他电池组的fcc少,因此可飞行距离的减少进一步加速。
4.在先技术文献
5.专利文献
6.专利文献1:日本特开2016-222031号公报
技术实现要素:
[0007]-发明要解决的课题-[0008]
本公开鉴于这种状况而作出,其目的在于,提供一种抑制对机体平衡的影响并且有效利用搭载于飞行体的多个蓄电组的容量的技术。
[0009]-解决课题的手段-[0010]
为了解决上述课题,本公开的某个方式的飞行体是具备主体部和从所述主体部左右对称地配置为放射状的多个螺旋桨的飞行体,所述飞行体具备:多个马达,使所述多个螺旋桨分别旋转;多个蓄电组,向所述多个马达分别提供电流;和预备蓄电组,分别通过电力布线来与所述多个蓄电组连接。所述多个马达在左右各设置相同数量,所述多个蓄电组在左右各设置相同数量,所述预备蓄电组被设置于所述主体部的左右的中心线上。
[0011]-发明效果-[0012]
根据本公开,能够抑制对机体平衡的影响,并且有效利用搭载于飞行体的多个蓄电组的容量。
附图说明
[0013]
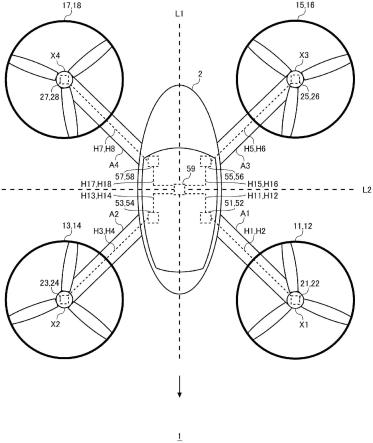
图1是从上方观察实施方式所涉及的飞行体的概略图。
[0014]
图2是从正面观察实施方式所涉及的飞行体的概略图。
[0015]
图3是从上方观察实施方式的变形例所涉及的飞行体的概略图。
[0016]
图4是搭载有实施方式所涉及的电源系统的飞行体的功能框图。
[0017]
图5是表示搭载于飞行体的蓄电组的内部结构例的图。
[0018]
图6是表示搭载于飞行体的8个蓄电组的充电时的连接状态的图。
[0019]
图7是表示飞行体的飞行中的电源系统的状态的一个例子的图。
[0020]
图8是用于对飞行体停机中的第1蓄电组-第8蓄电组间的容量的均衡化处理的一个例子进行说明的图(其1)。
[0021]
图9是用于对飞行体停机中的第1蓄电组-第8蓄电组间的容量的均衡化处理的一个例子进行说明的图(其2)。
[0022]
图10是用于对飞行体停机中的第1蓄电组-第8蓄电组间的容量的均衡化处理的一个例子进行说明的图(其3)。
具体实施方式
[0023]
图1是从上方观察实施方式所涉及的飞行体1的概略图。图2是从正面观察实施方式所涉及的飞行体1的概略图。实施方式所涉及的飞行体1是所谓的被称为飞行汽车或者载人无人机的多旋翼直升机。实施方式所涉及的飞行体1具备8个螺旋桨11-18。在主体部2对角线状地设置4根臂,在各臂的前端在垂直方向的上下分别设置2个螺旋桨。由此,飞行体1成为8个螺旋桨11-18从主体部2左右对称地放射状地配置的结构。
[0024]
在支承第1螺旋桨11和第2螺旋桨12的第1支轴x1内,分别设置用于使第1螺旋桨11旋转的第1马达21、用于使第2螺旋桨12旋转的第2马达22。同样地,在支承第3螺旋桨13和第4螺旋桨14的第2支轴x2内,设置第3马达23和第4马达24,在支承第5螺旋桨15和第6螺旋桨16的第3支轴x3内,设置第5马达25和第6马达26,在支承第7螺旋桨17和第8螺旋桨18的第4支轴x4内,设置第7马达27和第8马达28。
[0025]
在将主体部2与第1支轴x1连结的第1臂a1的主体部2侧的靠根部附近,设置用于向第1马达21提供电流的第1蓄电组51、用于向第2马达22提供电流的第2蓄电组52。同样地,在第2臂a2的主体部2侧的靠根部附近设置第3蓄电组53和第4蓄电组54,在第3臂a3的主体部2侧的靠根部附近设置第5蓄电组55和第6蓄电组56,在第4臂a4的主体部2侧的靠根部附近设置第7蓄电组57和第8蓄电组58。
[0026]
在第1臂a1内,穿过将第1马达21与第1蓄电组51之间连接的第1线束h1、将第2马达22与第2蓄电组52之间连接的第2线束h2。同样地,在第2臂a2内,穿过第3线束h3和第4线束h4,在第3臂a3内,穿过第5线束h5和第6线束h6,在第4臂a4内,穿过第7线束h7和第8线束h8。
[0027]
为了抑制因第1线束h1-第8线束h8的电阻引起的电压下降的偏差,期望使第1线束h1-第8线束h8的布线电阻一致。具体地说,期望通过长度和粗度相同的第1线束h1-第8线束h8,将第1螺旋桨11-第8螺旋桨18与第1蓄电组51-第8蓄电组58之间分别连接。
[0028]
在本实施方式中,除了第1蓄电组51-第8蓄电组58,还追加设置预备蓄电组59。预备蓄电组59的作用后述。第1蓄电组51-第8蓄电组58与预备蓄电组59之间分别通过第11线束h11-第18线束h18而连接。
[0029]
图1所示的飞行体1被设计为飞行体1的重心位置可位于飞行体1的前后左右的中心位置。在用于空中摄影、农药飞散等的无人的多旋翼直升机中,被设计为左右对称并且前后对称的情况较多。该情况下,机体的重心位置与中心位置一致。在人们乘坐的有人的多旋
翼直升机的情况下,由于需要座位,因此难以将机体设计为前后对称。
[0030]
在图1所示的例子中,设计为调整座位、其他搭载物的位置,从而重心位置位于飞行体1(主体部2)的左右中心线l1与前后中心线l2的交点(飞行体1的中心点)。预备蓄电组59被设置于该重心部分。预备蓄电组59的上下方向(铅垂方向)的设置位置并不被特别限定,但设置于比搭乘者更靠下侧的位置为宜。例如,设置于座位的下方或者主体部2的下方为宜。
[0031]
为了抑制因第11线束h11-第18线束h18的电阻引起的电压下降的偏差,期望使第11线束h11-第18线束h18的布线电阻一致。
[0032]
如图1所示,预备蓄电组59被设置于机体(主体部2)的中心部分的情况下,从预备蓄电组59到第1蓄电组51-第8蓄电组58的距离相等,自然为等长布线。也就是说,若通过相同的线束,分别将预备蓄电组59与第1蓄电组51-第8蓄电组58间连接,则能够使布线电阻一致。
[0033]
图3是从上方观察实施方式的变形例所涉及的飞行体1的概略图。变形例所涉及的飞行体1被设计为前后的重心位置位于比前后中心线l2更向前方偏移的位置。在有人的多旋翼直升机的情况下,由于确定了作为行进方向的正面的朝向,因此设计为使重心位置位于比上升力的中心位置更靠前方的位置的情况较多。该情况下,机首下降的力矩发挥作用,容易在行进方向加速。此外,机首的上升下降的稳定性提高。
[0034]
在图3所示的例子中,被设计为重心位置位于飞行体1的左右中心线l1与从前后中心线l2向前方滑动的线l3的交点。预备蓄电组59被设置于该重心部分。
[0035]
在图3所示的例子中,从预备蓄电组59到第1蓄电组51-第8蓄电组58的距离不相等。即使是这样的状态,也期望将预备蓄电组59与第1蓄电组51-第8蓄电组58之间分别通过第11线束h11-第18线束h18而连接,以使得预备蓄电组59与第1蓄电组51-第8蓄电组58之间的各个布线电阻相等。在使用相同的线束的情况下,使与接近于预备蓄电组59的第1蓄电组51-第4蓄电组54连接的第11线束h11-第14线束h14具有游隙地配置。
[0036]
此外,也可以在与接近于预备蓄电组59的第1蓄电组51-第4蓄电组54所连接的第11线束h11-第14线束h14、和与远离于预备蓄电组59的第5蓄电组55-第8蓄电组58所连接的第15线束h15-第18线束h18中,使用不同型号的线束。例如,通过使用粗度不同的线束,能够使预备蓄电组59与第1蓄电组51-第8蓄电组58间的各个布线电阻大致相等。
[0037]
图4是搭载有实施方式所涉及的电源系统的飞行体1的功能框图。飞行体1具备:8个螺旋桨11-18、8个马达21-28、8个马达驱动部31-38、机体控制部40、传感器41以及电源系统。
[0038]
8个马达21-28与8个螺旋桨11-18的旋转轴分别连接。8个马达驱动部31-38分别驱动8个马达21-28。8个马达驱动部31-38分别包含逆变器。各逆变器将从各蓄电组提供的直流电流转换成与从机体控制部40指定的指令值相应的交流电流并提供给各马达。8个马达21-28以与分别从8个马达驱动部31-38提供的交流电流相应的转速,使8个螺旋桨11-18分别旋转。
[0039]
机体控制部40能够包含微型计算机以及非易失性存储器(例如,eeprom(electrically erasable programmable read-only memory)、闪存存储器)。传感器41是搭载于飞行体1的各种传感器的总称。例如作为传感器41,搭载陀螺仪传感器、加速度传感
器、气压传感器、超声波传感器、磁方位传感器、gps(global positioning system)传感器。
[0040]
陀螺仪传感器对飞行体1的角速度进行检测并输出给机体控制部40。加速度传感器对飞行体1的加速度进行检测并输出给机体控制部40。机体控制部40基于被输入的角速度和加速度,推断飞行体1的姿态和速度。气压传感器对飞行体1位置的地点的气压进行检测并输出给机体控制部40。超声波传感器接收放射的超声波的反射波,并输出给机体控制部40。机体控制部40基于被输入的气压和超声波的反射波,推断飞行体1的高度。
[0041]
磁方位传感器基于地磁来检测方位并输出给机体控制部40。机体控制部40基于被输入的方位来推断飞行体1的行进方向。gps传感器从多个gps卫星分别接收包含各个发信时刻的电波,基于接收的多个电波中分别包含的多个发信时刻来检测接收地点的纬度经度,并输出给机体控制部40。机体控制部40基于被输入的纬度经度,推断飞行体1的当前位置。
[0042]
机体控制部40基于规定的机体控制程序、从传感器41输入的检测信息以及搭乘于主体部2的驾驶员的操作信息,确定8个马达21-28的各自的转速。另外,在无人机的情况下,取代搭乘于主体部2的驾驶员的操作信息,使用远程发送的操作信息以及规定的自动飞行程序的至少一者。
[0043]
机体控制部40基于确定的8个马达21-28的各自的转速,生成对8个马达驱动部31-38分别设定的指令值。机体控制部40与8个马达驱动部31-38之间分别通过信号线(未图示)连接。机体控制部40将生成的指令值分别经由各个信号线而提供给8个马达驱动部31-38。另外,也可以不设置信号线,而通过无线将指令值从机体控制部40分别传达至8个马达驱动部31-38。
[0044]
机体控制部40在使飞行体1向任一方向移动的情况下,使行进方向的马达的转速降低,使与行进方向相反的方向的马达的转速上升。通过该控制,飞行体1成为前倾姿态,飞行体1能够在行进方向移动。
[0045]
此外,飞行体1的相邻的马达的旋转方向为相反方向。机体控制部40在使飞行体1向任一方向旋转的情况下,相对于在与使其旋转的方向相同方向旋转的马达的转速,增加在与使其旋转的方向相反的方向旋转的马达的转速。通过该控制,产生使飞行体1旋转的方向的旋转力,飞行体1在旋转方向旋转。
[0046]
搭载于飞行体1的电源系统具有:8个蓄电组51-58、预备蓄电组59、8个第1开关s11-s18、8个第2开关s21-s28、dc/dc转换器60以及电源控制部70。
[0047]
8个蓄电组51-58是用于向8个马达驱动部31-38分别提供电流的电源装置。预备蓄电组59是能够向将8个马达驱动部31-38与8个蓄电组51-58之间连接的8根第1电流路径提供电流、或者从8根第1电流路径吸收电流的辅助电源装置。
[0048]
8个第1开关s11-s18分别被插入到将8根第1电流路径与预备蓄电组59之间连接的8根第2电流路径上。预备蓄电组59能够经由8个第1开关s11-s18,与8根第1电流路径的任意的电流路径导通。8个第2开关s21-s28在8根第1电流路径上,分别被插入到8根第2电流路径所连接的8个连接点n1-n8与8个蓄电组51-58之间。第1开关s11-s18以及第2开关s21-s28可以由继电器构成,也可以由半导体开关构成。
[0049]
8根第2电流路径的预备蓄电组59侧的前端耦合为1根。在其耦合点n9与预备蓄电组59之间连接dc/dc转换器60。dc/dc转换器60是双向dc/dc转换器,能够对向预备蓄电组59
充电时的充电电压或者充电电流、以及从预备蓄电组59放电时的放电电压或者放电电流进行控制。在耦合点n9,也连接充电口p1所连接的充电路径。
[0050]
电源控制部70能够包含微型计算机以及非易失性存储器。电源控制部70与8个蓄电组51-58通过通信线71而连接。电源控制部70能够对8个第1开关s11-s18以及8个第2开关s21-s28进行控制,调整8个蓄电组51-58间的容量的平衡。
[0051]
图5是表示搭载于飞行体1的蓄电组51的内部结构例的图。蓄电组51包含蓄电模块511以及控制基板512。蓄电模块511包含串联连接的多个单元e1-en。另外,蓄电模块511也可以多个蓄电模块串联/串并联连接而构成。能够对单元使用锂离子电池单元、镍氢电池单元、铅电池单元、双电层电容器单元、锂离子电容器单元等。以下,在本说明书中,假定使用锂离子电池单元(标称电压:3.6-3.7v)的例子。单元e1-en的串联数根据马达21的驱动电压而确定。
[0052]
分流电阻rs与多个单元e1-en串联连接。分流电阻rs作为电流检测元件而发挥功能。另外,也可以取代分流电阻rs而使用霍尔元件。在蓄电模块511内,设置用于检测多个单元e1-en的温度的温度传感器t1(例如,热敏电阻)。另外,也可以设置多个温度传感器t1。
[0053]
在控制基板512,设置电压测量部513、温度测量部514、电流测量部515以及管理部516。电压测量部513与串联连接的多个单元e1-en的各节点之间通过多个电压测量线而连接。电压测量部513通过分别对相邻的2根电压测量线间的电压进行测量,来测量各单元e1-en的电压。电压测量部513将测量出的各单元e1-en的电压发送给管理部516。
[0054]
由于电压测量部513相对于管理部516为高压,因此电压测量部513与管理部516之间在绝缘的状态下通过通信线而连接。电压测量部513能够包含asic(application specific integrated circuit,专用集成电路)或者通用的模拟前端ic。电压测量部513包含多工器以及a/d转换器。多工器将相邻的2根电压测量线间的电压从上起依次输出到a/d转换器。a/d转换器将从多工器输入的模拟电压转换为数字值。
[0055]
温度测量部514包含分压电阻以及a/d转换器。a/d转换器将通过温度传感器t1和分压电阻分压的模拟电压转换为数字值并输出给管理部516。管理部516基于该数字值来推断多个单元e1-en的温度。
[0056]
电流测量部515包含差动放大器以及a/d转换器。差动放大器对分流电阻rs的两端电压进行放大并输出给a/d转换器。a/d转换器将从差动放大器输入的模拟电压转换为数字值并输出给管理部516。管理部516基于该数字值来推断流向多个单元e1-en的电流。
[0057]
另外,在管理部516内搭载a/d转换器,在管理部516设置有模拟输入端口的情况下,温度测量部514以及电流测量部515也可以将模拟电压输出给管理部516,通过管理部516内的a/d转换器来转换为数字值。
[0058]
管理部516能够包含微型计算机以及非易失性存储器。管理部516基于通过电压测量部513、温度测量部514以及电流测量部515而测量的多个单元e1-en的电压、温度以及电流来管理多个单元e1-en的状态。
[0059]
管理部516能够推断多个单元e1-en的各自的soc以及soh。管理部516能够通过ocv(open circuit voltage)法或者电流累积法来推断soc。
[0060]
soh通过当前的fcc相对于初始的fcc的比率而规定,数值越低(越接近于0%)表示劣化越发展。soh可以通过基于完全充放电的容量测量而求取,也可以通过对保存劣化和循
环劣化进行合计来求取。保存劣化能够基于soc、温度以及保存劣化速度来推断。循环劣化能够基于使用的soc范围、温度、电流速率以及循环劣化速度来推断。保存劣化速度以及循环劣化速度能够预先通过实验、模拟来导出。soc、温度、soc范围以及电流速率能够通过测量来求取。
[0061]
此外,soh也能够基于与单元的内部电阻的相关关系来推断。内部电阻能够通过将规定的电流向单元流过规定时间时产生的电压下降除以该电流值来推断。内部电阻处于温度越上升则越降低的关系,并处于soh越降低则越增加的关系。
[0062]
蓄电组51作为外部端子,具备:与蓄电模块511的正极连接的正极端子+、与蓄电模块511的负极连接的负极端子-、以及与控制基板512连接的控制端子cnt。在控制端子cnt连接通信线71。管理部516经由通信线71,按每个规定的期间,将多个单元e1-en的监视数据发送给电源控制部70。作为监视数据,发送多个单元e1-en的电压、温度以及电流。另外,关于soc以及soh,管理部516可以推断soc以及soh并发送给电源控制部70,也可以基于电源控制部70接收的电压、温度以及电流来进行推断。
[0063]
8个蓄电组51-58与电源控制部70之间的通信协议例如能够使用rs-485、tcp/ip、can(controller area network)等。另外,8个蓄电组51-58与电源控制部70之间可以通过无线通信来连接,也可以通过电力线通信来连接。
[0064]
图6是表示搭载于飞行体1的8个蓄电组51-58的充电时的连接状态的图。通过向充电口p1插入充电线缆4a,能够从设置于外部的充电器4对8个蓄电组51-58以及预备蓄电组59进行充电。在本实施方式中,作为充电器4,假定具有将从商用电力系统5提供的3相交流电力转换为直流电力的电力转换功能的快速充电器。充电器4对从商用电力系统5提供的交流电力进行全波整流,通过利用滤波器进行平滑化来生成直流电力。
[0065]
在开始第1蓄电组51-第8蓄电组58的充电前,电源控制部70为了防止冲击电流,控制dc/dc转换器60来对预备蓄电组59进行充电。然后,电源控制部70将第1.1开关s11以及第2.1开关s21接通来从充电器4对第1蓄电组51进行充电。此时,预备蓄电组59作为充电电压的平滑化容量而发挥作用。
[0066]
若第1蓄电组51的充电结束,则电源控制部70将第1.1开关s11以及第2.1开关s21断开,接下来将第1.2开关s12以及第2.2开关s22接通,从充电器4对第2蓄电组52进行充电。以下同样地,依次进行充电直到第8蓄电组58。
[0067]
另外,电源控制部70也可以将第1.1开关s11-第1.8开关s18以及第2.1开关s21-第2.8开关s28全部控制为接通状态,对第1蓄电组51-第8蓄电组58同时进行充电。此外,可以每2个地依次进行充电,也可以每4个地依次进行充电。同时,可充电的蓄电组的数量取决于电源系统的各部件的规格。
[0068]
另外,在充电器4是普通充电器的情况下,一般地,以单相100/200v的交流电力进行充电。在以交流进行充电的情况下,在耦合点n9与充电口p1之间的电流路径,插入ac/dc转换器(未图示)。ac/dc转换器将从充电器4输入的交流电力转换为直流电力,并向耦合点n9输出。
[0069]
图7是表示飞行体1的飞行中的电源系统的状态的一个例子的图。如上述那样在飞行体1前进的情况下,需要相比于第1马达21-第4马达24的转速更加提高第5马达25-第8马达28的转速。此外,在飞行体1向左前方前进的情况下,需要相比于第1马达21-第6马达26的
转速更加提高第7马达27-第8马达28的转速。
[0070]
图7表示飞行体1向左前方前进的情况下的电源系统的状态的一个例子。在飞行体1向左前方前进的情况下,需要提高第7马达27-第8马达28的转速,因此第7马达27-第8马达28的消耗电力比第1马达21-第6马达26的消耗电力大。也就是说,第7马达27-第8马达28的负载比第1马达21-第6马达26的负载大。该情况下,第7蓄电组57-第8蓄电组58的soc比第1蓄电组51-第6蓄电组56的soc更快降低。
[0071]
在图7所示的例子中,电源控制部70将消耗电力比第1马达21-第6马达26大的第7马达27-第8马达28所连结的第2电流路径中插入的第1.7开关s17-第1.8开关s18控制为接通状态,将第1马达21-第6马达26所连结的第2电流路径中插入的第1.1开关s11-第1.6开关s16维持为断开状态。由此,从预备蓄电组59仅向第7马达27-第8马达28提供辅助电流,第7蓄电组57-第8蓄电组58的soc的降低被缓和。
[0072]
以下,对消耗电力比其他大的马达所连结的第2电流路径中插入的第1开关的接通/断开控制具体进行说明。基本地,以下的处理在第1蓄电组51-第8蓄电组58的消耗电力的偏差超过规定值的状态下执行。
[0073]
电源控制部70基于从第1蓄电组51-第8蓄电组58接收的第1蓄电组51-第8蓄电组58的各电流值,确定电流值比其他大的至少一个蓄电组。电源控制部70对确定的蓄电组的超过电流值进行计算。在图7所示的例子中,电源控制部70对第7蓄电组57的超过电流值和第8蓄电组58的超过电流值进行合计,计算整体的超过电流值。电源控制部70确定dc/dc转换器60的电流指令值,以使得dc/dc转换器60的输出电流值为该超过电流值。电源控制部70将确定的电流指令值对dc/dc转换器60设定来使dc/dc转换器60运转,并且将第1.7开关s17-第1.8开关s18接通。若第1蓄电组51-第8蓄电组58的各电流值的偏差收敛于规定值以内,则电源控制部70使dc/dc转换器60停止,并且将第1.7开关s17-第1.8开关s18断开。
[0074]
此外,电源控制部70也可以如下述那样执行第1开关的接通/断开控制。电源控制部70从机体控制部40获取第1马达21-第8马达28的各转速。电源控制部70基于获取的各转速,确定转速比其他大的至少一个蓄电组。电源控制部70计算与确定的蓄电组的超过转速相应的超过电流值。在图7所示的例子中,电源控制部70对第7蓄电组57的超过电流值与第8蓄电组58的超过电流值进行合计,计算整体的超过电流值。以下,与上述的处理同样。
[0075]
此外,电源控制部70也可以如下述那样执行第1开关的接通/断开控制。电源控制部70基于从第1蓄电组51-第8蓄电组58接收的各电压值,确定电压值比其他小的至少一个蓄电组。电源控制部70确定dc/dc转换器60的电压指令值,以使得dc/dc转换器60的输出电压值比确定的蓄电组的电压值高。电源控制部70将确定的电压指令值对dc/dc转换器60设定来使dc/dc转换器60运转,并且将第1.7开关s17-第1.8开关s18接通。若第1蓄电组51-第8蓄电组58的电压值或者soc的偏差收敛于规定值以内,则电源控制部70使dc/dc转换器60停止,并且将第1.7开关s17-第1.8开关s18断开。
[0076]
图8-图10是用于对飞行体1停机中的第1蓄电组51-第8蓄电组58间的容量的均衡化处理的一个例子进行说明的图。在该例子中,假定飞行体1暂时停机于不存在充电器4的场所的状态。在飞行体1的暂时停机中,电源控制部70通过主动平衡方式来使第1蓄电组51-第8蓄电组58间的容量均衡化。
[0077]
例如电源控制部70对从第1蓄电组51-第8蓄电组58接收的第1蓄电组51-第8蓄电
组58的电压的平均值进行计算,将计算出的平均值设定为均衡化目标电压(以下,简称为目标电压)。
[0078]
电源控制部70使能量从电压比目标电压高的蓄电组(图8中为第1蓄电组51)向电压比目标电压低的蓄电组(图8中为第3蓄电组53)移动。首先,如图9所示,电源控制部70将第1.1开关s11以及第2.1开关s21控制为接通状态,从第1蓄电组51对预备蓄电组59进行充电,直到第1蓄电组51的电压降低至目标电压。在第1蓄电组51的电压比预备蓄电组59的电压低的情况下,电源控制部70对dc/dc转换器60进行控制,将第1蓄电组51的电压升压。
[0079]
接下来,如图10所示,电源控制部70将第1.3开关s13以及第2.3开关s23控制为接通状态,从预备蓄电组59对第3蓄电组53进行充电,以使得第3蓄电组53的电压上升至目标电压。在预备蓄电组59的电压比第3蓄电组53的电压低的情况下,电源控制部70控制dc/dc转换器60来将预备蓄电组59的电压升压。
[0080]
电源控制部70反复执行以上的处理,直到第1蓄电组51-第8蓄电组58的电压被全部均衡化。在以上的说明中,说明了使用电压作为均衡化目标值的例子,但也可以取代电压,使用soc、实际容量、可放电容量、或者可充电容量。
[0081]
电源控制部70即使在第1蓄电组51-第8蓄电组58之间没有实质的容量的偏差的情况下,在第1蓄电组51-第8蓄电组58的soc降低到设定值以下的情况下,也可以从预备蓄电组59对第1蓄电组51-第8蓄电组58进行充电。
[0082]
然而,可能在第1蓄电组51-第8蓄电组58的至少一个发生不良情况。若从发生了不良情况的蓄电组向对应的马达的电流提供停止,则飞行体1的姿态控制变得困难。对此,电源控制部70将与发生了不良情况的蓄电组连结的第1电流路径中插入的第2开关控制为断开状态,将与该蓄电组连结的第2电流路径中插入的第1开关控制为接通状态。由此,能够继续从预备蓄电组59向该马达的电流提供。也就是说,预备蓄电组59作为代替发生了不良情况的蓄电组的蓄电组而发挥功能。
[0083]
在本实施方式中,预备蓄电组59的额定输出被设计为与第1蓄电组51-第8蓄电组58的额定输出对应的值。如上述那样,由于预备蓄电组59有时被用作为第1蓄电组51-第8蓄电组58的至少一个的代替,因此需要具有与第1蓄电组51-第8蓄电组58同等的输出性能。
[0084]
预备蓄电组59的容量被设计为比第1蓄电组51-第8蓄电组58的容量少。从备用容量的确保以及缓冲区域的确保的观点出发,期望预备蓄电组59的容量较多。但是,若预备蓄电组59的容量变大,则预备蓄电组59变重,成为使飞行体1的电力利用率降低的重要因素。在本实施方式中,优先飞行体1的电力利用率,预备蓄电组59的容量被设计为比第1蓄电组51-第8蓄电组58的容量少。
[0085]
如以上说明那样,通过本实施方式,通过设计多个蓄电组51-58和预备蓄电组59,即使在飞行中任一蓄电组发生异常,通过将发生异常的蓄电组切换为预备蓄电组59,能够继续稳定的飞行。因此,能够提高飞行中的安全性,也有助于载人无人机的实用化。
[0086]
此外,通过将预备蓄电组59设置于机体的重心部分,能够将机体的重量在前后左右均匀化。由此,能够防止机体的姿态成为不安点。此外,能够防止负载偏向特定的马达,能够防止特定的蓄电组的soh比其他更快地降低。
[0087]
此外,如图1所示,在将预备蓄电组59设置于机体的中心部分的情况下,能够使分别连接预备蓄电组59与第1蓄电组51-第8蓄电组58之间的电力布线均匀并且最短化。通过
电力布线均匀化,布线电阻相等,因布线电阻引起的电压下降在第1蓄电组51-第8蓄电组58之间变得均匀。由此,第1蓄电组51-第8蓄电组58的电压测量的精度提高,每单位时间的均衡化的精度也提高。
[0088]
此外,如图3所示,即使在将预备蓄电组59设置于从机体的中心部分偏离的位置的情况下,也能够将预备蓄电组59与第1蓄电组51-第8蓄电组58之间连接以使得布线电阻相等,从而得到与上述同样的效果。
[0089]
此外,通过将搭载有电源系统的电气部件(继电器等)的基板配置于预备蓄电组59的附近,能够使预备蓄电组59与第1蓄电组51-第8蓄电组58之间的布线电阻更加严格地均匀化。此外,通过基板的重量,能够防止给机体平衡带来的恶劣影响。
[0090]
此外,通过在飞行中从预备蓄电组59向转速高的马达提供辅助电流,能够抑制第1蓄电组51-第8蓄电组58间的soc降低的偏差。由此,能够使第1蓄电组51-第8蓄电组58之间的充放电循环数均匀化,能够抑制第1蓄电组51-第8蓄电组58之间的soh降低的偏差。因此,能够使第1蓄电组51-第8蓄电组58之间的更换时期一致,也有助于蓄电组的运用成本的减少。
[0091]
此外,通过在飞行体1的暂时停机中,通过主动平衡方式来使第1蓄电组51-第8蓄电组58之间的容量均衡化,能够最大限度地有效利用第1蓄电组51-第8蓄电组58的容量。也就是说,能够抑制实际的飞行距离比通过第1蓄电组51-第8蓄电组58的全部容量本来能够飞行的可飞行距离短。此外,通过将预备蓄电组59有效利用为缓冲,能够有效地进行主动平衡方式的均衡化。由于能够将主动平衡方式的均衡化中剩余的容量向预备蓄电组59充电,因此能够不像被动平衡方式那样放弃剩余的容量而有效利用。
[0092]
在主动平衡方式的均衡化处理时,从soc高的蓄电组,经由dc/dc转换器60以及预备蓄电组59,向soc低的蓄电组进行充电。由此,即使不分别在第1蓄电组51-第8蓄电组58连接dc/dc转换器,也能够适当控制均衡化电流。在主动平衡方式的均衡化处理时,也能够抑制冲击电流从soc高的蓄电组流向soc低的蓄电组。因此,能够确保安全性,并且能够削减成本。
[0093]
此外,通过将第1蓄电组51-第8蓄电组58分别与连结预备蓄电组59的多个母线耦合,对多个母线的耦合点n9进行外部充电,能够使第1蓄电组51-第8蓄电组58的充电作业简单化。若对第1蓄电组51-第8蓄电组58分别进行外部充电,则发生8次插入充电线缆4a的作业,但在本实施方式中,一次作业就足够。此外,由于能够使预备蓄电组59作为充电时的平滑化容量而发挥功能,因此能够抑制充电开始时的冲击电流。
[0094]
以上,基于实施方式对本公开进行了说明。实施方式是例示,本领域技术人员能够理解,能够对其各结构要素、各处理工序的组合进行各种变形例、此外这些变形例也处于本公开的范围。
[0095]
例如,第1蓄电组51-第8蓄电组58也可以构成为从机体可装卸。该情况下,能够将蓄电组从机体取下并充电。此外,也能够与充电结束的相同种类的蓄电组进行更换。该情况下,能够节约充电时间。
[0096]
此外,在上述的实施方式中,说明了将预备蓄电组59设置于飞行体1的重心部分的例子。关于这一点,为了在飞行体1的左右中心线l1上,将重心位置在前后方向调整,也能够使用预备蓄电组59。例如,为了将未设置预备蓄电组59的状态的重心位置向前方偏移,也可
以在比未设置预备蓄电组59的状态的重心位置更靠前方的位置设置预备蓄电组59。同样地,为了将未设置预备蓄电组59的状态的重心位置向后方偏移,也可以在比未设置预备蓄电组59的状态的重心位置更靠后方的位置设置预备蓄电组59。
[0097]
此外,在上述的实施方式中,说明了具有8个螺旋桨11-18的飞行体1。关于这一点,螺旋桨的数量并不限定于8个。例如,螺旋桨的数量可以是4个,可以是6个,也可以是12个。
[0098]
另外,实施方式也可以通过以下的项目而确定。
[0099]
[项目1]
[0100]
一种飞行体(1),具备主体部(2)和从所述主体部(2)左右对称地配置为放射状的多个螺旋桨(11-18),所述飞行体(1)的特征在于,具备:
[0101]
多个马达(21-28),使所述多个螺旋桨(11-18)分别旋转;
[0102]
多个蓄电组(51-58),分别向所述多个马达(21-28)提供电流;和
[0103]
预备蓄电组(59),分别通过电力布线(h11-h18)而与所述多个蓄电组(51-58)连接,
[0104]
所述多个马达(21-28)在左右各设置相同数量,所述多个蓄电组(51-58)在左右各设置相同数量,
[0105]
所述预备蓄电组(59)被设置于所述主体部(2)的左右的中心线上。
[0106]
由此,能够抑制对机体平衡的影响,并且将多个蓄电组(51-58)的容量有效利用。
[0107]
[项目2]
[0108]
在项目1所述的飞行体(1)中,其特征在于,所述预备蓄电组(59)被设置于所述飞行体(1)的重心部分。
[0109]
由此,能够抑制预备蓄电组(59)的设置所导致的对机体平衡的不良影响。
[0110]
[项目3]
[0111]
在项目1或者2所述的飞行体(1)中,其特征在于,所述预备蓄电组(59)与所述多个蓄电组(51-58)之间分别通过电力布线(h11-h18)而连接,以使得所述预备蓄电组(59)与所述多个蓄电组(51-58)之间的各个布线电阻相等。
[0112]
由此,能够提高多个蓄电组(51-58)的电压测量的精度。
[0113]
[项目4]
[0114]
在项目1至3的任一项所述的飞行体(1)中,其特征在于,所述多个蓄电组(51-58)在所述主体部(2)的左右距所述中心线等距离地分散配置,
[0115]
将所述预备蓄电组(59)与所述多个蓄电组(51-58)之间分别连接的电力布线(h11-h18)被设定为相等长度。
[0116]
由此,能够抑制对机体平衡的影响,并且使电力布线(h11-h18)的布线电阻一致。
[0117]
[项目5]
[0118]
在项目1至4的任一项所述的飞行体(1)中,其特征在于,所述预备蓄电组(59)的容量比所述多个蓄电组(51-58)的容量少。
[0119]
由此,能够抑制飞行体(1)的重量增加,能够抑制飞行体(1)的电力利用率的降低。
[0120]-符号说明-[0121]
1飞行体,2主体部,11-18螺旋桨,21-28马达,a1-a4臂,x1-x4支轴,h1-h8,h11-h18线束,31-38马达驱动部,40机体控制部,41传感器,51-58蓄电组,59预备蓄电组,511蓄电模
块,e1-en单元,rs分流电阻,t1温度传感器,512控制基板,513电压测量部,514温度测量部,515电流测量部,516管理部,60dc/dc转换器,70电源控制部,71通信线,s11-s18第1开关,s21-s28第2开关,p1充电口,4充电器,4a充电线缆,5商用电力系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1