一种陆空两栖微型无人机的制作方法
1.本实用新型涉及无人机技术领域,尤其涉及一种陆空两栖微型无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。传统的四旋翼无人机的运动模式单一,仅仅局限于空中飞行,空中飞行耗电量大,使得续航时间大大减少,在一些实际应用场景中,需要无人机兼具陆地行驶功能。cn202220113462.4公开了一种可变形陆空两栖无人机,其通过四个机臂与机体铰接,通过对机臂进行折叠时间无人机陆空两种工作模式的切换,但是该两栖无人机行驶模式切换时仍然需要人为的对机臂进行折叠,无法实现自动切换,陆空行驶切换十分不便。
技术实现要素:
3.本实用新型的目的是提供一种陆空两栖微型无人机,解决上述背景技术提到的技术问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:
5.本实用新型一种陆空两栖微型无人机,包括机身,所述机身的四个边角处设置有连接臂,各所述连接臂的内部为空心结构,各所述连接臂的上部中间设置有驱动马达,各所述驱动马达的驱动轴延伸至所述连接臂内并且自由端设置有第一伞齿轮,各所述连接臂的内部在所述驱动马达的下方对称的固定设置有两个隔板,两个所述隔板上分别可转动的设置有一个从动轴,各所述从动轴位于两个所述隔板之间的一端分别设置有与所述第一伞齿轮相适配的第二伞齿轮,各所述从动轴的另一端分别通过电磁离合器与第一传动轴和第二传动轴的一端相连接;所述第一传动轴的另一端靠近所述机身并且与可转动的设置于所述连接臂下方的走轮传动连接;所述第二传动轴的另一端靠近所述连接臂的自由端并且与可转动的设置于所述连接臂上方的桨叶传动连接。
6.进一步的,各所述连接臂靠近所述机身的一端的外部固定设置有连接头,所述机身在与各所述连接头相对应的位置分别设置有连接耳,各所述连接头和对应的所述连接耳通过螺栓相连接。一步的,各所述连接臂的底部在靠近所述机身的部位设置有传动腔,并且所述传动腔与所述连接臂的内部相连通;所述第一连接轴在位于所述传动腔正上方的位置设置有第一直齿轮,所述传动腔的上部可转动的设置有与所述第一直齿轮相啮合的第二直齿轮,所述传动腔在所述第二直齿轮的下方可转动的设置有水平的轮轴,所述轮轴位于所述传动腔内部的部位设置有与所述第二直齿轮相啮合的第三直齿轮,所述走轮设置于所述轮轴位于所述传动腔外部的一端。
7.进一步的,各所述连接臂的自由端的上部可转动的设置有竖直的叶桨轴,所述叶桨设置于所述叶桨轴的上端,所述叶桨轴的下端延伸至所述连接臂的内部并设置有第三伞齿轮,所述第二传动轴靠近所述叶桨轴的部位设置有与所述第三伞齿轮相适配的第四伞齿
轮。
8.与现有技术相比,本实用新型的有益技术效果:
9.本实用新型通过两个从动轴分别通过电磁离合器连接第一传动轴和第二传动轴,通过两个电磁离合器的离、合切换使单个连接臂上的驱动马达可以在不同模式下分别单独驱动第一传动轴或第二传动轴旋转,进而实现无人机陆地行驶和空中飞行两种工作模式的自动切换,无需人为的对无人机结构进行调整,陆空行驶切换方便快捷。
附图说明
10.下面结合附图说明对本实用新型作进一步说明。
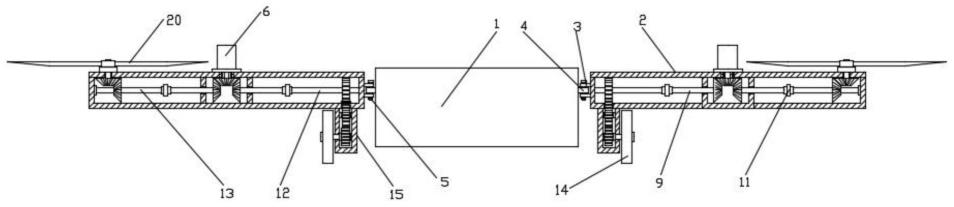
11.图1为本实用新型结构示意图;
12.图2为单个连接臂的剖视结构图;
13.附图标记说明:1、机身;2、连接臂;3、连接头;4、连接耳;5、螺栓; 6、驱动马达;7、第一伞齿轮;8、隔板;9、从动轴;10、第二伞齿轮;11、电磁离合器;12、第一传动轴;13、第二传动轴;14、走轮;15、传动腔;16、第一直齿轮;17、第二直齿轮;18、轮轴;19、第三直齿轮;20、桨叶;21、叶桨轴;22、第三伞齿轮;23、第四伞齿轮
具体实施方式
14.如图1-图2所示,一种陆空两栖微型无人机,包括机身1,所述机身1的四个边角处安装有连接臂2。具体的各所述连接臂2靠近所述机身1的一端的外部固定设置有连接头3,所述机身1在与各所述连接头3相对应的位置分别固定设置有连接耳4,各所述连接头3和对应的所述连接耳4通过螺栓5相连接。
15.各所述连接臂2的内部为空心结构,各所述连接臂2的上部中间安装有驱动马达6,各所述驱动马达6的驱动轴竖直地延伸至所述连接臂2内并且自由端安装有第一伞齿轮7。各所述连接臂2的内部在所述驱动马达6的下方对称的固定设置有两个竖直的隔板8,两个所述隔板8上分别可转动的安装有一个从动轴 9。各所述从动轴9位于两个所述隔板8之间的一端分别安装有与所述第一伞齿轮7相适配的第二伞齿轮10,各所述从动轴9的另一端分别通过电磁离合器11 与第一传动轴12和第二传动轴13的一端相连接。
16.所述第一传动轴12的另一端靠近所述机身1并且与可转动的设置于所述连接臂2下方的走轮14传动连接,具体的:各所述连接臂2的底部在靠近所述机身1的部位设置有传动腔15,并且所述传动腔15与所述连接臂2的内部相连通。所述第一连接轴12在位于所述传动腔15正上方的位置安装有第一直齿轮16,所述传动腔15的上部可转动的安装有与所述第一直齿轮16相啮合的第二直齿轮17。所述传动腔15在所述第二直齿轮17的下方可转动的安装有水平的轮轴 18,所述轮轴18位于所述传动腔15内部的部位安装有与所述第二直齿轮17相啮合的第三直齿轮19,所述走轮14安装于所述轮轴18位于所述传动腔15外部的一端。
17.所述第二传动轴13的另一端靠近所述连接臂2的自由端并且与可转动的安装于所述连接臂2上方的桨叶20传动连接,具体的:各所述连接臂2的自由端的上部可转动的安装有竖直的叶桨轴21,所述叶桨20固定安装于所述叶桨轴 21的上端。所述叶桨轴21的下端延伸至所述连接臂2的内部并安装有第三伞齿轮22,所述第二传动轴13靠近所述叶桨轴21的部位安装有与所述第三伞齿轮 22相适配的第四伞齿轮23。
18.本实用新型在工作远离为:两个从动轴分别通过电磁离合器连接第一传动轴和第二传动轴,当无人机需要空中飞行时,第一传动轴和对应的从动轴之间的电磁离合器处于分离状态,第二传动轴和对应的从动轴之间的电磁离合器处于连接状态,此时驱动马达只驱动第二传动轴旋转,再通过第二传动轴使连接臂端部的桨叶旋转,实现无人机的飞行。当无人机落地后需要进行陆地行驶时,第一传动轴和对应的从动轴之间的离合器处于连接状态,第二传动轴和对应的从动轴之间的电磁离合器处于分离状态,这时驱动马达只驱动第一传动轴旋转,再通过第一传动轴使对应的走轮旋转,实现无人机在陆地上的行走。
19.以上所述的实施例仅是对本实用新型的优选方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
技术特征:
1.一种陆空两栖微型无人机,其特征在于:包括机身,所述机身的四个边角处设置有连接臂,各所述连接臂的内部为空心结构,各所述连接臂的上部中间设置有驱动马达,各所述驱动马达的驱动轴延伸至所述连接臂内并且自由端设置有第一伞齿轮,各所述连接臂的内部在所述驱动马达的下方对称的固定设置有两个隔板,两个所述隔板上分别可转动的设置有一个从动轴,各所述从动轴位于两个所述隔板之间的一端分别设置有与所述第一伞齿轮相适配的第二伞齿轮,各所述从动轴的另一端分别通过电磁离合器与第一传动轴和第二传动轴的一端相连接;所述第一传动轴的另一端靠近所述机身并且与可转动的设置于所述连接臂下方的走轮传动连接;所述第二传动轴的另一端靠近所述连接臂的自由端并且与可转动的设置于所述连接臂上方的桨叶传动连接。2.根据权利要求1所述的陆空两栖微型无人机,其特征在于:各所述连接臂靠近所述机身的一端的外部固定设置有连接头,所述机身在与各所述连接头相对应的位置分别设置有连接耳,各所述连接头和对应的所述连接耳通过螺栓相连接。3.根据权利要求1所述的陆空两栖微型无人机,其特征在于:各所述连接臂的底部在靠近所述机身的部位设置有传动腔,并且所述传动腔与所述连接臂的内部相连通;所述第一连接轴在位于所述传动腔正上方的位置设置有第一直齿轮,所述传动腔的上部可转动的设置有与所述第一直齿轮相啮合的第二直齿轮,所述传动腔在所述第二直齿轮的下方可转动的设置有水平的轮轴,所述轮轴位于所述传动腔内部的部位设置有与所述第二直齿轮相啮合的第三直齿轮,所述走轮设置于所述轮轴位于所述传动腔外部的一端。4.根据权利要求1所述的陆空两栖微型无人机,其特征在于:各所述连接臂的自由端的上部可转动的设置有竖直的叶桨轴,所述叶桨设置于所述叶桨轴的上端,所述叶桨轴的下端延伸至所述连接臂的内部并设置有第三伞齿轮,所述第二传动轴靠近所述叶桨轴的部位设置有与所述第三伞齿轮相适配的第四伞齿轮。
技术总结
本实用新型公开了一种陆空两栖微型无人机,包括机身,机身的四个边角处设置有连接臂,各连接臂的内部为空心结构,各连接臂的上部中间设置有驱动马达,各驱动马达的驱动轴延伸至所述连接臂内并且自由端设置有第一伞齿轮,各连接臂的内部在所述驱动马达的下方对称的固定设置有两个隔板,两个隔板上分别可转动的设置有一个从动轴,各从动轴位于两个所述隔板之间的一端分别设置有与第一伞齿轮相适配的第二伞齿轮,各从动轴的另一端分别通过电磁离合器与第一传动轴和第二传动轴的一端相连接。本实用新型可实现无人机陆地行驶和空中飞行两种工作模式的自动切换,无需人为的对无人机结构进行调整,陆空行驶切换方便快捷。陆空行驶切换方便快捷。陆空行驶切换方便快捷。
技术研发人员:闫兆 樊江川
受保护的技术使用者:北京卫通新科测控技术有限公司
技术研发日:2022.08.12
技术公布日:2022/10/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1