地面测试环境中惯性力模拟方法及系统与流程
本发明涉及航天航空地面测试,尤其涉及地面测试环境中惯性力模拟方法及系统。
背景技术:
1、随着我国技术的不断发展,特别是在航空航天技术领域的不断突破和飞速发展,在空间站建设、卫星和飞船等技术中,很多时候需要在地面进行模拟飞行的科学实验和飞行验证。例如,模拟机构在在失重或者微重力状态下的惯性力,对研究机构飞行的控制技术具有重要意义。
2、而现有技术在进行飞行验证试验过程中,常用的失重或者微重力环境模拟的方法按原理可以分为:运动法模拟微重力和力平衡法模拟微重力,运动法模拟微重力包括落塔法、抛物飞行法和探空火箭法等方式,力平衡法模拟微重力包括气浮法、水浮法、悬吊法、静平衡机构法、电磁平衡法等。其中静平衡法的装置结构精巧,易于实现,可实现多自由度微重力模拟,附加惯性效应小,缺点是微重力模拟精度易受弹簧刚度等因素影响。此外现有静平衡法微重力环境模拟装置主要是采用恒力气缸进行重力的卸载,达到微重力环境模拟,但是由于气体强可压缩性带来的非线性控制和时滞问题,严重影响微重力环境模拟的精度和响应速度,无法满足航天器的微重力环境模拟需求。
技术实现思路
1、本公开提供了一种地面测试环境中惯性力模拟方法及系统。
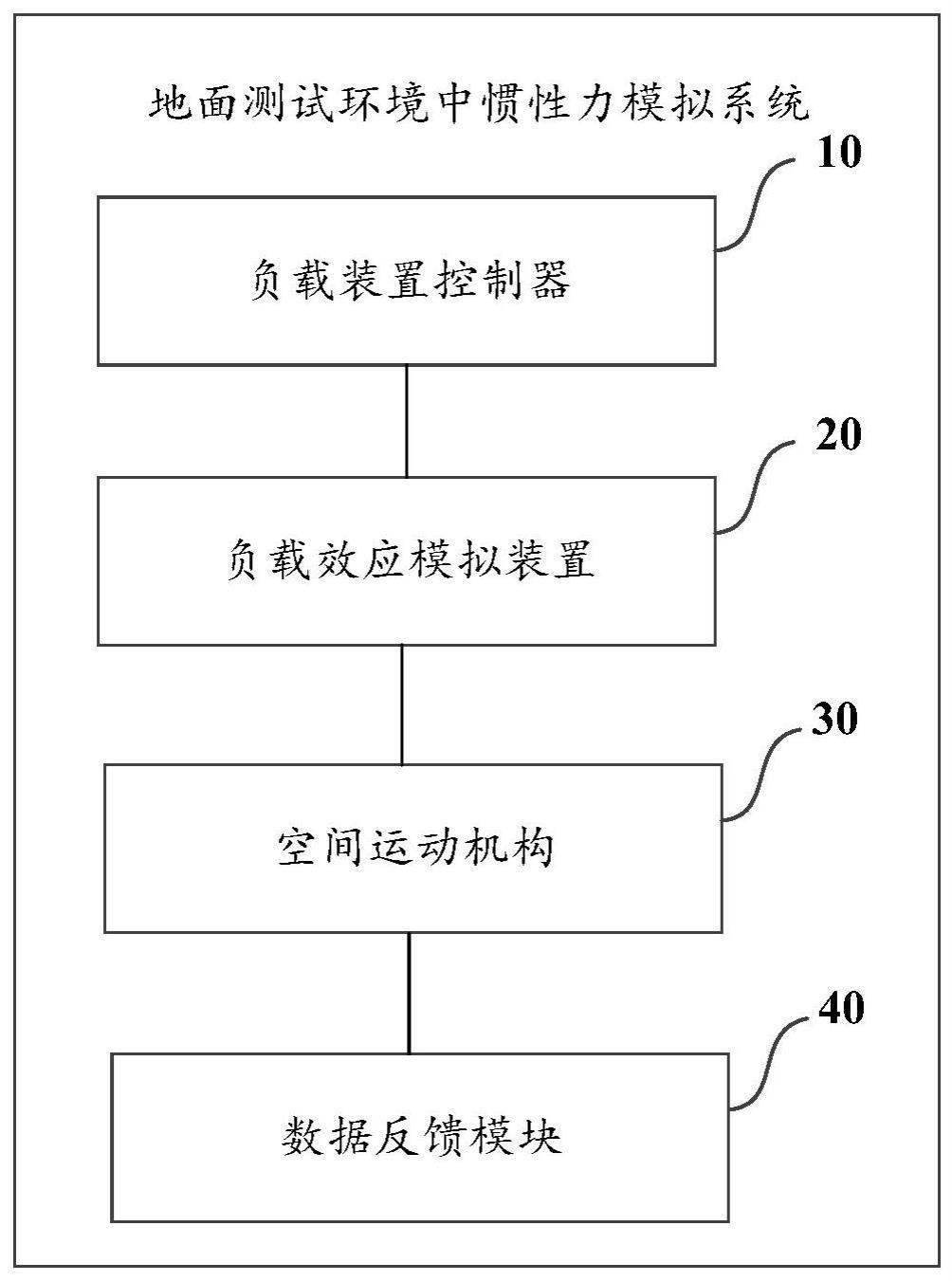
2、根据本公开的一方面,提供了一种地面测试环境中惯性力模拟系统,所述系统包括:负载装置控制器、负载效应模拟装置、空间运动机构和数据反馈模块,其中:
3、所述负载装置控制器,用于生成控制所述负载效应模拟装置力和力矩控制指令,向所述负载效应模拟装置发送力和力矩控制指令,并控制负载效应模拟装置运作;
4、所述负载效应模拟装置,用于模拟所述空间运动机构所受的惯性力,并根据接收到的所述力和力矩控制指令,生成需要施加在所述空间运动机构的力和力矩并输出至所述空间运动机构;
5、所述空间运动机构,用于根据接收到的所述力和力矩模拟预设航天器的受力结构;
6、所述数据反馈模块,用于实时获取所述空间运动机构的动态数据,并向所述负载装置控制器发送所述动态数据,及测量所述负载效应模拟装置的加载机构的位置数据,并向所述负载装置控制器发送所述位置数据。
7、可选地,所述数据反馈模块包括多维加速度传感器、多维力传感器和位置传感器;其中,
8、所述多维加速度传感器,用于实时采集所述空间运动机构的加速度信号;
9、所述多维力传感器,用于实时监测所述空间运动机构上加载的力和力矩,并监测所述负载效应模拟装置向所述空间运动机构输出的力和力矩;
10、所述位置传感器,用于获取所述负载效应模拟装置的加载机构的运动位置信息。
11、可选地,
12、所述负载装置控制器,还用于通过所述数据反馈模块接收所述系统内的所述多维加速度传感器发送的加速度信号,并根据所述加速度信号和空间运动机构的惯量,生成惯性负载指令,并将所述惯性负载指令作为所述力和力矩控制指令;
13、所述负载装置控制器,还用于接收所述系统外获取的力和力矩指令。
14、可选地,所述负载装置控制器,还用于获取历史力和力矩控制数据,并基于所述历史力和力矩控制数据生成所述力和力矩控制指令。
15、根据本公开的第二方面,提供了一种地面测试环境中惯性力模拟方法,应用于地面测试环境中惯性力模拟系统,所述方法包括:
16、负载装置控制器向负载效应模拟装置发送力和力矩控制指令,并控制负载效应模拟装置运作;
17、所述负载效应模拟装置模拟所述空间运动机构所受的惯性力,并根据接收到的所述力和力矩控制指令,生成需要施加在空间运动机构力和力矩并输出至所述空间运动机构;
18、所述空间运动机构根据接收到的所述力和力矩控制模拟预设航天器的受力结构;
19、数据反馈模块实时获取所述空间运动机构的动态数据,并向所述负载装置控制器发送所述动态数据,及测量所述负载效应模拟装置的加载机构的位置数据,并向所述负载装置控制器发送所述位置数据。
20、可选地,所述数据反馈模块包括多维加速度传感器、多维力传感器和位置传感器;所述方法还包括:
21、所述多维加速度传感器实时采集所述空间运动机构的加速度信号,并将所述加速度信号发送给所述负载装置控制器;
22、所述多维力传感器实时监测所述空间运动机构上加载的力和力矩,监测所述负载效应模拟装置向所述空间运动机构输出的力和力矩;
23、所述位置传感器获取所述负载效应模拟装置的加载机构的运动位置信息。
24、可选地,所述方法还包括:
25、所述负载装置控制器通过所述数据反馈模块接收所述系统内的所述多维加速度传感器发送的加速度信号,并根据所述加速度信号和空间运动机构的惯量,生成惯性负载指令,并将所述惯性负载指令作为所述力和力矩控制指令,并接收所述系统外获取的力和力矩指令。
26、可选地,所述方法还包括:
27、所述负载装置控制器获取历史力和力矩控制数据,并基于所述历史力和力矩控制数据生成所述力和力矩控制指令。
28、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如以上所述的方法。
29、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本公开的上述方法。
30、本公开实施例提供的本公开实施例提供的地面测试环境中惯性力模拟方法及系统,该系统包括负载装置控制器、负载效应模拟装置、空间运动机构和数据反馈模块,负载装置控制器用于生成控制负载效应模拟装置力和力矩控制指令,向负载效应模拟装置发送力和力矩控制指令,并控制负载效应模拟装置运作;负载效应模拟装置用于模拟空间运动机构所受的惯性力,并根据接收到的力和力矩控制指令,生成需要施加在空间运动机构的力和力矩并输出至空间运动机构;空间运动机构用于根据接收到的力和力矩模拟预设航天器的受力结构;数据反馈模块用于实时获取空间运动机构的动态数据,并向负载装置控制器发送动态数据,及测量负载效应模拟装置的加载机构的位置数据,并向负载装置控制器发送该位置数据。这样可以通过在地面测试环境中就可以实现对空间运动机构惯性力在失重或微低重力环境下的模拟。
技术特征:
1.一种地面测试环境中惯性力模拟系统,其特征在于,所述系统包括:负载装置控制器、负载效应模拟装置、空间运动机构和数据反馈模块,其中:
2.根据权利要求1所述的系统,其特征在于,所述数据反馈模块包括多维加速度传感器、多维力传感器和位置传感器;其中,
3.根据权利要求2所述的系统,其特征在于,所述负载装置控制器,还用于通过所述数据反馈模块接收所述系统内的所述多维加速度传感器发送的加速度信号,并根据所述加速度信号和空间运动机构的惯量,生成惯性负载指令,并将所述惯性负载指令作为所述力和力矩控制指令;
4.根据权利要求1所述的系统,其特征在于,所述负载装置控制器,还用于获取历史力和力矩控制数据,并基于所述历史力和力矩控制数据生成所述力和力矩控制指令。
5.一种地面测试环境中惯性力模拟方法,其特征在于,应用于地面测试环境中惯性力模拟系统,所述方法包括:
6.根据权利要求5所述的方法,其特征在于,所述数据反馈模块包括多维加速度传感器、多维力传感器和位置传感器传输的动态数据;所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述方法还包括:
8.根据权利要求5所述的方法,其特征在于,所述方法还包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求5-8中任一项所述的方法。
技术总结
本公开涉及地面测试环境中惯性力模拟方法及系统,该系统包括负载装置控制器、负载效应模拟装置、空间运动机构数据反馈模块,负载装置控制器用于向负载效应模拟装置发送力和力矩控制指令并控制负载效应模拟装置运作;负载效应模拟装置用于模拟空间运动机构所受的惯性力,并根据接收到的力和力矩控制指令,生成需要施加在空间运动机构的力和力矩并输出至空间运动机构;空间运动机构用于根据接收到的力和力矩模拟预设航天器的受力结构;数据反馈模块用于向负载装置控制器发送动态数据和位置数据。这样可以通过在地面测试环境中就可以实现对空间运动机构惯性力在失重或微重力环境下的模拟。
技术研发人员:吴帅,尚耀星,董韶鹏,孙庆杰
受保护的技术使用者:北京航辰机载智能系统科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!