一种空间飞行器的规避机动控制方法及装置与流程
本发明涉及空间飞行器,特别涉及一种空间飞行器的规避机动控制方法及装置。
背景技术:
1、当前轨道冲突事件频发,给空间飞行器的安全带来严峻挑战,亟待发展相应的规避机动控制技术。
2、相关技术中,大多以双方的相对距离作为主要优化控制指标,并未能充分利用威胁可能存在探测盲区的特点进行规避。因此,一旦威胁对我方实施持续的加速尾随跟踪策略,就会导致我方空间飞行器采取同步加速的规避策略,以期保持恒定的安全距离,从而与威胁形成“你追我赶”的博弈形式,其代价就是规避机动消耗的能量较高。
3、基于此,目前亟待需要一种空间飞行器的规避机动控制方法及装置来解决规避机动消耗的能量较高的技术问题。
技术实现思路
1、为了解决规避机动消耗的能量较高的技术问题,本说明书实施例提供了一种空间飞行器的规避机动控制方法及装置。
2、第一方面,本说明书实施例提供了一种空间飞行器的规避机动控制方法,包括:
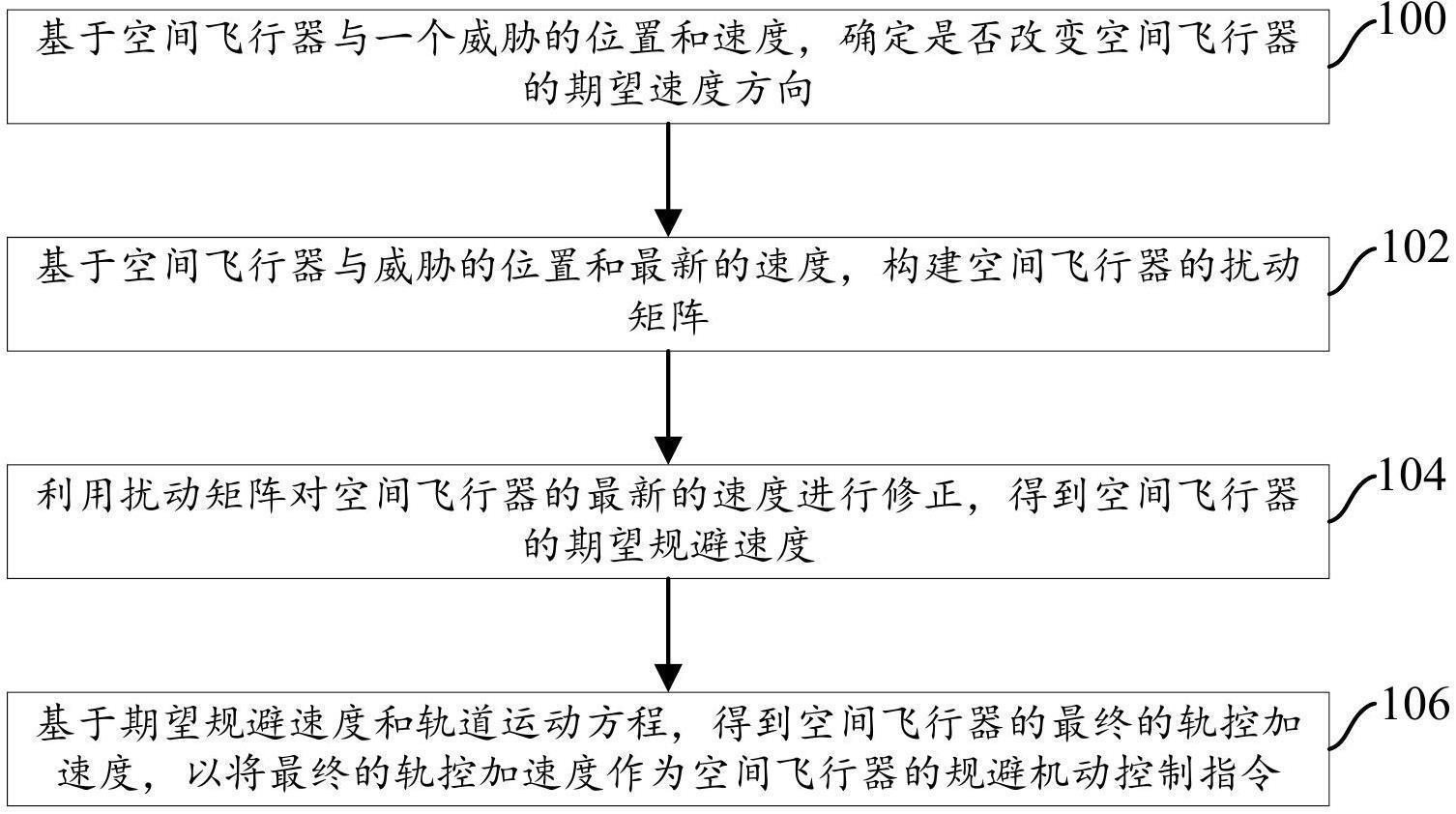
3、基于空间飞行器与一个威胁的位置和速度,确定是否改变所述空间飞行器的期望速度方向;
4、基于所述空间飞行器与所述威胁的位置和最新的速度,构建所述空间飞行器的扰动矩阵;其中,所述扰动矩阵包含三种可调参数,所述可调参数分别为径向反应系数、切向反应系数和方向系数,所述径向反应系数和所述切向反应系数决定规避时机,所述方向系数决定规避方向;
5、利用所述扰动矩阵对所述空间飞行器的最新的速度进行修正,得到所述空间飞行器的期望规避速度;
6、基于所述期望规避速度和预设的轨道运动方程,得到所述空间飞行器的最终的轨控加速度,以将所述最终的轨控加速度作为所述空间飞行器的规避机动控制指令。
7、第二方面,本说明书实施例还提供了一种空间飞行器的规避机动控制装置,包括:
8、确定模块,用于基于空间飞行器与一个威胁的位置和速度,确定是否改变所述空间飞行器的期望速度方向;
9、构建模块,用于基于所述空间飞行器与所述威胁的位置和最新的速度,构建所述空间飞行器的扰动矩阵;其中,所述扰动矩阵包含可调的径向反应系数、切向反应系数和方向系数,所述径向反应系数和所述切向反应系数决定规避时机,所述方向系数决定规避方向;
10、修正模块,用于利用所述扰动矩阵对所述空间飞行器的最新的速度进行修正,得到所述空间飞行器的期望规避速度;
11、输出模块,用于基于所述期望规避速度和预设的轨道运动方程,得到所述空间飞行器的最终的轨控加速度,以将所述最终的轨控加速度作为所述空间飞行器的规避机动控制指令。
12、第三方面,本说明书实施例还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
13、第四方面,本说明书实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
14、本说明书实施例提供了一种空间飞行器的规避机动控制方法及装置,通过基于空间飞行器与威胁的位置和最新的速度来构建空间飞行器的扰动矩阵,以利用扰动矩阵对空间飞行器的最新的速度进行修正而得到空间飞行器的期望规避速度,最后基于期望规避速度和预设的轨道运动方程,得到空间飞行器的最终的轨控加速度,以将最终的轨控加速度作为空间飞行器的规避机动控制指令。因此,上述方案可以使得空间飞行器具备在威胁处于己方后半球区域并进行持续尾随加速跟踪时突然转向适当逃逸方向的能力,以期以较小的能量消耗尽快进入威胁的探测盲区,这样有利于降低空间飞行器规避时的能量消耗。
技术特征:
1.一种空间飞行器的规避机动控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于空间飞行器与一个威胁的位置和速度,确定是否改变所述空间飞行器的期望速度方向,包括:
3.根据权利要求1所述的方法,其特征在于,令第一平面为所述威胁指向所述空间飞行器的位置向量和所述威胁的速度向量构成的平面,令第二平面为所述威胁指向所述空间飞行器的位置向量和所述空间飞行器的速度向量构成的平面;
4.根据权利要求1所述的方法,其特征在于,所述利用所述扰动矩阵对所述空间飞行器的最新的速度进行修正,得到所述空间飞行器的期望规避速度,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述期望规避速度和预设的轨道运动方程,得到所述空间飞行器的最终的轨控加速度,包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,在所述构建所述空间飞行器的扰动矩阵之后和在所述利用所述扰动矩阵对所述空间飞行器的最新的速度进行修正之前,还包括:
7.根据权利要求6所述的方法,其特征在于,所述利用actor-critic深度强化学习算法训练智能体,以得到目标神经网络,包括:
8.一种空间飞行器的规避机动控制装置,其特征在于,包括:
9.一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-7中任一项所述的方法。
技术总结
本发明涉及空间飞行器技术领域,特别涉及一种空间飞行器的规避机动控制方法及装置。其中,该方法包括:基于空间飞行器与一个威胁的位置和速度,确定是否改变所述空间飞行器的期望速度方向;基于所述空间飞行器与所述威胁的位置和最新的速度,构建所述空间飞行器的扰动矩阵;利用所述扰动矩阵对所述空间飞行器的最新的速度进行修正,得到所述空间飞行器的期望规避速度;基于所述期望规避速度和预设的轨道运动方程,得到所述空间飞行器的最终的轨控加速度,以将所述最终的轨控加速度作为所述空间飞行器的规避机动控制指令。本发明能够解决规避机动消耗的能量较高的技术问题。
技术研发人员:吴健发,魏春岭,张海博,李克行,黄盘兴,董峰,姜甜甜
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!