飞行器控制装置、飞行器控制方法以及记录介质与流程
本发明涉及一种飞行器控制装置、飞行器控制方法以及存储有程序的非暂时性计算机可读记录介质。
背景技术:
1、在日本发明专利公开公报特开2020-075649号中,公开了一种具有燃气轮机(gasturb i ne)、发电机、电池和马达的飞行器。发电机由燃气轮机驱动。通过发电机进行发电而得到的电力被储存于电池中。通过由电池供给的电力来驱动马达。在电池处于满充电状态的情况下,在燃气轮机停止的状态下,由电池向马达供给电力。
技术实现思路
1、燃气轮机的从该燃气轮机实际输出的输出功率对于所需求的该燃气轮机的输出功率的响应性较低。即使马达所需的电力急剧减少,由燃气轮机驱动的发电机的发电量也不会急剧减少。因此,在马达所需的电力急剧减少的情况下,存在电池会过充电的担忧。
2、本发明的目的在于解决上述技术问题。
3、本发明的一方式的飞行器控制装置对飞行器进行控制,该飞行器具有发电机、电池、马达、旋翼和升降舵,其中,所述电池储存由所述发电机供给的电力;所述马达由从所述发电机和所述电池中的至少一方供给的电力驱动;所述旋翼由所述马达驱动;所述升降舵调整机身的仰角,所述飞行器控制装置的特征在于,具有判定部和控制部,所述判定部根据所述电池的剩余容量,判定是否限制向所述电池供给由所述发电机发出的电力中的剩余电力;所述控制部在由所述判定部判定为限制向所述电池供给所述剩余电力的情况下,通过增加所述旋翼的转速即旋翼转速而使所述马达消耗所述剩余电力,并且,所述控制部通过调整所述升降舵的舵角限制由所述旋翼转速的增加引起的所述机身的上升。
4、本发明的另一方式的飞行器控制方法是一种控制飞行器的飞行器方法,所述飞行器具有发电机、电池、马达、旋翼和升降舵,其中,所述电池储存由所述发电机供给的电力;所述马达由从所述发电机和所述电池中的至少一方供给的电力驱动;所述旋翼由所述马达驱动;所述升降舵调整机身的仰角,所述飞行器控制方法的特征在于,具有:判定步骤,根据所述电池的剩余容量判定是否限制向所述电池供给由所述发电机发出的电力中的剩余电力;和控制步骤,在所述判定步骤中判定为限制向所述电池供给所述剩余电力的情况下,通过增加所述旋翼的转速即旋翼转速来使所述马达消耗所述剩余电力,并且通过调整所述升降舵的舵角来限制由所述旋翼转速的增加引起的所述机身的上升。
5、本发明的又一方式的存储有程序的非暂时性计算机可读记录介质,其特征在于,所述程序用于使计算机执行以下步骤:判定步骤,根据所述电池的剩余容量判定是否限制向所述电池供给由所述发电机发出的电力中的剩余电力;和控制步骤,在所述判定步骤中判定为限制向所述电池供给所述剩余电力的情况下,通过增加所述旋翼的转速即旋翼转速来使所述马达消耗所述剩余电力,并且通过调整所述升降舵的舵角来限制由所述旋翼转速的增加引起的所述机身的上升,所述计算机设置于飞行器,所述飞行器具有发电机、电池、马达、旋翼和升降舵,其中,所述电池储存由所述发电机供给的电力;所述马达由从所述发电机和所述电池中的至少一方供给的电力驱动;所述旋翼由所述马达驱动;所述升降舵调整机身的仰角。
6、根据本发明,可以提供一种能够抑制电池过充电的飞行器控制装置、飞行器控制方法以及存储有程序的非暂时性计算机可读记录介质。
7、根据参照附图对以下实施方式进行的说明,上述的目的、特征及优点应易于被理解。
技术特征:
1.一种飞行器控制装置(56),其对飞行器(10)进行控制,该飞行器(10)具有发电机(42)、电池(30)、马达(31a)、旋翼(18)和升降舵(17),其中,所述电池(30)储存由所述发电机供给的电力;所述马达(31a)由从所述发电机和所述电池中的至少一方供给的电力驱动;所述旋翼(18)由所述马达驱动;所述升降舵(17)调整机身(12)的仰角,所述飞行器控制装置(56)的特征在于,
2.根据权利要求1所述的飞行器控制装置,其特征在于,
3.根据权利要求2所述的飞行器控制装置,其特征在于,
4.根据权利要求3所述的飞行器控制装置,其特征在于,
5.根据权利要求3所述的飞行器控制装置,其特征在于,
6.根据权利要求1~5中任一项所述的飞行器控制装置,其特征在于,
7.一种控制飞行器的飞行器控制方法,所述飞行器具有发电机、电池、马达、旋翼和升降舵,其中,所述电池储存由所述发电机供给的电力;所述马达由从所述发电机和所述电池中的至少一方供给的电力驱动;所述旋翼由所述马达驱动;所述升降舵调整机身的仰角,所述飞行器控制方法的特征在于,
8.一种存储有程序的非暂时性计算机可读记录介质,其特征在于,
技术总结
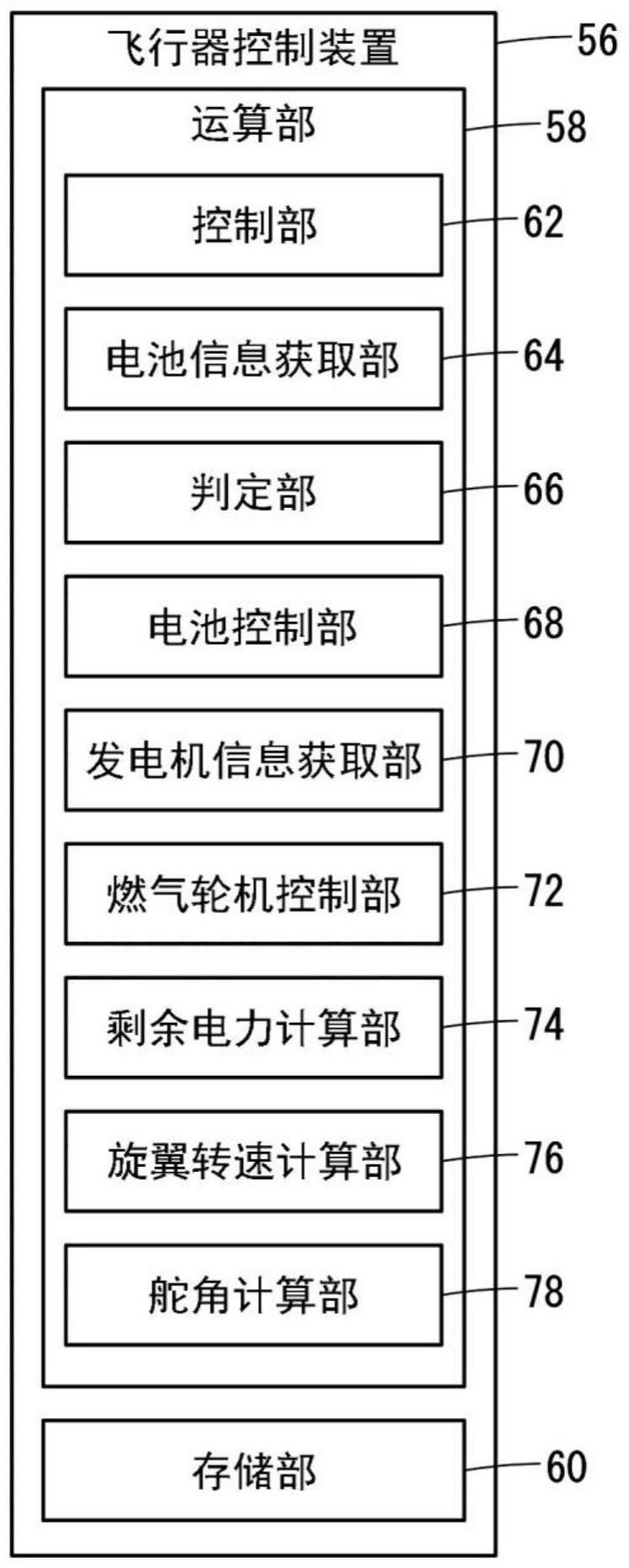
本发明提供一种飞行器控制装置、飞行器控制方法以及存储有程序的非暂时性计算机可读记录介质。飞行器控制装置(56)具有判定部(66)和控制部(62),所述判定部(66)根据电池(30)的剩余容量判定是否限制向电池供给由发电机(42)发出的电力中的剩余电力;所述控制部(62)在由判定部判定为限制向电池供给剩余电力的情况下,通过增加旋翼(18)的转速即旋翼转速使马达(31A)消耗剩余电力,并且通过调整升降舵(17)的舵角来限制由旋翼转速的增加引起的机身(12)的上升。据此,能够防止乘坐舒适性的降低等,并且能够良好地抑制电池过充电。
技术研发人员:羽贺久夫
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!