一种大型水陆两栖飞机的高速保护控制方法与流程
本发明涉及但不限于飞行控制,尤指一种大型水陆两栖飞机的高速保护控制方法。
背景技术:
1、大型水陆两栖飞机外形设计时考虑其在水上进行起降,通常将飞机下部设计为船体,且主机翼两侧装有浮筒,该类型飞机飞行阻力受姿态影响极大。另外,为减轻着水载荷,水陆两栖飞机设计时尽可能降低飞机重量,因此不配备可动水平安定面,飞机的配平和机动均依靠升降舵实现。
2、现有高速保护控制方法为将高速保护指令转换为法向过载指令使飞机抬头减速,高速保护工作过程中可能会出现飞机俯仰角过大的情况,并且在退出高速保护后飞机仍以较大俯仰角飞行。对于无可动水平安定面的水陆两栖飞机而言,阻力明显大于其他飞机,因此飞机以较大俯仰角飞行时,速度减小极快,在飞行员短暂失能的情况下,飞机速度有可能降至失速速度,极有可能危及飞行安全。
技术实现思路
1、本发明的目的:为了解决上述技术问题,本发明实施例提供了一种大型水陆两栖飞机的高速保护控制方法,以解决采用现有高速保护控制方式在执行高速保护工作过程中可能会出现飞机俯仰角过大情况,并且在退出高速保护后飞机仍以较大俯仰角飞行,对于大型水陆两栖并不适用以及有可能危及飞行安全的问题。
2、本发明的技术方案:本发明实施例提供一种大型水陆两栖飞机的高速保护控制方法,包括:
3、在飞机进入高速保护状态后,根据飞机当前俯仰角生成高速保护俯仰角稳定指令,所述高速保护俯仰角稳定指令与基于飞行员驾驶意图生成的高速保护俯仰角指令叠加后生成高速保护俯仰角控制指令,将高速保护俯仰角控制指令转化为高速保护过载指令后,与飞机主飞行控制律指令进行叠加处理,从而实现安全、高效、平稳的高速保护控制作用。
4、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,包括:
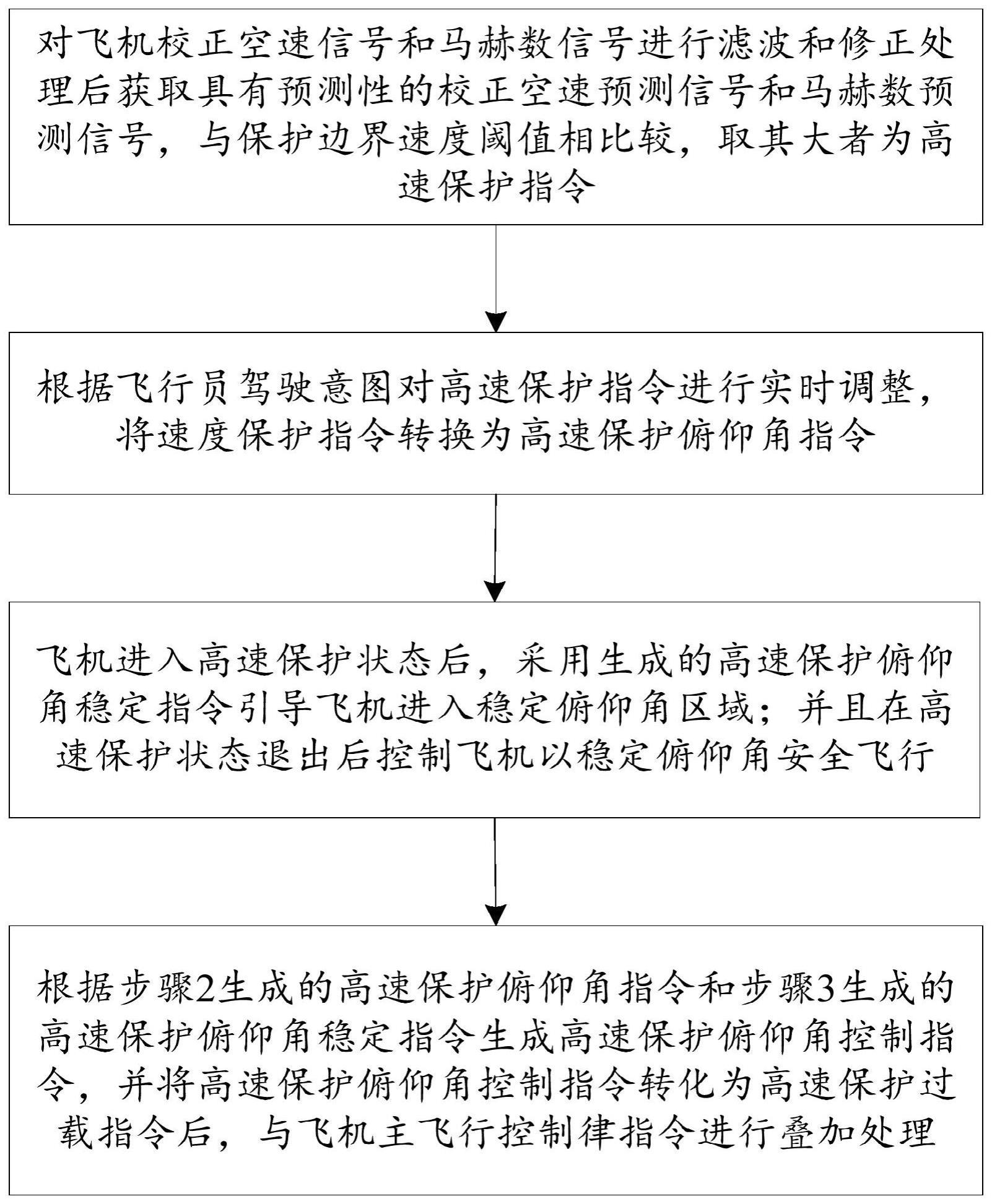
5、步骤1,对飞机校正空速信号和马赫数信号进行滤波和修正处理后获取具有预测性的校正空速预测信号和马赫数预测信号,与保护边界速度阈值相比较,取其大者为高速保护指令;
6、步骤2,根据飞行员驾驶意图对高速保护指令进行实时调整,将速度保护指令转换为高速保护俯仰角指令;
7、步骤3,飞机进入高速保护状态后,采用生成的高速保护俯仰角稳定指令引导飞机进入稳定俯仰角区域;并且在高速保护状态退出后控制飞机以稳定俯仰角安全飞行;
8、步骤4,根据步骤2生成的高速保护俯仰角指令和步骤3生成的高速保护俯仰角稳定指令生成高速保护俯仰角控制指令,并将高速保护俯仰角控制指令转化为高速保护过载指令后,与飞机主飞行控制律指令进行叠加处理。
9、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,所述步骤1包括:
10、步骤11,基于飞机大气数据计算机获取校正空速信号与马赫数信号,并通过高通滤波器滤波获得校正空速变化率信号和马赫数变化率信号;
11、步骤12,将校正空速变化率信号和马赫数变化率信号一一对应的与校正空速信号和马赫数信号叠加后,经过低通滤波器滤除高频噪声获得具有预测特性的校正空速预测信号和马赫数预测信号;
12、步骤13,将具有预测特性的校正空速信号和马赫数信号一一对应的与校正空速保护边界阈值和马赫数保护边界阈值进行做差,并对差值通过单边限幅处理,取其大者为高速保护指令。
13、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,所述步骤13中对差值通过单边限幅处理,包括:
14、当校正空速差值或马赫数差值为正值时,单边限幅处理后输出原校正空速差值或马赫数差值;
15、当校正空速差值或马赫数差值为负值或0时,单边限幅处理后输出0。
16、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,所述步骤2包括:
17、依据驾驶杆位移对高速保护指令进行动态参数调整处理,生成高速保护俯仰角指令,并且随着推杆量增大逐渐增大高速保护俯仰角指令;拉杆或驾驶杆在中立位时,高速保护俯仰角指令保持在驾驶杆中立位的指令值。
18、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,所述步骤3包括:
19、飞机进入高速保护状态后,根据飞机当前俯仰角生成高速保护俯仰角稳定指令,通过所述高速保护俯仰角稳定指令柔和引导飞机俯仰姿态进入稳定俯仰角区域;并且在高速保护状态退出后控制飞机以稳定俯仰角安全飞行。
20、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,所述步骤4包括:
21、步骤41,高速保护俯仰角指令与高速保护俯仰角稳定指令叠加后与俯仰角进行做差,并对俯仰角差值进行低通滤波处理生成高速保护俯仰角控制指令;
22、步骤42,将高速保护俯仰角控制指令通过增益转化为高速保护过载指令,高速保护过载指令与飞机主控制律指令处进行叠加。
23、可选地,如上所述的大型水陆两栖飞机的高速保护控制方法中,还包括:
24、判断飞机进入或退出高速保护状态,包括:
25、通过分别对校正空速信号和马赫数信号进行速度滞环,通过处理逻辑得到速度保护启动标和马赫数保护启动标,并且根据对速度保护启动标和马赫数保护启动标进行逻辑判断得到高速保护启动标,从而根据高速保护启动标确定进入或退出高速保护状态。
26、本发明的有益效果:本发明实施例提供一种大型水陆两栖飞机的高速保护控制方法,在飞机进入高速保护状态后,根据飞机当前俯仰角生成高速保护俯仰角稳定指令,通过将该高速保护俯仰角稳定指令与基于飞行员驾驶意图生成的高速保护俯仰角指令叠加后生成高速保护俯仰角控制指令,并通过将高速保护俯仰角控制指令转化为高速保护过载指令后,与飞机主飞行控制律指令进行叠加处理,从而实现安全、高效、平稳的高速保护控制作用。采用本发明实施例提供的技术方案,可以实现飞行员通过驾驶杆指令速度,增强速度感知。根据驾驶员驾驶意图动态调整高速保护指令和柔和俯仰角稳定区域引导控制保证该高速保护控制方法提供安全,平滑,有效的大型水陆两栖飞机高速保护功能。
27、另外,采用本发明实施例提供的技术方案,在高速保护过程中不仅对速度进行控制,同时对飞机俯仰角进行控制,在飞行员操纵时,实现驾驶杆指令速度大幅降低飞行员负担,可在驾驶员不进行操纵时,自动控制飞机稳定飞行,相较于传统高速保护控制,有效提升安全性。
技术特征:
1.一种大型水陆两栖飞机的高速保护控制方法,其特征在于,包括:
2.根据权利要求1所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,包括:
3.根据权利要求2所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,所述步骤1包括:
4.根据权利要求3所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,所述步骤13中对差值通过单边限幅处理,包括:
5.根据权利要求3所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,所述步骤2包括:
6.根据权利要求5所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,所述步骤3包括:
7.根据权利要求6所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,所述步骤4包括:
8.根据权利要求1~7中任一项所述的大型水陆两栖飞机的高速保护控制方法,其特征在于,还包括:
技术总结
本发明实施例公开了一种大型水陆两栖飞机的高速保护控制方法,包括:在飞机进入高速保护状态后,根据飞机当前俯仰角生成高速保护俯仰角稳定指令,所述高速保护俯仰角稳定指令与基于飞行员驾驶意图生成的高速保护俯仰角指令叠加后生成高速保护俯仰角控制指令,将高速保护俯仰角控制指令转化为高速保护过载指令后,与飞机主飞行控制律指令进行叠加处理,从而实现安全、高效、平稳的高速保护控制作用。本发明实施例提供的技术方案解决了采用现有高速保护控制方式在执行高速保护工作过程中可能会出现飞机俯仰角过大情况,并且在退出高速保护后飞机仍以较大俯仰角飞行,对于大型水陆两栖并不适用以及有可能危及飞行安全的问题。
技术研发人员:孟杨,牛尔卓,王敏文,卢正人
受保护的技术使用者:中国航空工业集团公司西安飞行自动控制研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!