飞行汽车航行灯系统及其控制方法与流程
本发明涉及车灯,尤其涉及一种飞行汽车航行灯系统及其控制方法。
背景技术:
1、随着汽车保有量的与日剧增,未来地面道路的拥堵状况将会越来越发严峻,很大趋势是开辟空中航线,那么汽车的演变方向将是飞行汽车。飞行汽车在陆地上可以作为传统汽车行驶,在空中则可以通过启动车身螺旋桨开始飞行模式。
2、为了飞行驾驶模式时的行车安全,需要在飞行汽车上安装航行灯,也可以叫做位置灯,为其他飞行汽车或飞机等驾驶员指明当前飞行汽车的航行方向,具有重要的安全意义。
技术实现思路
1、本发明要解决的技术问题是:为了解决现有技术中飞行汽车照明的技术问题,本发明提供飞行汽车航行灯系统及其控制方法,通过在飞行汽车的不同位置设置不同灯光颜色,便于观察者通过看到的灯光颜色判断飞行汽车的飞行方向,进而减少发生碰撞的可能。
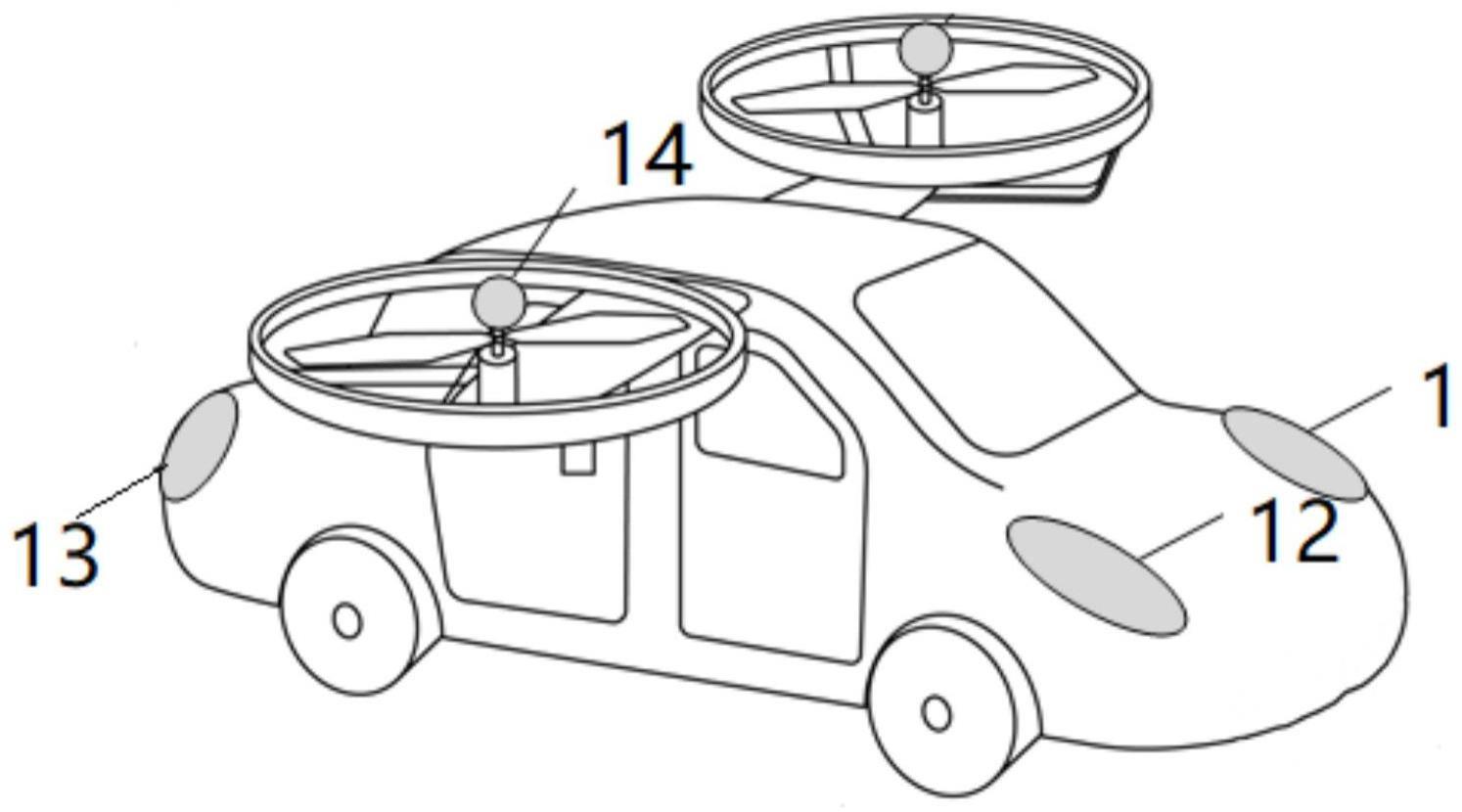
2、本发明解决其技术问题所采用的技术方案是:一种飞行汽车航行灯系统及其控制方法,包括第一航行灯,所述第一航行灯设于飞行汽车前端;第二航行灯,所述第二航行灯设于飞行汽车尾端;第三航行灯,所述第三航行灯设于螺旋桨上;所述第一航行灯、第二航行灯与第三航行灯根据所在车身位置不同而显示不同的颜色及不同的点亮效果。本发明的飞行汽车航行灯系统及其控制方法,通过在飞行汽车的不同位置设置不同灯光颜色和点亮效果,便于观察者通过看到的灯光颜色判断飞行汽车的飞行方向,进而减少发生碰撞的可能。
3、进一步,具体地,所述第一航行灯包括第一左航行灯和第一右航行灯,所述第一左航行灯设于飞行汽车的左前端,所述第一右航行灯设于飞行汽车的右前端。
4、进一步,所述第二航行灯贯穿飞行汽车的尾部。
5、进一步,每个所述第一航行灯、第二航行灯和第三航行灯均包括多个发光单元与一个控制单元,所述控制单元为每个发光单元提供至少三路恒流驱动,以调制至少三路色彩信息。
6、进一步,所述控制单元包括串联的防反接保护模块、共模抑制和差模抑制模块、dcdc降压模块和多通道线性恒流控制模块,所述多通道线性恒流控制模块与发光单元电连接,所述共模抑制和差模抑制模块上后端还连接有ldo线性恒压模块、微控制器模块和can通信模块,所述can与bcm进行can总线通信,以获取飞行汽车的实时高度信息,所述微控制模块通过spi实时控制多通道线性恒流模块,进而控制发光单元显示不同的颜色。
7、进一步,所述发光单元至少为20个。
8、进一步,所述发光单元包括光学透镜和rgbw光源,所述光学透镜用于调节光线方向及发光强度,所述rgbw光源用于被控制单元所驱动点亮为任意符合要求的颜色。
9、进一步,以行驶方向为水平0°,所述第一左航行灯的点亮范围为水平0~110°,所述第一右航行灯的点亮范围为水平0~-110°,所述第二航行灯的点亮范围为水平-110°~110°。
10、进一步,一种控制方法,包括上述的飞行汽车航行灯系统,还包括如下步骤:将所述第一左航行灯、第一右航行灯和第二航行灯均设置不同的灯光颜色,观察飞行汽车时,若同时看到第一左航行灯和第一右航行灯的灯光颜色,则飞行汽车为正向驶来;若同时看到第一左航行灯和第二航行灯的灯光颜色,则飞行汽车正从右向左飞行;若同时看到第一右航行灯和第二航行灯的灯光颜色,则飞行汽车正从左向右飞行;若近看到第二航行灯的灯光颜色,则飞行汽车与观察者为同向而行。
11、进一步,还包括如下步骤:
12、系统正常上电后,通过can总线读取bcm飞行汽车高度信息;判断是否处于飞行驾驶模式,如果处于飞行驾驶模式,则将灯光调节成飞行驾驶模式下的灯光,如果不处于飞行驾驶模式,则将灯光调节成传统汽车灯光模式;通过bcm锁车及断电信息判断是否驾驶员已下车且锁车,如果是,则结束流程,如果否,则继续读取飞行汽车高度信息,以此循环。
13、本发明的有益效果是,
14、1、通过在飞行汽车的不同位置设置不同灯光颜色和点亮效果,便于观察者通过看到的灯光颜色判断飞行汽车的飞行方向,进而减少发生碰撞的可能;
15、2、通过控制单元的设置,便于控制发光单元实时发出不同颜色的灯光,进而便于观察者看到不同的灯光颜色,以判断汽车的飞行方向。
技术特征:
1.一种飞行汽车航行灯系统,其特征在于:包括
2.如权利要求1所述的飞行汽车航行灯系统,其特征在于:所述第一航行灯包括第一左航行灯(1)和第一右航行灯(12),所述第一左航行灯(1)设于飞行汽车的左前端,所述第一右航行灯(12)设于飞行汽车的右前端。
3.如权利要求1所述的飞行汽车航行灯系统,其特征在于:所述第二航行灯(13)贯穿飞行汽车的尾部。
4.如权利要求1所述的飞行汽车航行灯系统,其特征在于:每个所述第一航行灯、第二航行灯(13)和第三航行灯(14)均包括多个发光单元(2)与一个控制单元(3),所述控制单元(3)为每个发光单元(2)提供至少三路恒流驱动,以调制至少三路色彩信息。
5.如权利要求4所述的飞行汽车航行灯系统,其特征在于:所述控制单元(3)包括串联的防反接保护模块(31)、共模抑制和差模抑制模块(32)、dcdc降压模块(33)和多通道线性恒流控制模块(34),所述多通道线性恒流控制模块(34)与发光单元(2)电连接,所述共模抑制和差模抑制模块(32)上后端还连接有ldo线性恒压模块(35)、微控制器模块(36)和can通信模块(37),所述can与bcm进行can总线通信,以获取飞行汽车的实时高度信息,所述微控制模块通过spi实时控制多通道线性恒流模块,进而控制发光单元(2)显示不同的颜色。
6.如权利要求5所述的飞行汽车航行灯系统,其特征在于:所述发光单元(2)至少为20个。
7.如权利要求5所述的飞行汽车航行灯系统,其特征在于:所述发光单元(2)包括光学透镜(21)和rgbw光源(22),所述光学透镜(21)用于调节光线方向及发光强度,所述rgbw光源(22)用于被控制单元(3)所驱动点亮为任意符合要求的颜色。
8.如权利要求2所述的飞行汽车航行灯系统,其特征在于:以行驶方向为水平0°,所述第一左航行灯(1)的点亮范围为水平0~110°,所述第一右航行灯(12)的点亮范围为水平0~-110°,所述第二航行灯(13)的点亮范围为水平-110°~110°。
9.一种控制方法,包括上述权利要求2所述的飞行汽车航行灯系统,其特征在于:还包括如下步骤:
10.如权利要求9所述的控制方法,其特征在于:还包括如下步骤:
技术总结
本发明涉及车灯技术领域,尤其涉及一种飞行汽车航行灯系统及其控制方法,包括第一航行灯,所述第一航行灯设于飞行汽车前端;第二航行灯,所述第二航行灯设于飞行汽车尾端;第三航行灯,所述第三航行灯设于螺旋桨上;所述第一航行灯、第二航行灯与第三航行灯根据所在车身位置不同而显示不同的颜色及不同的点亮效果。本发明的飞行汽车航行灯系统及其控制方法,通过在飞行汽车的不同位置设置不同灯光颜色和点亮效果,便于观察者通过看到的灯光颜色判断飞行汽车的飞行方向,进而减少发生碰撞的可能。
技术研发人员:王金磊,刘健,陈津义,薛蔚平
受保护的技术使用者:常州星宇车灯股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!