高空作业辅助飞行器的制作方法
1.本实用新型涉及飞行器技术领域,具体涉及一种气球飞行装置。
背景技术:
2.在飞行器领域中,气球的应用逐渐走进人们的视线中,气球可用于载人飞行,让人实现了和天空的零距离接触。气球在应用中,由于无法实现灵活的可控性能,操作不当往往会导致财产与人员的安全受到损害,例如:在利用载人气球打松塔的作业中,往往会因为气球的不可控性导致危险的事故发生。
技术实现要素:
3.本实用新型所要解决的技术问题是:针对上述问题,提供一种操控效果好的高空作业辅助飞行器。
4.本实用新型的技术解决方案是:高空作业辅助飞行器,包括气球体、吊篮和飞行控制装置,吊篮通过绳索与气球体连接,飞行控制装置包括螺旋桨和安装在吊篮上用于控制螺旋桨工作的控制器,所述螺旋桨通过电机架固定,电机架固定在吊篮上方与气球体连接的绳索上,螺旋桨的电机固定在电机架上,电机架上还设有回转轴和控制回转轴转动的回转电机,回转轴的两端通过轴座可转动地固定在电机架上,回转轴靠近两端的位置分别设有姿态控制螺旋桨,回转电机的输出端与回转轴的一端连接控制其转动,螺旋桨的电机和回转电机分别与控制器电连接。
5.本实用新型的技术效果是:具有操作简单、稳定性强、操控效果好、可靠性高的优点,具有非常高的飞行安全系数。通过各螺旋桨叶差速原理,可在上、下、左、右、前或后各方位实现万向飞行,从而实现对气球空间位置的精准控制。可实现对高空的设备安装测量,林业林木的病虫害的防治,打药,果实采摘,林木剪枝作业。可广泛应用于小型载人飞艇、载人热气球、载人氦气球或载人氢气球等的辅助飞行控制。
附图说明
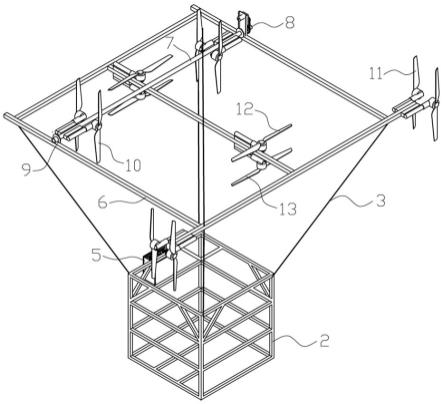
6.图1为本实用新型的结构示意图;
7.图2为本实用新型吊篮和飞行控制装置部分的结构示意图。
具体实施方式
8.如图1和2所示,高空作业辅助飞行器,包括气球体1、吊篮2和飞行控制装置,吊篮2通过绳索3与气球体1连接,飞行控制装置包括螺旋桨4和安装在吊篮2上用于控制螺旋桨4工作的控制器5,所述螺旋桨4通过电机架6固定,电机架6固定在吊篮2上方与气球体1连接的绳索3上,螺旋桨4的电机固定在电机架6上,电机架6上还设有回转轴7和控制回转轴7转动的回转电机8,回转轴7的两端通过轴座9可转动地固定在电机架6上,回转轴7靠近两端的位置分别设有姿态控制螺旋桨10,回转电机8的输出端与回转轴7的一端连接控制其转动,
螺旋桨4的电机和回转电机8分别与控制器5电连接。回转电机8可通过减速器控制回转轴7的转速。
9.所述姿态控制螺旋桨10为两组,分别固定在回转轴7靠近两端的位置,每组由两个相背向设置的螺旋桨4构成。
10.所述螺旋桨4中包括平飞螺旋桨11,用于控制飞行器的前进和转向。平飞螺旋桨11为两组,每组设有一个或两个相背的螺旋桨4,通过控制平飞螺旋桨11的转动可以实现飞行器的前进和向左或右转向飞行。平飞螺旋桨11可设置在电机架6的外围,有利于增大转弯力矩。
11.所述螺旋桨4中包括上升螺旋桨12和下降螺旋桨13,用于控制飞行器的上升和下降。通过控制上升螺旋桨12和下降螺旋桨13的转动可以实现飞行器的上升和下降飞行。
12.所述上升螺旋桨12和下降螺旋桨13各有两个,分别对称固定在电机架6上。上升螺旋桨12和下降螺旋桨13两两相背向设置并以中心对称的方式固定在电机架6上。
13.所述电机架6为矩形,将其与气球体1和吊篮2连接在一起的绳索3分别固定在电机架6的四个角上。
14.本设计的飞行器可完成动作有上升、下降、前进、后退、左转、右转、强力上升、强力下降、强力前进。由平飞螺旋桨电机完成前进、前进左转、前进右转的动作。由升降螺旋桨中的两个电机完成下降动作。由升降螺旋桨中的另两个电机完成上升动作。由四个姿态控制螺旋桨中的电机完成后退、后退左转、后退右转的动作。由回转电机控制回转轴转动,可改变四个姿态控制螺旋桨电机的推进方向,即可完成对上升的动力加强(强力上升)、对下降的动力加强(强力下降)和对前进的动力加强(强力前进)。
技术特征:
1.高空作业辅助飞行器,包括气球体(1)、吊篮(2)和飞行控制装置,吊篮(2)通过绳索(3)与气球体(1)连接,飞行控制装置包括螺旋桨(4)和安装在吊篮(2)上用于控制螺旋桨(4)工作的控制器(5),其特征在于,所述螺旋桨(4)通过电机架(6)固定,电机架(6)固定在吊篮(2)上方与气球体(1)连接的绳索(3)上,螺旋桨(4)的电机固定在电机架(6)上,电机架(6)上还设有回转轴(7)和控制回转轴(7)转动的回转电机(8),回转轴(7)的两端通过轴座(9)可转动地固定在电机架(6)上,回转轴(7)靠近两端的位置分别设有姿态控制螺旋桨(10),回转电机(8)的输出端与回转轴(7)的一端连接控制其转动,螺旋桨(4)的电机和回转电机(8)分别与控制器(5)电连接。2.如权利要求1所述的高空作业辅助飞行器,其特征在于,所述姿态控制螺旋桨(10)为两组,分别固定在回转轴(7)靠近两端的位置,每组由两个相背向设置的螺旋桨(4)构成。3.如权利要求1所述的高空作业辅助飞行器,其特征在于,所述螺旋桨(4)中包括平飞螺旋桨(11),用于控制飞行器的前进和转向。4.如权利要求1所述的高空作业辅助飞行器,其特征在于,所述螺旋桨(4)中包括上升螺旋桨(12)和下降螺旋桨(13),用于控制飞行器的上升和下降。5.如权利要求4所述的高空作业辅助飞行器,其特征在于,所述上升螺旋桨(12)和下降螺旋桨(13)各有两个,分别对称固定在电机架(6)上。6.如权利要求1所述的高空作业辅助飞行器,其特征在于,所述电机架(6)为矩形,将其与气球体(1)和吊篮(2)连接在一起的绳索(3)分别固定在电机架(6)的四个角上。
技术总结
高空作业辅助飞行器涉及一种气球飞行装置。螺旋桨(4)通过电机架(6)固定,电机架(6)固定在吊篮(2)上方与气球体(1)连接的绳索(3)上,螺旋桨(4)的电机固定在电机架(6)上,电机架(6)上还设有回转轴(7)和控制回转轴(7)转动的回转电机(8),回转轴(7)的两端通过轴座(9)可转动地固定在电机架(6)上,回转轴(7)靠近两端的位置分别设有姿态控制螺旋桨(10),回转电机(8)的输出端与回转轴(7)的一端连接控制其转动,螺旋桨(4)的电机和回转电机(8)分别与控制器(5)电连接。具有操作简单、稳定性强、操控效果好、可靠性高的优点,具有非常高的飞行安全系数。全系数。全系数。
技术研发人员:赵永清 左世江 赵芷怡
受保护的技术使用者:赵永清
技术研发日:2022.06.28
技术公布日:2022/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1