一种用于飞行器的大部件舱段对接装配的设备的制作方法
本申请涉及飞行器的制造装配领域,尤其涉及一种用于飞行器的大部件舱段对接装配的设备。
背景技术:
1、飞行器例如飞机是由数量众多的大部件舱段在理想情况下通过精确的测量系统测量定位及高精度调姿对接设备调姿对接后装配而成的。但是,目前飞行器的大部件舱段装配普遍采用专用刚性夹具对一个待对接装配的舱段进行装夹,然后由技术人员通过操纵简单的吊装工具并经过目测反复多次地相对于目标舱段对待对接装配的舱段进行调节,以实现舱段的对接。这种传统的装配方式严重依赖技术人员的经验、操作准确性和操作精度,并且需要多次调试,由此造成飞行器大部件舱段的整个对接装配过程存在一致性差、精度和效率低以及劳动强度大等缺点。
2、而且,虽然现有研究开展过关于飞机大部件的姿态调整用于实现对接装配的方法的探究,但是该方法基于pogo柱三点支撑进行飞机大部件的姿态调整,主要介绍了三点支撑时对飞机大部件的姿态可叠加特性的分析和支撑立柱受力变形的计算及数学模型的建立,而没有对用于大部件舱段对接装配的设备进行分析与研究。因此,对于飞行器的大部件舱段的对接装配工作,缺少硬件系统的开发,同时缺少面向工业实际应用的设备开发和实施工作。
技术实现思路
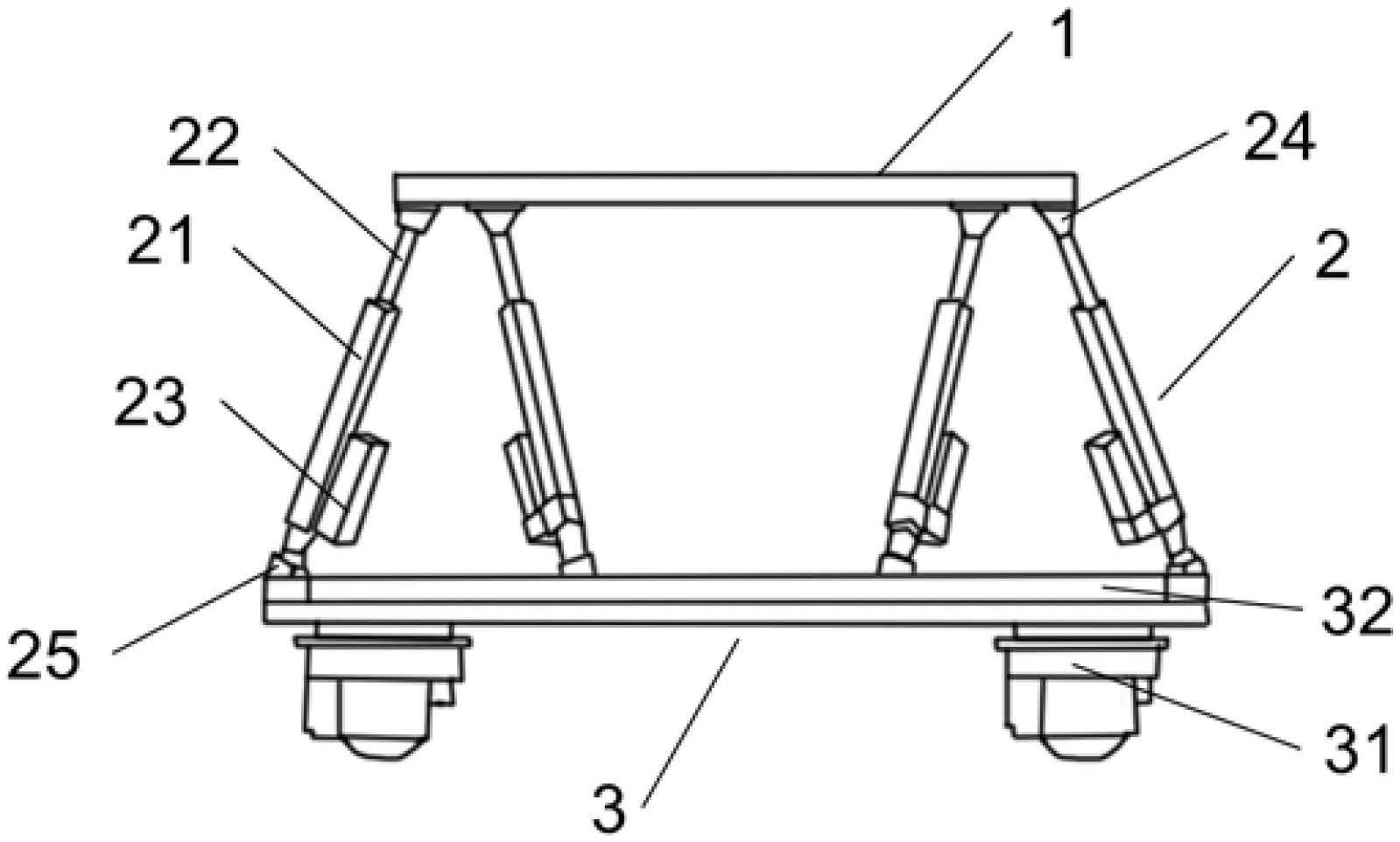
1、因此,本申请要解决的技术问题是克服现有的飞行器的大部件舱段对接装配过程中存在的严重依赖技术人员,且装配质量一致性差、精度低、效率低以及劳动强度大的问题,提供了一种用于飞行器的大部件舱段对接装配的设备。该方法通过上方的支撑平台承载待装配的舱段,采用多个位姿调节机构驱动支撑平台运动,从而将待装配的舱段的姿态调整成满足与目标舱段对接要求的目标位姿,并采用移动式行走机构使得包括待装配的舱段的该设备能够沿多个方向行走和原地旋转。
2、具体而言,本申请提供了一种用于飞行器的大部件舱段对接装配的设备,其特点在于,该设备包括:
3、用于承载待装配的舱段的支撑平台;
4、多个位姿调节机构,多个位姿调节机构能够拆卸地设置在支撑平台的下表面下方,并且被构造成能够在控制单元的控制下驱动支撑平台运动,从而将待装配的舱段的姿态调整成满足与目标舱段对接要求的目标位姿;和
5、移动式行走机构,移动式行走机构在其底部设置有多个运动部件,每个运动部件被构造为能够在控制单元的控制下运动,从而使得移动式行走机构能够沿多个方向行走和原地旋转,其中,多个位姿调节机构设置于移动式行走机构的上表面。
6、根据本申请的一种实施方式,多个位姿调节机构被构造成能够联动地沿着其各自的长度方向伸缩运动,从而将安置于支撑平台上的待装配的舱段的姿态调节至目标位姿。
7、根据本申请的一种实施方式,每个位姿调节机构包括具有能够伸缩的活塞杆的电动缸和安装于电动缸上的伺服电机,伺服电机被构造成能够驱动活塞杆进行伸缩运动。
8、根据本申请的一种实施方式,活塞杆的伸出端通过紧固件与固定于支撑平台下表面上的球铰固定连接。
9、根据本申请的一种实施方式,球铰被构造成能够通过紧固件与斜垫块固定连接,并经由斜垫块固定于支撑平台的下表面。
10、根据本申请的一种实施方式,每个位姿调节机构的下端通过紧固件与固定于移动式行走机构的上表面上的球铰固定连接。
11、根据本申请的另一种实施方式,每个位姿调节机构的下端与夹轨器固定连接,并且夹轨器固定连接至安装于移动式行走机构的上表面的导轨装置。
12、根据本申请的再一种实施方式,位姿调节机构被设置为八个,其均匀分布地设置在支撑平台的四周。
13、根据本申请的再一种实施方式,每个伺服电机的伺服驱动器被构造成能够通过ethercat总线采用级联的方式通信连接,并且伺服驱动器能够通过ethercat总线与控制单元通信连接。
14、根据本申请的再一种实施方式,运动部件被构造成舵轮,舵轮通过ethercat总线与控制单元通信连接并在控制单元的控制下实现万向行走和原地旋转。
15、根据本申请的再一种实施方式,移动式行走机构包括基本上呈长方形的底盘,舵轮为四个且分别设置在底盘的四个角部处。
16、根据本申请的再一种实施方式,底盘的周边围绕有壁面,控制单元安装于其中一侧的壁面上。
17、根据本申请的再一种实施方式,控制单元被构造成能够通过网线与上位机通信连接,根据来自上位机的目标位置和目标位姿并基于当前位置和当前姿态规划出合理的运动路径。
18、根据本申请的再一种实施方式,控制单元被配置成能够向位姿调节机构和移动式行走机构发送控制指令,以驱动位姿调节机构和移动式行走机构按照规划的运动路径运动,从而将待装配的舱段调整至目标位置与目标位姿。
19、根据本申请的再一种实施方式,控制单元被配置成能够接收来自位姿调节机构和移动式行走机构的有关待装配的舱段的运动状态的反馈。
20、在符合本领域常识的基础上,上述各优选实施方式,可任意组合,即得本申请各较佳实施方式。
21、本申请的上述实施方式的积极进步效果在于:
22、1、通过多个位姿调节机构调节驱动支撑平台运动,能够使得安置于支撑平台上的待装配部件的移动与旋转,从而将带装配部件调节至目标位姿;
23、2、通过控制单元驱动位姿调节机构和移动式行走机构按照规划的运动路径运动,有效地提高了舱段的对接装配效率,保证对接装配的一致性与精确性。
技术特征:
1.一种用于飞行器的大部件舱段对接装配的设备,其特征在于,所述设备包括:
2.根据权利要求1所述的设备,其特征在于,所述多个位姿调节机构被构造成能够联动地沿着其各自的长度方向伸缩运动,从而将安置于所述支撑平台上的待装配的舱段的姿态调节至目标位姿。
3.根据权利要求2所述的设备,其特征在于,每个位姿调节机构包括具有能够伸缩的活塞杆的电动缸和安装于所述电动缸上的伺服电机,所述伺服电机被构造成能够驱动所述活塞杆进行伸缩运动。
4.根据权利要求3所述的设备,其特征在于,所述活塞杆的伸出端通过紧固件与固定于所述支撑平台下表面上的球铰固定连接。
5.根据权利要求4所述的设备,其特征在于,所述球铰被构造成能够通过紧固件与斜垫块固定连接,并经由所述斜垫块固定于所述支撑平台的下表面。
6.根据权利要求1所述的设备,其特征在于,每个位姿调节机构的下端通过紧固件与固定于所述移动式行走机构的上表面上的球铰固定连接。
7.根据权利要求1所述的设备,其特征在于,每个位姿调节机构的下端与夹轨器固定连接,所述夹轨器固定连接至安装于所述移动式行走机构的上表面的导轨装置。
8.根据权利要求6所述的设备,其特征在于,所述位姿调节机构被设置为八个,其均匀分布地设置在所述支撑平台的四周。
9.根据权利要求3所述的设备,其特征在于,每个伺服电机的伺服驱动器被构造成能够通过ethercat总线采用级联的方式通信连接,并且所述伺服驱动器能够通过ethercat总线与所述控制单元通信连接。
10.根据权利要求9所述的设备,其特征在于,所述运动部件被构造成舵轮,所述舵轮通过ethercat总线与所述控制单元通信连接并在所述控制单元的控制下实现万向行走和原地旋转。
11.根据权利要求10所述的设备,其特征在于,所述移动式行走机构包括呈长方形的底盘,所述舵轮为四个且分别设置在所述底盘的四个角部处。
12.根据权利要求11所述的设备,其特征在于,所述底盘的周边围绕有壁面,所述控制单元安装于其中一侧的壁面上。
13.根据权利要求1所述的设备,其特征在于,所述控制单元被构造成能够通过网线与上位机通信连接,根据来自上位机的目标位置和目标位姿并基于当前位置和当前姿态规划出合理的运动路径。
14.根据权利要求13所述的设备,其特征在于,所述控制单元被配置成能够向所述位姿调节机构和所述移动式行走机构发送控制指令,以驱动所述位姿调节机构和所述移动式行走机构按照规划的运动路径运动,从而将待装配的舱段调整至所述目标位置与所述目标位姿。
15.根据权利要求14所述的设备,其特征在于,所述控制单元被配置成能够接收来自所述位姿调节机构和所述移动式行走机构的有关待装配的舱段的运动状态的反馈。
技术总结
本申请提供一种用于飞行器的大部件舱段对接装配的设备,其包括用于承载待装配的舱段的支撑平台;能够拆卸地设置在支撑平台的下表面下方的多个位姿调节机构,并且多个位姿调节机构被构造成能够在控制单元的控制下驱动支撑平台运动,从而将待装配的舱段的姿态调整成满足与目标舱段对接要求的目标位姿;和移动式行走机构,在移动式行走机构的底部设置有多个运动部件,每个运动部件被构造为能够在控制单元的控制下运动,从而使得移动式行走机构能够沿多个方向行走和原地旋转,其中,多个位姿调节机构设置于移动式行走机构的上表面。
技术研发人员:栾英伟,刘奎,张新宇,邢宏文,范晓骏,陈融融,陈玲玲
受保护的技术使用者:上海飞机制造有限公司
技术研发日:20221202
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!