一种旋翼工作状态检测方法、旋翼型飞行器及存储介质与流程
本发明涉及飞行器状态检测,具体涉及一种旋翼工作状态检测方法、旋翼型飞行器及存储介质。
背景技术:
1、目前,多旋翼飞行器的飞行场景日益增加,使用环境也越来越复杂,从而对其安全性提出了更高的要求。现有多旋翼飞行器一般通过动力冗余提高安全性,但当发生旋翼本身断裂时,仅依靠动力冗余并不能保证多旋翼飞行器的安全,亟需一种旋翼工作状态检测方案,以及时发现旋翼断裂的情况,才能针对性地调整多旋翼飞行器的动力,提升其安全性。
2、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提供一种旋翼工作状态检测方法、旋翼型飞行器及存储介质,以解决目前仅依靠动力冗余并不能保证多旋翼飞行器的安全的技术问题。
2、本发明解决上述技术问题所采用的技术方案如下:
3、根据本发明实施例的一个方面,提供一种旋翼工作状态检测方法,该方法包括:
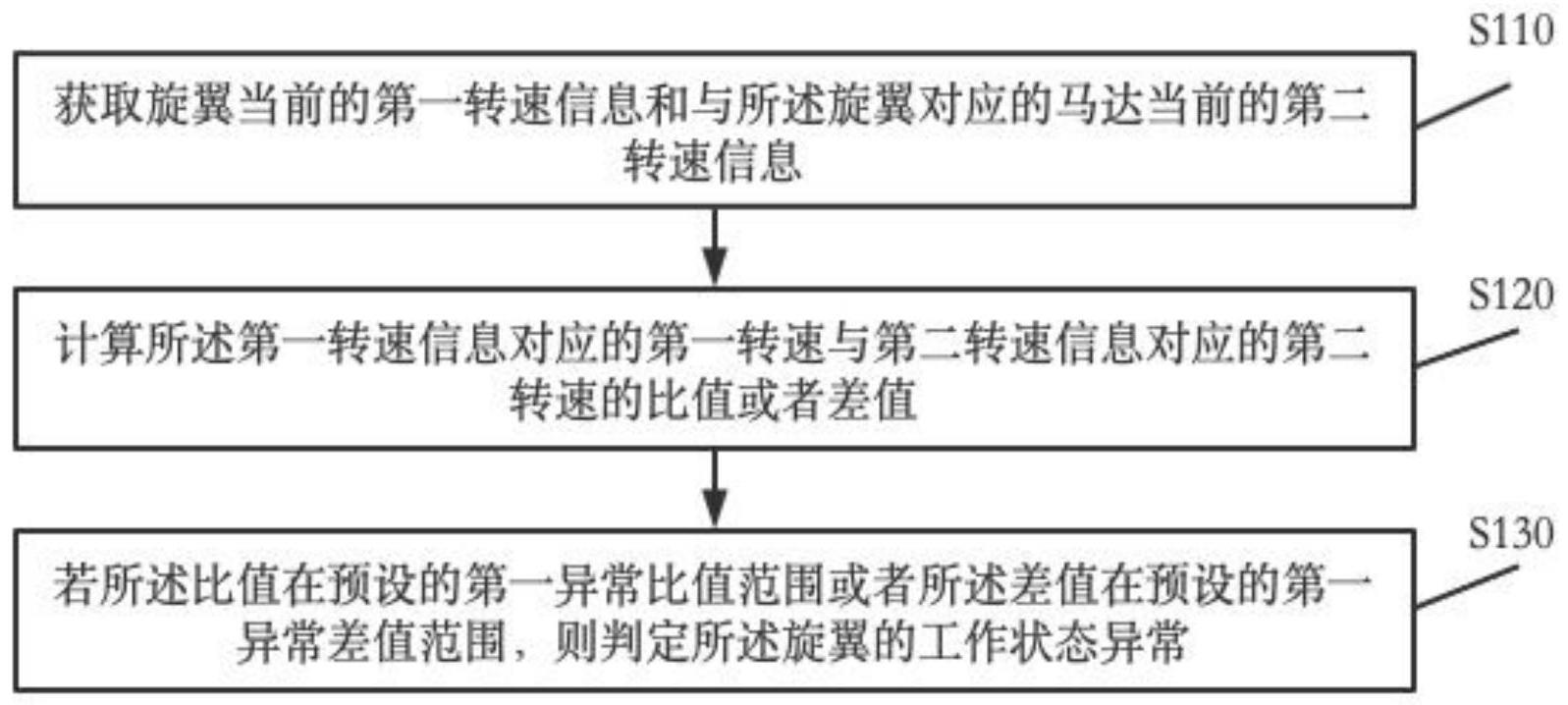
4、获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息;
5、计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值;
6、若所述比值在预设的第一异常比值范围或者所述差值在预设的第一异常差值范围,则判定所述旋翼的工作状态异常。
7、可选地,在所述计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值之后,所述方法还包括:
8、若所述比值不在预设的第一异常比值范围或者所述差值不在预设的第一异常差值范围,则返回执行获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息的步骤。
9、可选地,在判定所述旋翼的工作状态异常之后,还包括:上报工作状态异常的所述旋翼对应的位置信息。
10、可选地,所述获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息包括:
11、实时获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息;或者,周期性地获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息。
12、可选地,所述获取旋翼的第一转速信息包括:通过转速传感器获取旋翼的第一转速信息。
13、可选地,获取所述旋翼对应的马达的第二转速信息包括:从所述旋翼对应的马达的驱动单元获取第二转速信息。
14、可选地,在所述方法之前,还包括:
15、获取所述旋翼对应的马达当前的第二转速信息,若所述第二转速信息对应的第二转速在第一预设转速范围,则执行获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息的步骤。
16、可选地,在所述计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值之后,所述方法还包括:
17、若所述比值不在预设的第一异常比值范围或者所述差值不在预设的第一异常差值范围,且所述第二转速在第二预设转速范围,则结束旋翼工作状态检测流程。
18、根据本发明实施例的另一个方面,提供一种旋翼型飞行器,该旋翼型飞行器包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述旋翼工作状态检测方法的步骤。
19、根据本发明实施例的又一个方面,提供一种计算机可读存储介质,该计算机可读存储介质上存储有旋翼工作状态检测程序,所述旋翼工作状态检测程序被处理器执行时实现上述旋翼工作状态检测方法的步骤。
20、本发明实施例提供的旋翼工作状态检测方法、飞行器及存储介质中,获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息;计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值;若所述比值在预设的第一异常比值范围或者所述差值在预设的第一异常差值范围,则判定所述旋翼的工作状态异常。由于在旋翼断裂时,其转速必然跟与其对应的马达的转速有较大差异,所以,该技术方案通过获取并判断当前的旋翼的第一转速跟与其对应的马达的第二转速的比值或者差值是否异常,能够有效地检测旋翼本身是否断裂,为针对性地调整多旋翼飞行器的动力提供基础,从而提升旋翼型飞行器的安全性。
技术特征:
1.一种旋翼工作状态检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,在所述计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值之后,所述方法还包括:
3.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,在判定所述旋翼的工作状态异常之后,还包括:上报工作状态异常的所述旋翼对应的位置信息。
4.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,所述获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息包括:
5.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,所述获取旋翼的第一转速信息包括:通过转速传感器获取旋翼的第一转速信息。
6.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,获取所述旋翼对应的马达的第二转速信息包括:从所述旋翼对应的马达的驱动单元获取第二转速信息。
7.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,在所述方法之前,还包括:
8.根据权利要求1所述的旋翼工作状态检测方法,其特征在于,在所述计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值之后,所述方法还包括:
9.一种旋翼型飞行器,其特征在于,所述旋翼型飞行器包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8中任一项所述旋翼工作状态检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有旋翼工作状态检测程序,所述旋翼工作状态检测程序被处理器执行时实现如权利要求1至8中任一项所述的旋翼工作状态检测方法的步骤。
技术总结
本发明公开了一种旋翼工作状态检测方法、旋翼型飞行器及存储介质,属于飞行器状态检测技术领域,其中,该旋翼工作状态检测方法包括:获取旋翼当前的第一转速信息和与所述旋翼对应的马达当前的第二转速信息;计算所述第一转速信息对应的第一转速与第二转速信息对应的第二转速的比值或者差值;若所述比值在预设的第一异常比值范围或者所述差值在预设的第一异常差值范围,则判定所述旋翼的工作状态异常。由于在旋翼断裂时,其转速必然跟与其对应的马达的转速有较大差异,所以,该技术方案通过获取并判断当前的旋翼的第一转速跟与其对应的马达的第二转速的比值或者差值是否异常,能够有效地检测旋翼本身是否断裂,从而提升旋翼型飞行器的安全性。
技术研发人员:胡华智,丁凯,苏卫朋
受保护的技术使用者:亿航智能设备(广州)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!